

Comprehensive transportation hub intelligent parking system based on multi technology integration
-
摘要: 针对综合交通枢纽的停车场车位引导难、停车拥堵、寻车难等问题,提出了一种基于三维全景建模、车辆识别、室内导航等多技术融合的智能停车系统。该系统通过车辆识别技术获取车辆品牌、车牌号码等信息,通过三维全景建模和室内导航技术实现停车场实景导航,做到快速停车、便捷寻车,提升用户体验。Abstract: Aiming at the problems of difficult parking space guidance, parking congestion and difficult vehicle search in the parking lot of the comprehensive transportation hub. This paper presented an intelligent parking system based on multi technology integration of 3D panoramic modeling, vehicle recognition and indoor navigation. The system obtained vehicle brand, license plate number and other information through vehicle recognition technology, realizeed the real scene navigation of parking lot through 3D panoramic modeling and indoor navigation technology, achieved fast parking and convenient car search, and improved the user experience.
-
Keywords:
- intelligent parking /
- vehicle identification /
- 3D panoramic modeling /
- digital twinning /
- applet
-
近年来,各地大规模建设涵盖多种交通形式的综合交通枢纽,显著提升了旅客出行、换乘的便捷性。但由于交通枢纽客流密集,小汽车接驳数量逐年增长,停车困难问题日益突出[1]。
因停车场内部空间复杂,很多车位存在长期空置的问题,未得到充分利用,而车主进入停车场后,往往会被立柱与车辆阻碍视线,无法提前发现空余车位,导致其耗费较长时间在场内盲目寻找,造成停车场内的交通拥堵。车主在返回停车场取车时,由于场内空间大、标志物和空间环境相似,无法及时找到停车位置,为此耗费大量时间在停车场内寻车,降低出行体验[2]。
本文采用车辆识别、三维全景建模、轨迹跟踪、人像识别等技术,提出了综合交通枢纽智能停车系统,有效提升停车场管理效率,降低运营成本,为车主提供便捷、智能的停车体验。
1 核心技术
为方便旅客停车、寻车,需对交通枢纽的停车场进行三维全景建模,判定停车场中的车位状态及各车辆的位置情况;再对用户车辆进行识别,获取车辆类型、车牌号码等信息来判定用户查找的车辆位置;通过人性化的导航方式,引导旅客找到空闲的停车位或所查询的车辆。
