

Research and development on Web-based 3D geographic information model management system
-
摘要: 数字孪生技术在我国各行业的应用正在加速推进,三维地理信息(简称:3D GIS)模型是数字孪生技术不可或缺的基础数据模型,开发具有自主知识产权的3D GIS模型管理平台的必要性不言而喻。参考开源地理信息框架Cesium,使用Java和JavaScript语言、开源代码及国产模型转换工具,开发基于Web的3D GIS模型管理系统,实现了LOD计算、模型合并与序列化、渲染优化、模型压缩与解压、场景漫游自定义控制等关键技术,能够将由无人机航拍的倾斜摄影像片转换为在Web浏览器中浏览的3D GIS模型,支持大容量3D GIS模型数据管理,方便用户高效完成场景编辑和模型渲染,提供安全、简便的数据共享接口,能够与其它信息系统无缝集成,为各类业务应用开发提供所需的数字孪生资源,方便各类业务应用以空间信息为载体整合相关数据,为业务提升赋能。Abstract: Today, the application of digital twinning technology in industries is accelerating. Since 3D geographic information (3D GIS) model is one of the indispensable basic data models of digital twinning technology, the necessity of developing 3D GIS model management platform with independent intellectual property rights is self-evident. By referring to the open source geographic information framework Cesium and using Java and JavaScript languages, open source code and domestic model conversion tools, the 3D GIS model management system based on Web is developed, and key technologies such as LOD calculation, model merging and serialization, rendering optimization, model compression and decompression, and customized control of scene roaming are realized. This system can convert oblique photograph taken by unmanned aerial vehicle into 3D GIS models browsed via Web browser, support large-volume 3D GIS model data management, facilitate users to efficiently complete scene editing and model rendering, provide safe and simple data sharing interface to enable seamless integration with other information