1.1 车辆识别与车位关联
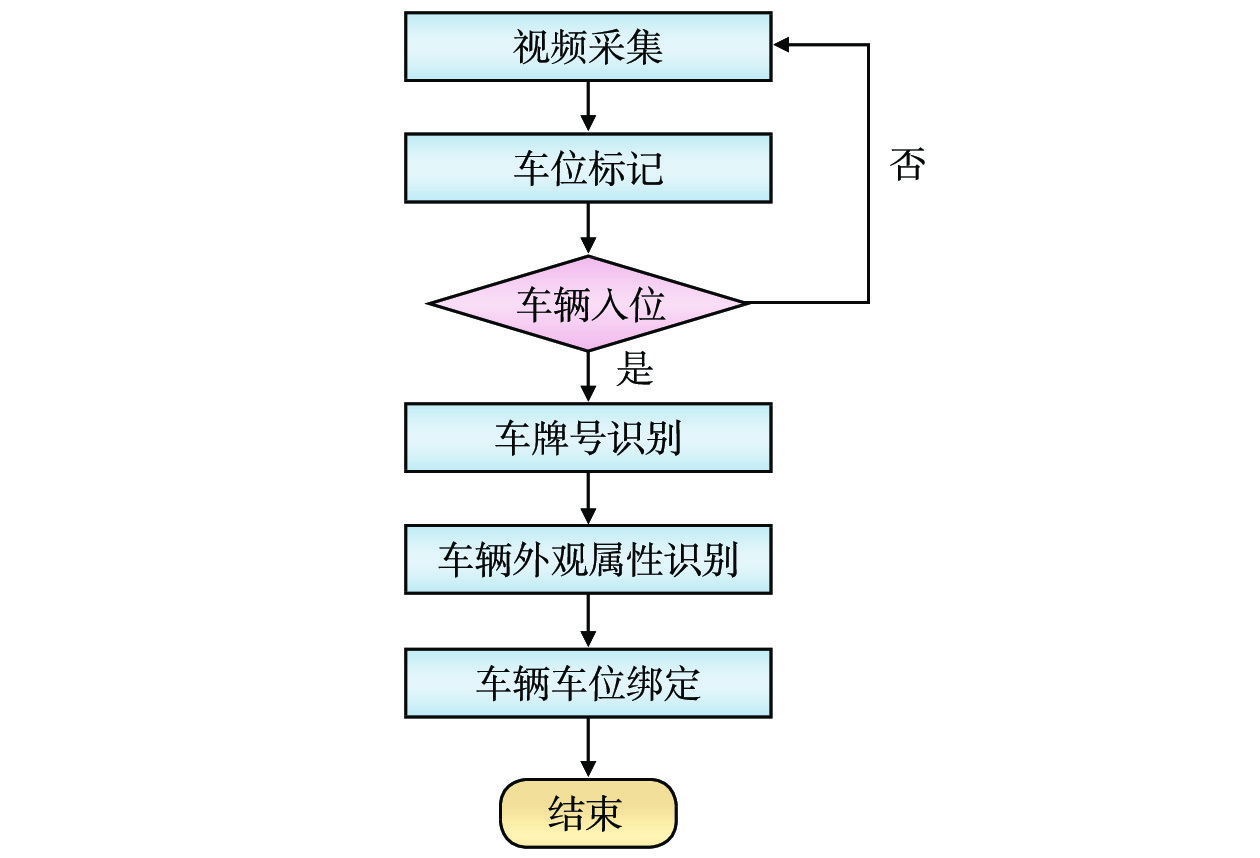
车辆识别与车位关联的流程,如图1所示。
在综合交通枢纽停车场采集的视频中标记出停车场的区域位置及停车位编号。当车辆进入停车场后,视频采集到含有车辆的画面时,通过车辆入位算法,分析其是否在停车位中。如果车辆在车位中,系统对画面中车辆的车牌号和外观进行识别,并绑定车牌号与车位编号,从而完成车辆与车位的关联。
1.1.1 车辆入位检测算法
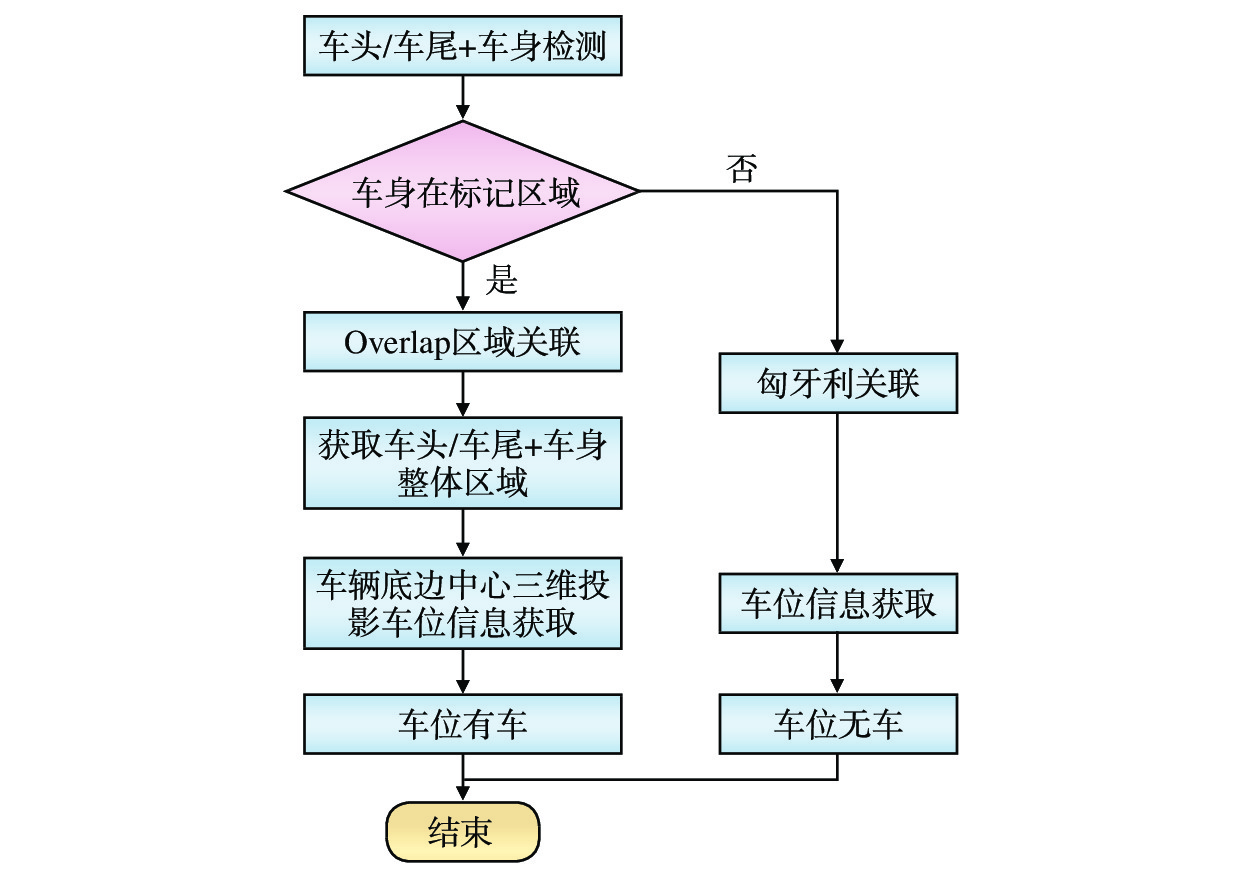
本文设计一套车辆入位检测算法流程,如图2所示。
该算法核心在于检测车辆是否进入车位,本文采用Retinanet[3]作为基础检测框架,利用backbone[3]和anchor[4]对数据进行增强、优化、匹配。检测任务采用CIoU [3]作为损失函数,公式如下:
LCIoU=1−IoU+RCIoU (1) RCIoU=ρ2(B,Bgt)c2+αυ (2) v=4π(arctanwidegthgt−arctanwideh)2 (3) α=v(1−IoU)+v (4) 其中,IoU是交并比,指产生的候选框与原标记框的交叠率,即它们的交集与并集的比值;
RCIoU 为CIoU损失函数的惩罚项;LCIoU 为CIOU 损失值[3];α 为正向的权衡参数;ρ2 为欧式距离;v 为测量横纵比的一致性;c为图中两车辆检测框的对角线长度;B为检测的目标边界框大小;wide为目标边界框宽度,h为目标边界框高度;gt为真实标注的目标边界框。