systems. Besides, it can provide digital twin resources required for the development of various business applications and facilitate the integration of relevant data to empower business improvement by using spatial models as the carrier of various business applications.
-
随着基于地理信息系统(GIS,Geograghic Information System)与BIM(Building Information Modeling)等三维可视化应用需求不断增多,常常需要将由无人机航拍获得的倾斜摄影像片[1]转换为可在Web浏览器中漫游浏览的三维地理信息(简称:3D GIS)模型。“十四五”规划明确提出“以数字化助推城乡发展和治理模式创新,探索建设数字孪生城市”的总体规划,铁路部门积极响应国家要求,将铁路数字孪生技术发展置于铁路信息化建设的重要位置,而3D GIS模型是数字孪生技术[2]不可或缺的基础数据模型之一,开发具有自主知识产权的3D GIS模型管理平台的必要性不言而喻。
国内相关研究人员在使用Web 3D技术建立GIS系统方面进行了积极探索。郑之光[3] 对多源异构数据的格式转换、空间索引和地理配准进行研究,构建了3D Tiles的通用格式,解决了三维场景Tiles不通用的问题,提高了异构数据转换效率;高亚伟[4]对常用的开源Web 图形库(WebGL,Web Graphics Library)框架进行分析,实现了三维场景的 本浏览和量测功能,提供低成本的三维场景基础平台;许叙源[5]提出基于Ceisum的水陆融合三维场景构建方法,建立水下数字高程模型实现水下三维场景构建及渲染,采用经过纹理压缩及顶层重建的三维实景模型实现陆上三维场景,对两者进行边界高程修正后实现融合展示,实现不同GIS系统间数据融合;刘娇[6]开发了公路基础设施三维数字孪生平台,构建公路路面及周边环境、桥上桥下、隧道内外、建筑物室内外的三维数字孪生场景,有助于提高基础设施全息感知能力,实现基础设施全生命周期数字化管理。
目前,3D GIS模型数据管理软件主要被早期进入中国市场的国外软件厂商的垄断。面对美国针对中国核心科技封锁与企业制裁,我国各行业都面临着巨大的信息安全风险。在这样的产业和大环境背景下,国产化替代对保障中国数字经济建设全方位的信息安全和自主可控具有重要意义,尤其是作为基础支撑平台的3D GIS模型数据管理软件的国产化刻不容缓。现有的基于Web的3D GIS模型数据管理大多基于开源地理信息框架Cesium[7]实现,开发人员往往需要在开发一套Cesium程序作为场景背景的同时,再开发一套3D模型渲染程序显示业务模型,不但增加开发成本,且难以保持两套3D渲染程序之间渲染帧的同步,可能会造成画面抖动问题;而且3D渲染细节相对封闭,难以实现和业务数据的紧密融合。
铁路业务具有工作区域空间大、车站间距离远、工作场地内业务实体种类和数量众多的特点,业务管理人员依靠传统方法掌握业务实体信息、感知工作区域态势、传递工作指令造成了很大困难,在业务管理方面基于3D GIS的数字孪生技术具有良好应用前景。为此,中国铁路哈尔滨局集团有限公司信息技术所(简称:哈局信息所)于2020年组建Web 3D技术研究团队,对基于Web的三维数据可视化技术开展研究,基于开源技术和原生语言,开发了具有自主知识产权的基于Web的三维地理信息模型管理系统(简称:3D GIS模型管理系统),能够将由无人机航拍的倾斜摄影像片转换为可在Web浏览器中漫游浏览的3D GIS模型,支持大容量3D GIS模型数据管理,方便用户高效完成场景编辑和模型渲染,为各类业务应用开发提供所需的数字孪生资源。