为了克服无法精确定位的问题,本文利用检测器分别检测车身、车头、车尾3部分,对非标记区域的车辆采用匈牙利算法进行车位信息关联,对标记区域的车辆,利用overlap区域关联方式进行车位匹配,并以车头、车位、车尾的优先级进行关联,将检测到的目标投影到三维图中进行车辆定位。
1.1.2 车牌号识别
本文采用光学字符识别(OCR,Optical Character Recognition)方法对车牌号码进行识别[5]。为快速准确地识别车牌号,采用DenseNet[6]网络结构,使该模块可在摄像头等边缘设备上流畅运行。为避免传统车牌识别中的字符分割、字符识别等繁琐的识别流程,本文采用CTC-Loss[6],可端到端地进行车牌号识别训练和测试。
1.1.3 车辆外观属性识别
车辆外观属性识别是针对车辆类型、品牌、颜色等属性的识别。本文采用Resnet作为图像特征提取模块,用Circle-Loss和Softmax-Cross-Entropy-Loss作为模型训练时的损失函数。
Circle-Loss可使不同类型、品牌的车辆特征差距增大,同一类型、品牌的车辆特征差距缩小,从而较好地区分车辆的外观属性,提升准确率,公式如下:
Lcircle=log[1+K∑i=1L∑j−1exp(γ(αjnsjn−αipsip))] (5) 其中,
γ 为尺度因子;K为正样本个数,即车辆图像品牌类型一致的样本个数;L为负样本个数,即图像品牌不一致的样本个数;sip 为第i个同类样本对的相似性得分;sjn 为第j个不同类样本对的相似性得分;αjn 为第j个负样本对的系数;αip 为第i个正样本对的系数。Softmax-Cross-Entropy-Loss对车辆颜色分类,使不同颜色车辆的特征差距更大[7],从而区分车辆的不同颜色,公式如下:
Lsoftmax=−1NN∑i=1logeWTyixi+byi∑nj=1eWTjxi+bj (6) 其中,w为权重矩阵;N表示总的样本个数;
yi 为第i个样本的类别标签;b为偏置;xi 为第i个样本的特征。1.2 三维全景建模
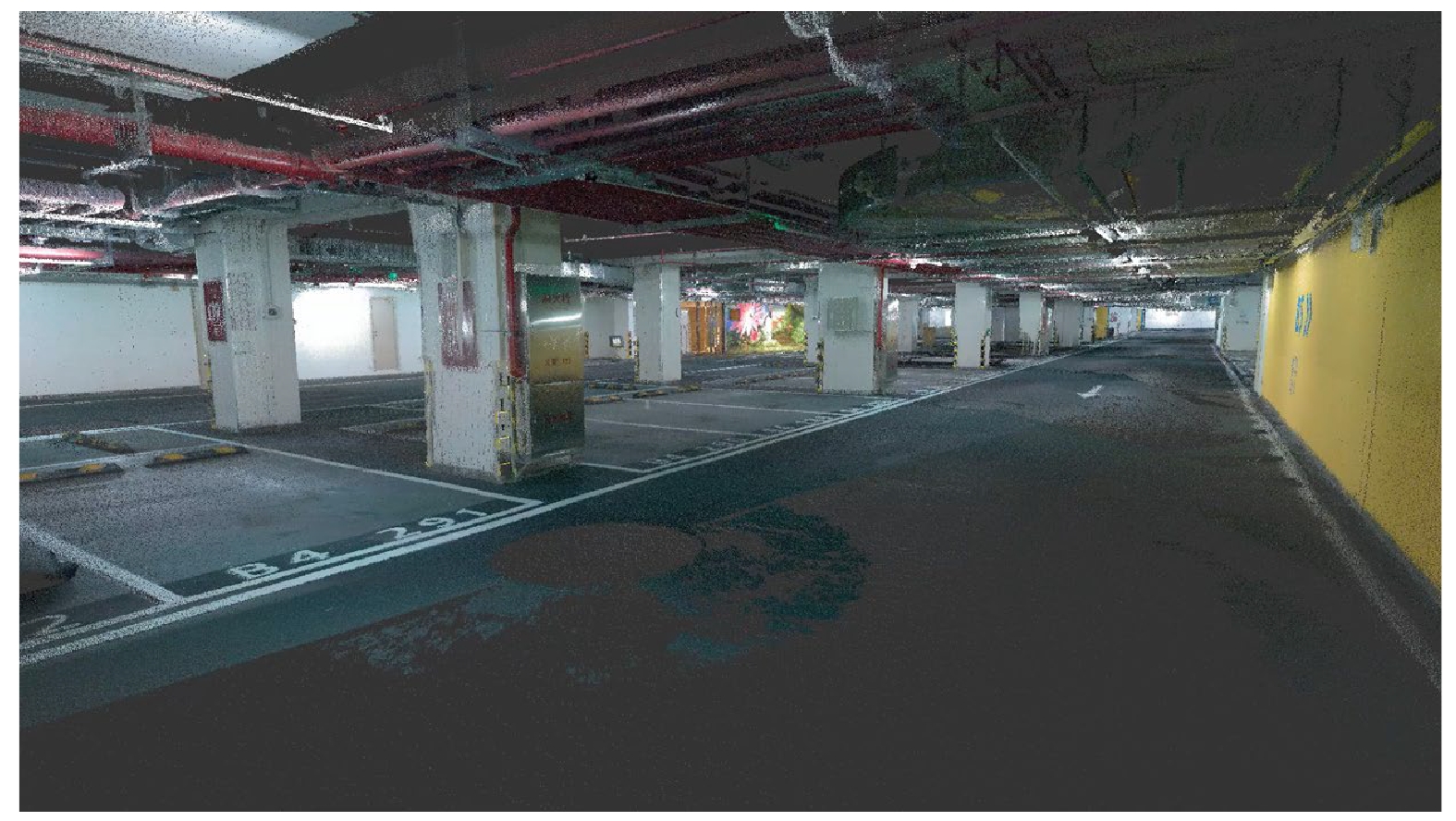
本文基于数字孪生的三维场景建模技术,利用激光雷达、惯导、轮速计、AI相机等设备对停车场进行三维场景重建。采用多传感器融合、图像优化等技术进行定位、数据矫正,自动获取激光雷达在运动过程中的位置,通过激光slam算法,根据位置[8],对运动中采集的多个局部激光扫描点云信息进行匹配处理,实现对停车场大空间场景的自动化拼接、自动建模,形成厘米级精度的停车场三维模型。
通过三维空间模型的三维坐标信息与对停车场大规模物理空间场景的连续图片进行纹理自动拼接融合后,形成720°停车场全场实景信息,如图3所示。
1.3 移动端室内导航
移动端基于iBeacon,通过三角定位得到用户的位置,并结合步行者航位推算(PDR,Pedestrian Dead Reckoning)定位,使位置信息更加精准[9]。单一的iBeacon定位噪声波动大,单一的PDR定位易产生累积误差,两者融合起来,相互之间优势互补,当出现部分环境信号缺失或部分传感器不兼容时能够相互补充,使得定位精度更高,定位稳定性更强。
2 系统设计
2.1 系统架构
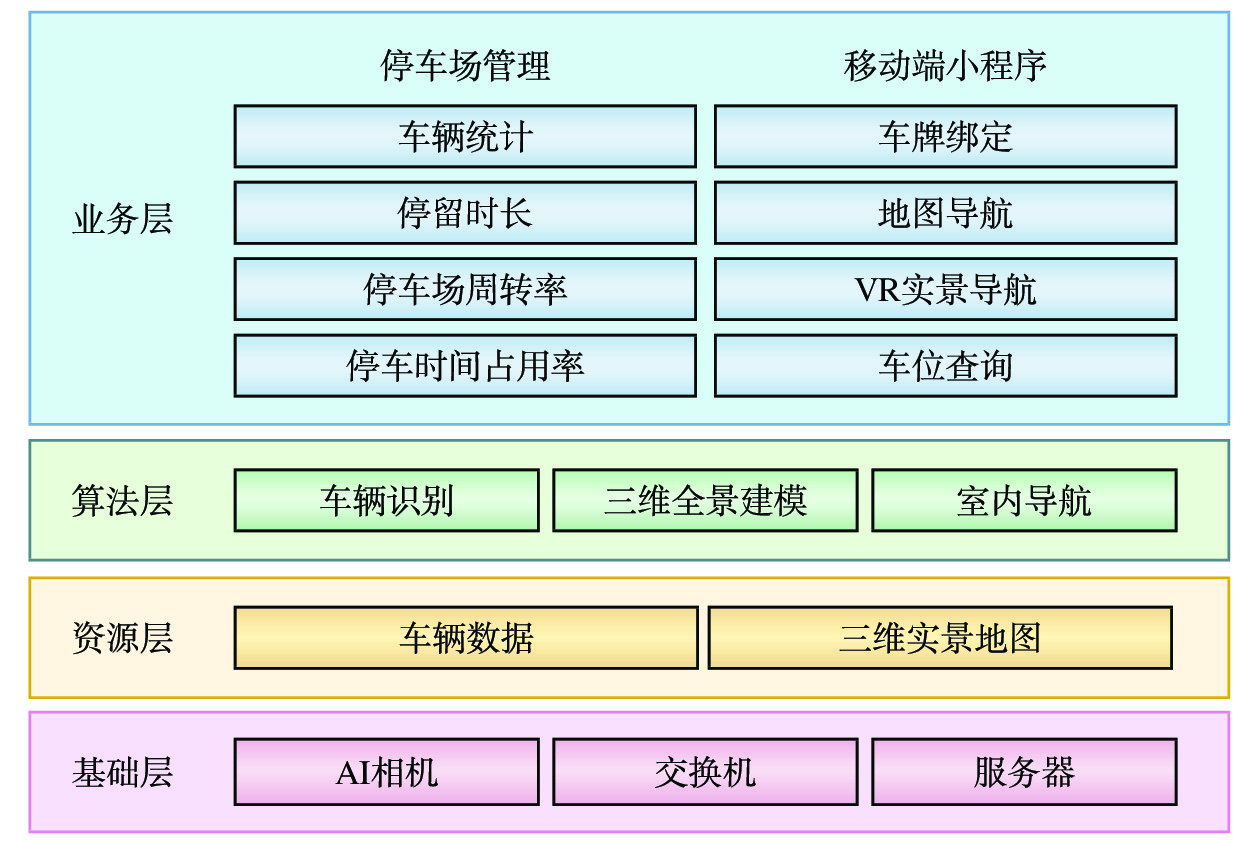