1 前期工作基础及系统设计目标
1.1 前期工作基础
(1)研发团队组建
自2020年起,哈局信息所抽调青年技术骨干组建Web 3D学习小组进行相关研究,开展相关外国文献翻译和技术实践工作;2022年,该小组在补充人力后,建立了由“Web GIS”和“BIM综合应用”2个研究小组构成的研发团队,研究范围涉及Web 3D、虚幻5引擎、CAD图纸制作、BIM建模、三维数字资产制作、数字孪生闭环控制等多个方面,为该项目的研发开展全面技术积累。自2016年国内WebGL技术兴起,核心团队成员参加了最早期的开源渲染引擎中文化工作,积累扎实的底层技术。
(2)数据获取与业务分析
经过多年信息化建设,哈尔滨铁路局集团有限公司所属各单位积累了大量专业内部的数字孪生数据,如BIM数据、GIS数据、站场示意图、工务施工图等,可作为构建地理信息模型的原始数据。同时,哈局信息所在长期的面向铁路领域的技术研发和系统运维业务实践中,深入分析客运、货运、调度、工务、供电、机关管理等各类业务系统的核心数据,全面理解和把握各类铁路业务的数字孪生应用需求,能够对跨专业异构数据进行有效整合。
(3)广泛技术合作
多年以来,哈局信息所与大疆公司、国家测绘局、哈工大技术团队等企事业单位建立技术合作和知识分享渠道,能够借助合作单位的专业技术和设备获取高精度地理测绘数据,在本项目中使用的无人机航拍数据即由大疆公司的技术合作团队提供。
1.2 系统设计目标
考虑到市场上现有的主流地理信息框架无法进行比较精细的场景控制,参考国外知名地理信息框架Cesium ,遵循实用、经济、先进、开放、安全的原则,统筹兼顾相关各类业务需求,注重功能适用性和数据兼容性,研发具有自主知识产权的3D GIS 模型管理系统,实现以下设计目标:
(1)实现数据模型高效转换与优化
将无人机航拍采集的倾斜摄影像片高效转换为通用的三维模型数据,建立模型优化工作流,自动快速实现大量三维模型的合并、文本数据序列化、模型数据压缩等处理,降低三维模型数据的存储空间占用和传输带宽消耗。
(2)实现3D GIS模型资源统一管理
建立3D GIS 模型管理的统一管理和维护平台,对大量3D GIS对象进行有效组织,便于用户快速查询浏览,为各类业务应用开发提供内容丰富、易于访问的数字孪生应用建模资源。
(3)支持灵活便捷的场景编辑及高效的模型渲染
基于自主研发的多层次细节模型(LOD,Levels of detail)[8]和缓存等技术,实现3D GIS模型的高效加载,提供灵活便捷的场景编辑操作,高效的模型渲染操作,提供修改过程跟踪、场景性能分析等辅助工具,方便用户制作满足不同应同需求的数字孪生应用建模资源。
(4)为数字孪生应用开发提供有力支撑
为各类业务应用系统提供安全、可靠的数据共享接口,方便业务应用系统开发人员按需调用该系统中的数字孪生应用建模资源。
2 系统设计
2.1 核心数据处理及基本工作流程
基于开源技术和原生语言,采用国产模型转换工具和MySQL数据库,搭建一个基于Web的3D GIS模型管理系统,能够将由无人机航拍获得的倾斜摄影像片转换为3D GIS模型,对大量3D GIS模型资源进行统一管理,实现3D GIS模型的高效加载、场景编辑和渲染处理。
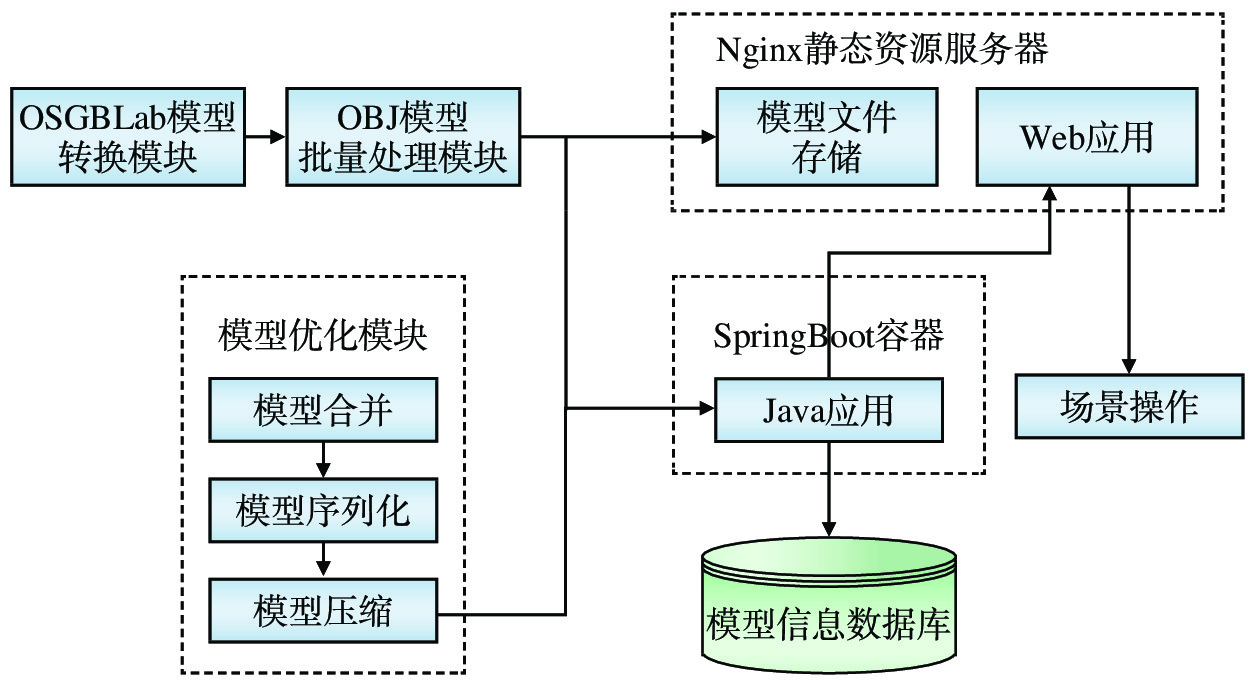
该系统主要由模型转换、场景操作、模型优化3个核心数据处理模块构成,基本工作流程如图1所示。
(1) 模型转换:通过程序调用国产模型转换工具OSGBLab,将倾斜摄影像片文件转换为通用的OBJ 格式3D模型文件;通过设置变换矩阵,对转换后的模型进行位置、姿态、缩放等调整,将处理好的3D模型文件集中存储在Nginx静态资源服务器中;同时,确定3D模型间层级结构和父子关系,将对应的信息存入模型信息数据库并建立索引,方便检索3D模型;建立展示3D模型的Web应用,使用户可以在Web客户端浏览器中查看3D模型。
(2) 模型优化:该模块是使用Java和JavaScript语言开发的一组模型优化程序,可通过工作流引擎驱动执行,将多个开源工具进行整合,完成3D模型的合并、序列化和压缩处理,进一步提高模型存储的空间利用率和模型传输的带宽利用率。
(3) 场景操作:基于自主研发的LOD和浏览器缓存等技术,实现场景漫游、场景编辑功能,支持大量地形瓦片的高效切换和细节层次变更,保证数据读取的高性能;场景操作页面可以方便地与其它Web信息系统相互融合,也可以通过Java应用为其他信息系统提供标准化的数据接口。
2.2 功能设计
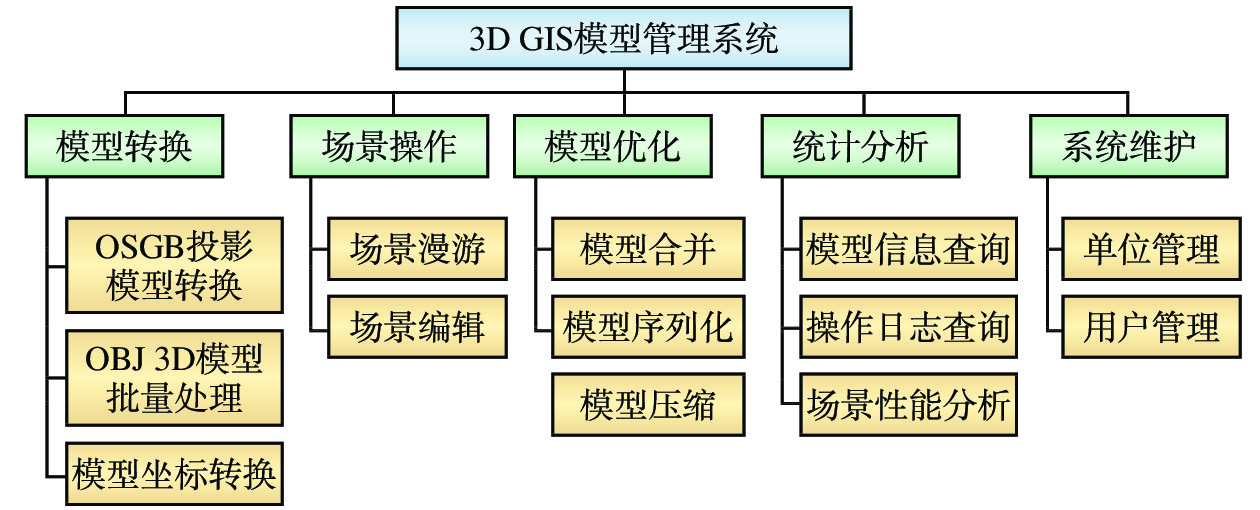
3D GIS模型管理系统定义了3种用户角色:数据操作员、普通用户、系统管理员;除了完成模型转化、场景操作和模型优化3项核心数据处理功能,该系统还提供统计分析和系统维护功能,使用户能够全面掌握该系统所管理的3D GIS模型资源的概况和详情,跟踪和追溯3D GIS模型资源的处理过程,方便系统管理员用户完成用户管理等系统维护操作。
3D GIS模型管理系统完整的功能模块结构如图2所示。
2.2.1 模型转换
模型转换模块主要包括OSGB投影模型转换、OBJ 3D模型批量处理、模型坐标转换3个子模块。该模块基于SpringBoot框架开发,负责各模块间的数据流动和整体调度,对用户提供的倾斜摄影像片文件进行转换和处理后,转化为OBJ 格式3D模型文件集中存储,同时建立存储3D模型结构信息的模型信息数据库,方便3D模型的查询和快速读取。
(1)OSGB投影模型转换:调用国产模型转换工具OSGBLab,对航拍获取的OSGB投影像片文件进行批量处理,将其转换为通用的OBJ格式3D模型数据文件;对于数据量较大的OSGB投影像片数据文件,可先将其拆分为多个子模型数据文件后进行批量转换,后续再进行合并处理;在进行转换时,需要对OSGBLab工具的转换选项进行设置,如是否保留层次细节、是否进行纹理合并等,以避免默认转换选项导致的LOD数据丢失。
(2)OBJ 3D模型批量处理:3D GIS模型管理系统将3D模型空间划分为多个业务区域,每个业务区域包含多个层级,每个层级包含多个地块,一个地块包含多个OBJ模型。对批量转换后生成的大量OBJ 3D模型数据文件进行批量处理,建立这些3D模型间的层级结构和父子关系(即3D模型结构信息),并据此对OBJ 3D模型数据文件的文件名和存储路径进行修改后,将其存储在静态资源服务器中;同时,将3D模型的结构信息存入模型信息数据库并建立索引。
(3)模型坐标转换:完成倾斜摄影像片数据的转换和导入,当原始的倾斜摄影像片数据的坐标系与3D GIS场景的坐标系存在差异时,为模型数据增加位置、姿态、缩放变化,使之显示在正确的坐标系中。
2.2.2 场景操作
场景操作模块使用原生JavaScript语言和基于开源渲染引擎BabylonJS进行开发,主要包括场景漫游和场景编辑2个子模块,为用户提供多种场景漫游方式和3D物体交互方式;为方便与其它信息系统的页面相互引用,该模块使用经典的非模块化开发方式开发。