综合交通枢纽智能停车系统架构如图4所示,包括基础层、资源层、算法层、业务层。其中,基础层包括AI相机、交换机、服务器等,实现对车辆信息的采集、处理、存储及查询;资源层包括车辆数据、三维实景地图等;算法层包括车辆识别、三维全景建模、室内导航;业务层包括停车场管理模块、移动端小程序。
2.2 网络架构
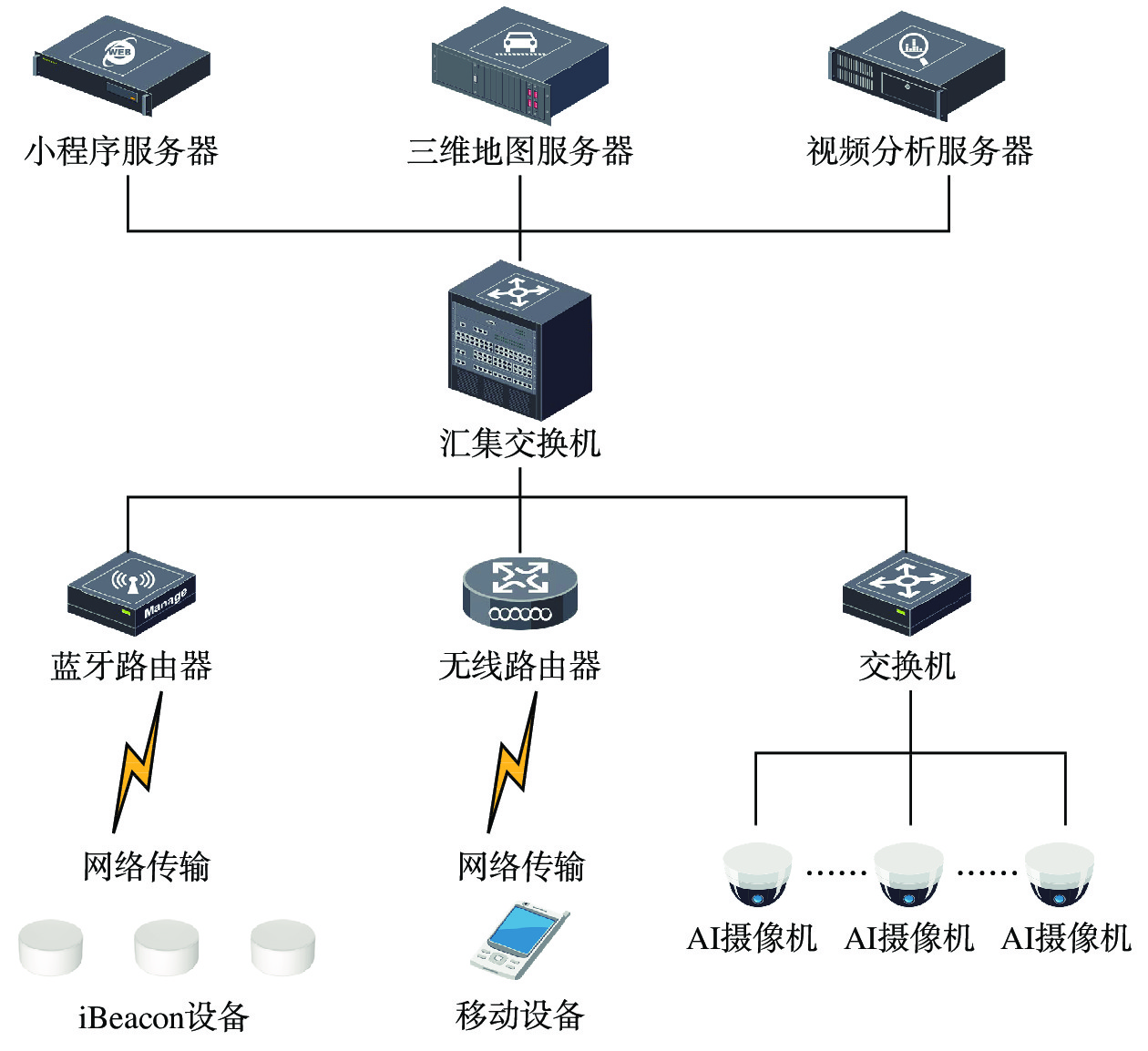
综合交通枢纽智能停车系统主要由视频分析服务器、三维地图服务器、小程序服务器组成。三维地图服务器负责停车场三维实景信息的管理与发布;视频分析服务器负责对AI相机采集到的车辆视频进行分析,生产车辆结构化数据;小程序服务器负责移动端的服务收发及定位导航功能,综合交通枢纽智能停车系统网络架构,如图5所示。
2.3 系统功能
2.3.1 停车场管理模块
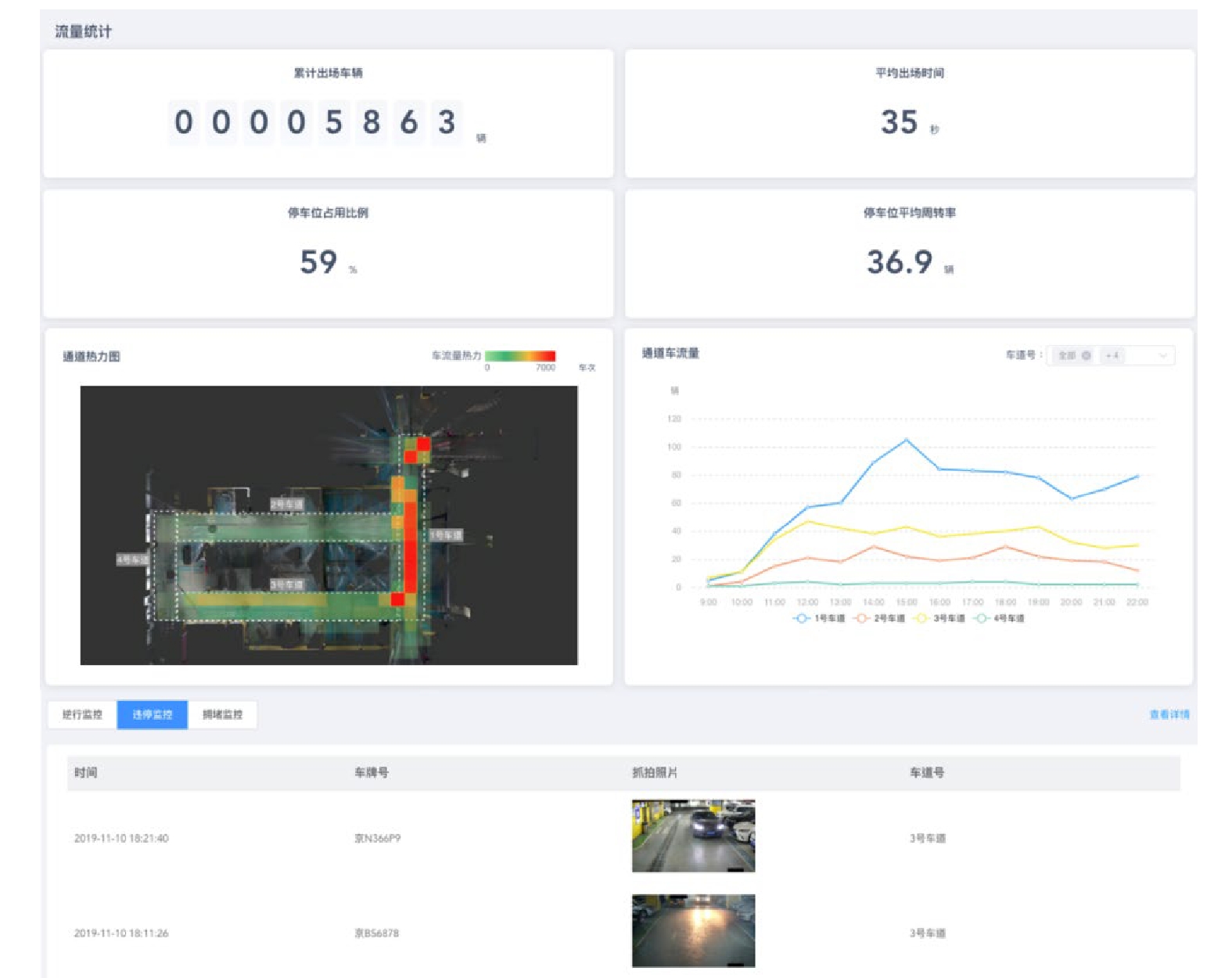
停车场管理模块可对停车场累计进出场车辆、平均出场时间、停车场占用比例、平均周转率等进行分析;对通道逆行车辆、违停车辆、车辆拥堵等事件进行精准识别、抓拍、记录、统计,包括发生时间、车牌号、抓拍照片、车道号等,界面如图6所示。
2.3.2 移动端App
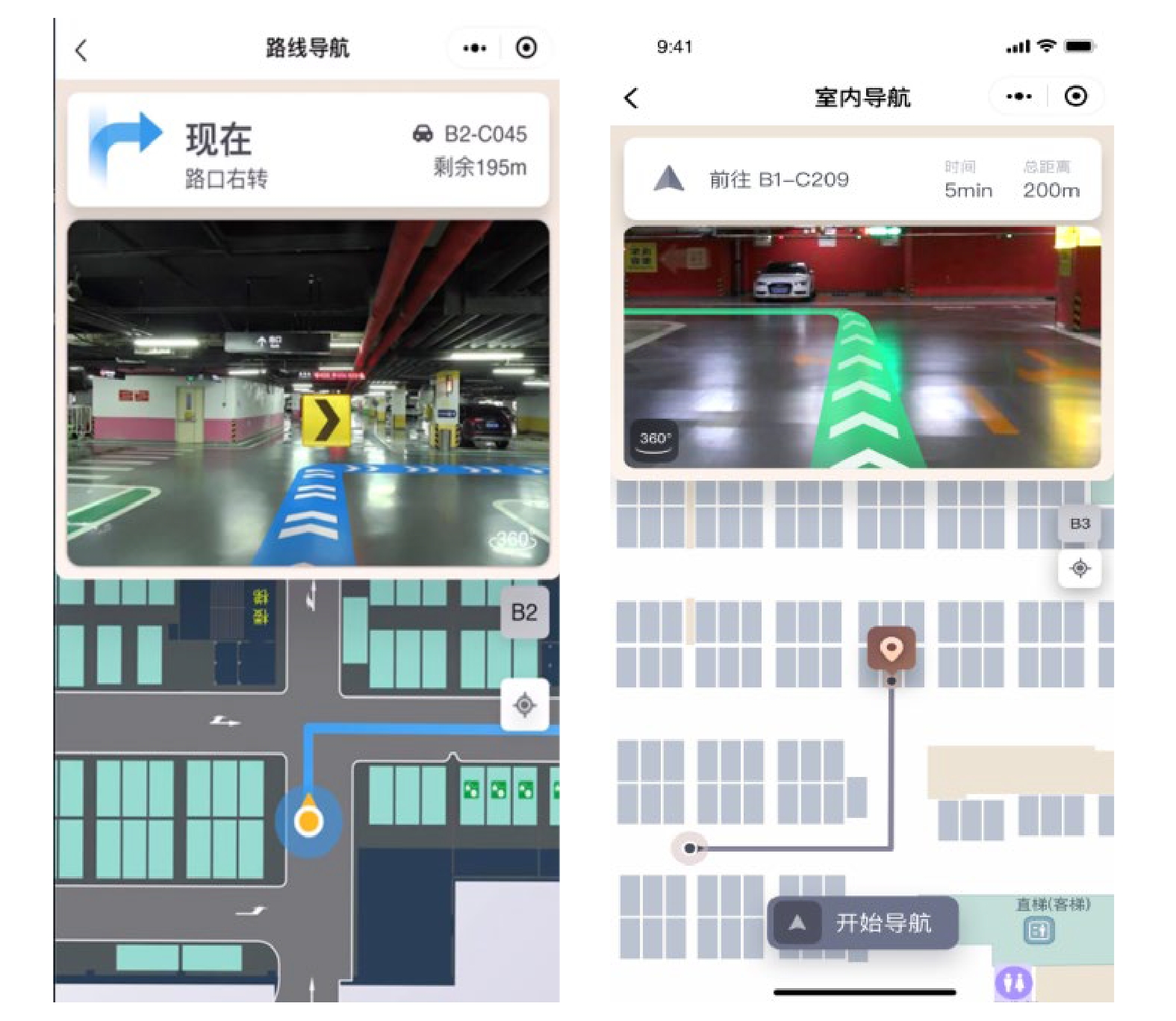
移动端App通过手机、平板等移动设备获知用户精准定位,为用户提供剩余车位正向引导及寻找车辆车位的导航功能,界面如图7所示。
系统基于移动设备获取iBeacon、Wi-Fi等物理场信号及用户行走距离、方向等信息,通过多传感器融合滤波算法,实现各传感器数据的优势互补,最终实现对用户的高精度定位[10]。移动端App通过获取空余车位信息,并基于用户的定位信息,为用户提供剩余车位的实景导航、地图导航功能。其反向寻车功能可为用户提供寻车的实景导航、地图导航。