(1)场景漫游:数据操作员使用该项功能,将大量3D模型加载到Web GL场景中,将这些模型拼接在一起组成模拟街景。普通用户可使用该项功能来浏览各种模拟街景中3D模型,支持自由相机、弧形旋转相机、带3个自由度的第一人称相机等多种漫游方式,并与场景中各类3D物体交互,支持拾取、碰撞检测、群组导航等多种交互方式。
(2)场景编辑:数据操作员编辑场景中的3D对象,如标记、指示牌、表格、BIM信息入口、跳转链接等。
2.2.3 模型优化
模型优化模块包括模型合并、模型序列化、模型压缩3个子模块,分别调用相应程序或工具完成模型合并、序列化、压缩操作,以提高系统加载模型数据的整体效率。
(1)模型合并:在总文件尺寸相同的条件下,更多的模型数据文件会产生更大的性能开销,将模型数据文件进行合并,以有效降低因模型数据文件过多带来的重复发送Http请求头部信息、在前端渲染框架中存储相应属性信息、增加网格遍历次数等造成的性能开销。
(2)模型序列化:将文本格式的OBJ模型转化为二进制GLB模型,以减少图片文件和材质描述文件的数量。
(3)模型压缩:组合使用前台渲染引擎、Java语言编制压缩程序、开源编码工具和压缩工具,对GLB文件中的图像、浮点数等数据进行压缩处理,进一步降低数据存储空间及网络传输带宽占用。
2.2.4 统计分析
提供系统所管理的模型对象以及模型数据处理的各类操作的信息汇总与条件查询,包括模型信息查询、操作日志查询和场景性能分析。
(1)模型信息查询:按照用户指定的业务区域范围,检索该业务区域内所包含的模型对象概要情况,并显示每个模型的属性信息。
(2)操作日志查询:将对模型的每一步修改操作保存进日志,用于进行数据异常时进行操作回滚,并作为工作量统计依据。
(3)渲染性能分析:计算3D GIS场景的渲染性能参数指标,包括帧率、顶点数、面数、内存占用等,为后期场景渲染调优提供依据。
2.2.5 系统维护
完成单位和用户设置,建立基于单位和用户角色的权限管理,使用户只能查询或修改被授权的业务区域的模型数据。
(1)单位管理:完成单位信息的增、删、改操作,设置每个单位与其自身管理职责相对应的模型管理范围及硝唑权限,包括该单位用户对模型的编辑权限以及在场景中的漫游区域的限制。
(2)用户管理:完成系统用户信息的增、删、改操作,按照等级保护规定的严格管理设置用户角色和操作权限,并将用户敏感操作记录在日志中用于审计。
3 关键技术
3.1 LOD算法
LOD是一种有效的三维图形生成加速技术,能够在不影响画面视觉效果的前提下,通过逐次简化景物的表面细节来降低场景的几何复杂度,提高绘制算法的效率。根据物体模型的节点在显示环境中所处的位置和重要度,决定物体渲染的资源分配,降低非重要物体的面数和细节度,从而实现高效的渲染运算。选择在模型转换阶段,可为每个地块生成多个不同精细度的模型,在相机距离该地块较近时显示高精度模型,在距离较远时显示低精度模型,以有效减少场景中需要绘制的面数,提高场景漫游渲染效率。不同细节层次模型的对比如图3所示,同一建筑物的模型精细度从左到右逐渐增大。
与传统的基于四叉树[9]或八叉树的LOD算法不同,本文采用数据库索引加速LOD计算:将空间划分为多个较大的业务区域,为每个业务区域在数据库中建立索引,在OBJ模型处理环节,根据每个地块到每个业务区域的距离,计算出这个地块在这个业务区域应该显示的细节等级,并存入数据库表中。当用户在场景中移动一段距离引起所在业务区域变化时,根据业务区域索引即可快速查询到用户附近所有地块的细节层级,进而加载对应细节层级的模型文件,相比于传统算法,这种算法更加适用于带有数据库查询环节的LOD计算。
3.2 渲染优化
WebGL是一种3D绘图协议,这种绘图技术标准允许把JavaScript和OpenGL ES 2.0结合在一起,通过增加OpenGL ES 2.0的一个JavaScript绑定,WebGL可以为HTML5 Canvas提供硬件3D加速渲染,这样Web应用开发人员就可以借助系统显卡,在浏览器里更流畅地展示3D场景和模型,还能创建复杂的导航和数据视觉化。采用WebGL技术标准后,Web应用开发人员无需使用开发网页专用渲染插件,就可创建具有复杂3D结构的网站页面,甚至可以用来设计3D网页游戏等。
为提高渲染速度,对发送给底层OpenGL渲染管线[10]的数据进行多项优化,包括:(1)在模型加载完毕后,冻结模型材质、模型世界矩阵,以避免主线程重复向渲染管线发送材质信息和世界矩阵信息;(2)关闭活动模型检测,以减少判断模型是否存在的计算;(3)将多个模型的添加和释放合并为一个“操作组”发送给渲染管线,以减少主线程对渲染管线的调用次数。此外,为避免未知异常造成渲染过程崩溃,针对浏览器的“canvas上下文丢失”事件编写响应函数,用于当渲染进程崩溃时自动重建3D场景。
3.3 模型合并与序列化
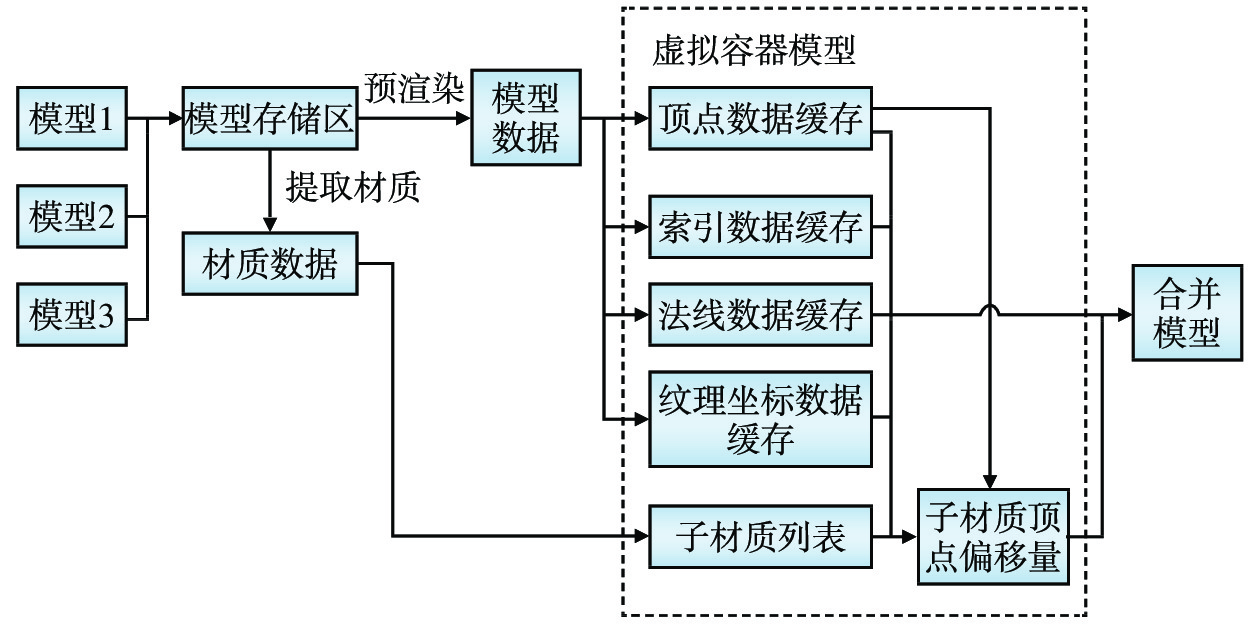
由航拍获得的原始OSGB模型数据文件数量较多,频繁的模型加载会对前端浏览器和静态资源服务器产生较大负载,为降低模型文件IO量,开发了模型数据文件合并和序列化程序。模型合并的处理流程如图4所示。
(1)把某个地块所包含的全部模型加载到模型合并程序的模型存储区中进行预渲染,以获取模型内保存的各类数据。
(2)建立一个虚拟模型作为容器,将每个模型的顶点数据、索引数据、法线数据、纹理坐标数据提取出来,放入容器模型的数据缓存中。
(3)将每个模型的材质数据放入容器模型的子材质列表中,为每一个子材质设置该材质对应的子模型在容器模型的顶点缓存中对应的顶点偏移量,即可将多个子模型整合为一个容器模型。
将合并后的容器模型数据进行序列化,以GLTF模型标准[11]的二进制格式—GLB格式导出,可将OBJ模型的材质描述文件和纹理文件以二进制方式整合到模型文件内部,这样通常能够将文件数量减少2/3,所生成GLB格式文件更适于网络传输,且可以部分加载,能够快速将文件内容复制进缓存。
3.4 模型压缩与解压
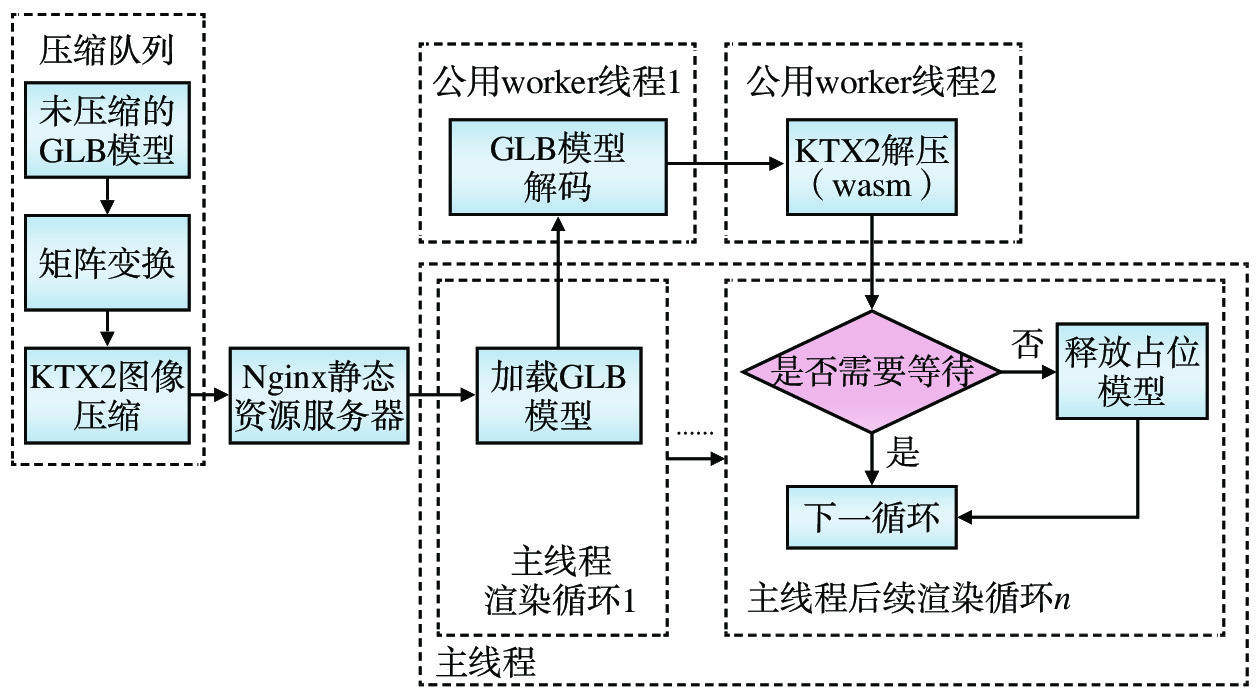
为提高GLB模型文件加载速度,使用开源工具gltfpack对GLB模型进行压缩,压缩后文件体积约为压缩前的1/3(文件后缀名仍为glb)。对于GLB文件中的顶点数据,该工具会自动进行矩阵变换,将顶点位置的浮点数变换为更节省存储空间的形式进行保存;在读取变换后的模型时,又会进行反变换,以保证模型位置、缩放、姿态的正确;对于GLB文件中的纹理图像数据,可使用该工具将图片压缩为KTX2格式;浏览器主线程在读取模型时,专门建立一个work线程进行解压操作。
GLB模型文件压缩与解压的流程如图5所示。
(1)当浏览器主线程从Nginx静态资源服务器中将一个GLB模型文件下载到本地后,生成并启动“公共worker线程1”对GLB模型文件进行解码。
(2)浏览器主线程接着生成并启动“公共worker线程2”进行图像数据解压,并使用wasm解码器[12]来加快解压速度;相对于直接使用主线程解码,使用worker线程解码能够提高计算机CPU利用率,降低主线程负载;相对于为每个模型启动一个解码线程,使用公共解码线程能够减少线程上下文及wasm解码器的加载次数,防止加载大量模型时发生浏览器线程异常。
(3)解压后的GLB模型数据被送回浏览器主线程(这时已经进入主线程的后续渲染循环),由浏览器主线程判断这个模型是否有必要和其它模型同时显示,比如当用户要放大某一片区域时,原本表示这片区域的一个低精度模型可能要被多个高精度模型代替,为了避免因高精度模型未完全加载完毕造成画面出现闪烁或空洞,需要先使用低精度模型占位。