3 结束语
本文梳理了综合交通枢纽停车场的各项问题与难点,针对车位引导难、反向寻车难等问题提出了综合交通枢纽智能停车系统,通过综合运用车辆识别、三维全景建模、移动端室内导航等技术,实现空余车位实时引导、智能寻车等功能,提高了停车场的车辆周转率和管理水平,盘活现有停车资源,降低运营成本,同时优化了用户停车体验。该系统仍需不断完善,实现停车场人车大数据分析及与其他业务系统的协同是今后研究的重点。
-
[1] 陈厚仁,蔡延光. 智慧城市停车场系统的研究与实现 [J]. 工业控制计算,2017,30(3):55-57. [2] 陈章斌. 全视频智慧停车场研究与设计 [J]. 九江学院学报(自然科学版),2015(4):67-69. [3] 张明慧,史小辉. 城市智慧停车解决方案及应用实践 [J]. 物联网技术,2020(4):36-40. [4] 李永坤. 基于微服务架构的智慧停车场系统设计 [J]. 信息与电脑(理论版),2018(2):62-63. [5] 张玮玮,钱中阳,崔袁丁. 城市智慧停车系统关键技术研究 [J]. 建筑电气,2019(5):22-25. [6] 徐彩云. 图像识别技术研究综述 [J]. 电脑知识与技术,2013(10):2446-2447. [7] 马 蓓,张 乐. 基于纹理特征的汽车车型识别 [J]. 电子科技,2010(2):94-97. DOI: 10.3969/j.issn.1007-7820.2010.02.028 [8] 翟乃斌,苏 建,宋年秀,等. 