(4)当所有高精度模型加载完毕后,即可释放低精度模型;由于模型的网格、纹理和材质是异步生成的,因此需要分别对每个模型的网格、纹理、材质生成状态进行判断,只有当三者均生成完毕后才可确定该模型已完成加载。
3.5 场景漫游自定义控制
为了取得更为精细的场景漫游控制效果,使用自定义控制方法取代各类地理信息平台中常用的自由相机控制方法(即按住鼠标左键拖动改变视角,按上、下、左、右键来前、后、左、右移动相机)。自定义控制方法包括锁定指针、碰撞检测和场景交互3类主要操作。
(1)锁定指针:开启自定义控制后,鼠标指针即变为十字准星,并锁定在屏幕中央,用户此时可在3D空间中进行更精细的场景互动;移动控制按键转变为W、A、S、D、空格和C键,分别对应前、后、左、右、上、下移动控制,能够支持3个运动自由度,比一般的开源GIS框架多增加1个运动自由度,使用户在空间中的移动操作更加灵活。十字准星形状的鼠标指针是通过在相机前方绘制高渲染组的线段实现的,而鼠标指针锁定效果则是通过调用浏览器API实现;在每一渲染帧间隔检测鼠标移动像素数,将移动像素数与屏幕尺寸和OpenGL视椎体角度相比,计算出相机的姿态变化矩阵(即角度调整量);运动控制切换通过在每个渲染帧间隔检测按键状态,将按键状态向量与帧间隔时间预设速度向量、及相机的位置变化矩阵相乘,计算得到相机在这一帧中的位置变化向量,即令按键状态向量为Vk、帧间隔时间为t(常量)、预设速度向量为Vv、相机位置变化矩阵为At,则位置变化向量Vt可表示为
Vt=Vk⋅t⋅Vv⋅At (1) (2)碰撞检测:当相机移动时,朝相机预计移动的方向发出设定长度的射线,对射线穿过的多边形队列进行分析,如果穿过了障碍体多边形(如模型中的建筑或为限制用户移动范围所设置的空气墙),则将相机的碰撞球边界移动到与障碍物相交的位置,避免自由相机穿越墙壁,以增强场景的真实感,同时还可根据用户权限灵活限制其漫游范围。
基于射线的碰撞检测原理如图6所示,在图中显示的停车场场景中,当相机(以绿色球体表示)由左向右移动时,从相机所在位置向相机移动方向发射一条射线(以红色线段表示),碰撞检测程序计算该射线与场景中各个多边形的关系,发现射线穿过3辆汽车对象所包含的多边形(射线与多边形的交点以蓝色小球表示);把这些多边形按距离相机从近到远的顺序排列,所得到的数组即为该射线与模型相交的多边形队列;按顺序遍历该队列中的每个多边形,如果有一个多边形在相机的一定距离以内,并且多边形所在的物体是具备阻挡作用的障碍物(如汽车车门),则认为相机将要与障碍物发生碰撞,阻止相机继续向右移动。
(3)场景交互:当用户按下鼠标左键或鼠标右键时,从准星位置发出射线,根据射线接触到的对象、左右键、用户自身状态的不同触发相应的场景反馈,包括进入建筑、打开详细信息、弹出其它页面、播放视频等。此外,还可用于向场景中放置各类3D对象(如广告牌、3D标记、建筑物等),当数据操作员按下快捷键后,用户视窗底部将显示可用的3D对象列表,数据操作员通过点选或鼠标滚轮选中3D对象后,即可将选择的3D物体对象添加到场景中。
数据操作员可对这些3D对象进行编辑,在编辑时使用隐藏的canvas完成即时图像绘制,然后抽取所绘制图像的DataURL作为3D对象的动态纹理,以实现所见既所得的实时渲染效果。场景交互示例如图7所示,数据操作员在当前场景中放置一个文本标签对象,该文本标签对象生成后,即可在场景中直接编辑文本标签的文字内容、前景色、背景色、字号、位置、缩放等属性,可即时得到该对象的渲染结果,无需再使用其它纹理编辑工具绘制纹理后重新导入模型管理系统,极大地简化了渲染操作处理流程。
4 结束语
使用Java和JavaScript语言、开源代码及国产模型转换工具,自主开发基于Web的3D GIS模型管理系统,实现了类似开源地理信息框架Cesium的若干关键技术,具备市场上主流WebGL轻量化渲染功能。该系统采用模块化设计,结构合理,处理流程顺畅连贯,提供便捷灵活的人机交互界面,操作方便;提供安全、简便的数据共享接口,能够与其它信息系统无缝集成,为各类业务应用开发提供所需的数字孪生资源,方便各类业务应用以空间信息为载体整合相关生产数据,扩展业务管理的感知维度,提高工作效率,降低管理成本。
目前,该系统已应用于哈尔滨铁路局集团公司的数字孪生建设工程,完成了所辖各车站的站内建筑、轨道、道岔、信号机等对象的3D GIS模型构建,并结合既有的GIS、BIM数据以及人工标注,实现在虚拟空间中直观显示各类业务物体。利用该系统建立的3D GIS模型将率先应用于新建口岸站—同江北站的数字孪生呈现试点项目中,帮助提升车站国际联运管理效率,为国家一带一路战略做出贡献。
-
[1] 童杨津,丁进选,赵文峰,等. 倾斜摄影在城市道路竣工测量中的应用分析 [J]. 科技创新与应用,2022,12(31):39-42. [2] 陶 飞,刘蔚然,刘检华,等. 数字孪生及其应用探索 [J]. 计算机集成制造系统,2018,24(1):1-18. [3] 郑之光. 基于Cesium的多源异构三维数据地理配准研究 [J]. 中阿科技论坛(中英文),2023(4):121-125. [4] 高亚伟. 基于开源引擎的三维场景基础平台搭建方法及实现 [J]. 测绘标准化,2023,39(1):22-26. [5] 许叙源. 基于Cesium的水陆融合三维场景构建研究 [J]. 广东水利水电,2023(2):80-83. [6] 刘 娇. 一种基于Cesium的公路数字孪生平 [J]. 中国科技信息,2023(4):90-91. [7] 李婷娜,田冬迪,董明泽. 基于Cesium实景三维共享服务的研究 [J]. 智能建筑与智慧城市,2022(6):46-48. [8] 丁田妹,徐发达. 三维模型中多层次细节LOD技术研究 [J]. 电子制作,2021(18):35-37. [9] 代欣位,郭甲腾,刘善军,等. 基于动态四叉树索引的三维地质模型组合剖切算法 [J]. 地理与地理信息科学,2020,36(4):8-13. [10] Dave Shreiner, Graham Sellers, John Kessenich. OpenGL编程指南(原书第8版)[M]. 北京: 机械工业出版社, 2016: 7-10. [11] khronos国际标准化组织. GLTF文件结构参考文档[EB/OL].https://registry.khronos.org/glTF/specs/2.0/glTF-2.0.pdf. [12] Scott McCarty. Why the world needs Wasm [J]. InfoWorld.com, 2022(9).
-
期刊类型引用(3)
1. 李特. 基于ERDAS APOLLO的铁路海量地理信息数据管理系统研究. 铁道勘察. 2024(05): 142-149 .  百度学术
百度学术
2. 刘钊,梅傲寒,李木子,高强,孙阳. 城市级倾斜摄影模型的网页端加载方法研究. 铁路计算机应用. 2024(12): 31-36 . 本站查看
3. 范仁晶,张德智,沈成银,卢晶,朱长江,马林园. 基于虚拟现实(VR)的联轴器监控系统研究. 重型机械. 2024(06): 68-72 . 百度学术
其他类型引用(0)
 下载:
下载:




计量
- 文章访问数: 146
- HTML全文浏览量: 88
- PDF下载量: 33
- 被引次数: 3