基于不变矩的机器视觉车辆类型识别技术 [J]. 武汉理工大学学报(信息与管理工程版),2007(4):7-10. [9] 景 辉,阎志远,戴琳琳,等. 基于Faster R-CNN的人脸识别算法研究 [J]. 铁路计算机应用,2019,28(10):8-11. DOI: 10.3969/j.issn.1005-8451.2019.10.003 [10] Lin T Y, Goyal P, Girshick R, et al. Focal Loss for Dense Object Detection [J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017(99): 2999-3007.
-
期刊类型引用(4)
1. 张业鑫. 基于数字孪生的城市智慧停车场实践分析. 智能城市. 2025(01): 29-31 .  百度学术
百度学术
2. 胡宝玲,甄力,孙伟. 智慧城市背景下基于动态资源分配的智能停车系统研究. 信息与电脑(理论版). 2022(04): 4-6 . 百度学术
3. 杨航,朱建华,黄文,何建国,张云飞. 基于SolidWorks的立体停车系统有限元分析. 科技与创新. 2022(10): 94-98 . 百度学术
4. 翟爱民. 基于物联网的智能停车诱导系统研究与分析. 华东科技. 2022(08): 117-119 . 百度学术
其他类型引用(1)
 下载:
下载:


















计量
- 文章访问数: 133
- HTML全文浏览量: 241
- PDF下载量: 35
- 被引次数: 5
