

Design and implementation of infrared recognition gate control system
-
摘要:
针对闸机通行逻辑算法数据处理复杂、实时性差等问题,设计红外识别闸机控制系统。该系统集成了通行逻辑、闸门控制、声光报警等功能;引入红外传感识别技术,结合旅客通行事件集,优化闸机通道传感器布局;基于位置识别思想,设计通行逻辑算法;采用32位Advanced RISC Machine(ARM)微控制器,作为主控芯片。在国家铁路多个客运车站应用的结果表明,该系统误报率低,旅客行为检测精准,通行效率高,验证了其可靠性与实用性。
Abstract:This paper designed an infrared recognition gate control system to address issues such as complex data processing and poor real-time performance of the gate traffic logic algorithm. The system integrated functions such as traffic logic, gate control, sound and light alarm, etc. Combining with passenger traffic event sets, the paper introduced infrared sensing recognition technology to optimize the sensor layout of the gate traffic, based on the idea of location recognition to design a traffic logic algorithm, and used a 32-bit Advanced RISC Machine (ARM) microcontroller as the main control chip. The results of application in multiple passenger stations of the national railway show that the system has a low false alarm rate, accurate passenger behavior detection, and high traffic efficiency, which verifies its reliability and practicality.
-
随着我国铁路快速发展,车站客流量不断提升,高峰时段检票进站场景愈发复杂,铁路实名制检票闸机已经成为车站疏通现场人流、减轻工作人员压力的重要设备[1]。闸机是融合计算技术、自动化技术、电气控制及机械设计于一体的智能化集成设备,通过旅客身份核验及通道内人体行为识别状态,下发开闸指令,快速精确控制闸门及全方位监控乘客通行事件,进而实现自动检票。闸机通行逻辑算法用于检测通道行人当前位置与运动状态,是整机设备的核心。目前,国内关于闸机通行逻辑算法的研究范围较广,吴琪等人[2]详细对比了基于人体特征、事件动作、神经网络等几种控制算法的应用环境和特点;王建楹等人[3]着重针对闸机人脸识别图像分析技术展开研究,对提高识别准确性起了重要作用;贺子钢等人[4]基于数字信号处理(DSP,Digital Signal Process)平台,设计了闸机控制算法,并采用面向对象的思想设计了软件系统。
上述研究中关于闸机通行控制算法的数据处理较为繁琐,并不适用于铁路实名制检票闸机的实际使用环境和需求。在保证识别准确性的前提下,为降低成本、简化算法、提高识别速度,本文设计了基于32位Advanced RISC Machine(ARM)微控制器的高速红外通行逻辑算法;基于该算法,设计了一款简单便捷、可靠高效的红外识别闸机控制系统,该系统提高了主控平台选型灵活性,符合现代化智能设备的设计理念。
1 检票闸机旅客通行事件分析
基于一次检票刷证授权仅允许一位成人通过的原则,结合通行方向、通行人数、携带物品等因素,对闸机常规通行事件进行分析研究,以便设计适用于车站检票闸机的通行逻辑算法。
1.1 正常过闸通行事件集
(1)单人单次通行事件:单人单次在设置最大通行时长范围内正常过闸,通过后正常关门,清除授权信息,置空闲状态;若超时无人通行则关门,避免影响后续通行过程。
(2)多人连续刷证通行事件:多人连续刷证间隔较短,刷证授权通过次数累加,在此过程中,闸门始终保持开启状态直至最后一位行人通过完成,闸门关闭,闸机恢复空闲状态。
(3) 单人携带物品通行事件:单人携带物品进入通道时包括物品先于身体、物品置于身后及携带大件行李等几种情况,要求识别具体,避免出现闸门误操作及误报尾随现象。
1.2 通行报警事件集
(1)未刷证闯闸报警事件:未刷证闯闸包括入口和出口两个方向的闯闸行为,当触发前后相应位置传感器后,进行声光报警,退出通道后清除报警。
(2)尾随报警事件:多人尾随通过,刷证次数小于通行人数,尾随间距大于闸机水平方向最小检测间距时进行报警,当旅客处于安全区域外时,需要关闭闸门,避免逃票事件发生。
(3)滞留报警事件:检票授权通过时行人在通道内滞留超时则报警,正常通过则清除报警,进入置空闲状态;若过程中从通道入口退出,则清除报警,保持当前闸门状态,重新开始通行过程。
(4)反闯报警事件:检票通行过程中刷卡旅客位于通道出口位置之前时出现反向闯闸则报警,旅客在安全区之外则闸门关闭。
(5)特殊逃票事件:此类事件包括暴力闯闸、两人并排通过、从闸机上方跳入、从闸机下方爬行通过等逃票行为,在保护人身安全的前提下进行特殊处理。
2 闸机通行识别技术
2.1 红外检测识别技术
红外检测识别技术依赖于人体关键点构成比例和闸机通道长度。根据调查研究显示,中国成年男子平均身高约为169.7 cm,成年女性平均身高约为158 cm[5]。结合人体构成比例,可以计算得到人体关键节点对应的高度,如表1所示,其中,H为人体头部顶点至地面的距离。传感器高度方向布局主要根据身体各个关节点的运动位移进行行为识别:踝关节对应闸机底部,膝关节对应闸机中部,肘关节对应闸机顶部区域。常用的闸机通道长度约为2 m,宽度在1~1.5 m范围内。
对人体步行通过闸机步态特征进行分析得知,人体通过闸机是由双腿并行站立到双腿交叉跨步转换的过程。据调查,中国人平均步长约为600 mm,通常需要1~2步到达闸机中央位置。因此,检测行人就是检测这一连贯的运动过程,根据人体运动时的2个主要形态,进行传感器位置布置。乘客通过闸机时,通常在通道外刷证进站,提前进入通道会提示闯闸报警。当乘客进入闸机时,第1个动作是双腿站立刷证状态,随后是跨步状态,在此过程中,应设置入通道传感器,用于乘客或物品识别;之后,乘客从站立状态向跨步状态转换,在此位置设置检测传感器,区分成人、物品或儿童。当通行高度不足设置位置时,不计入通行人数计数器。
2.2 通道传感器
闸机检测中,常用的是单点红外传感器和多点一体式光幕。一体式光幕抗干扰能力强,内部自检设计,光轴数量可调,但光轴间距固定,适应性不高;而红外传感器相互间防干涉距离大约为100 mm,抗光干扰能力强,通用性好,安装拆卸简单,便于维护,灵敏度高,性价比合适,布置更加灵活,因此,是闸机传感器的首选。除闸机上方用于人体高度检测采取漫反射的方式外,其余均采用对射型光电检测方式。红外接收传感器输出电路如图1所示,输出类型为负极—正极—负极(NPN,Negative-Positive-Negative),采用集电极开路输出方式,同时,带有灯光指示和短路保护功能,响应时间低至1 ms,满足通行逻辑检测的使用标准和要求。
3 基于位置识别思想的通行逻辑算法
3.1 通道传感器布置
闸机通行逻辑实际上是一个位置识别的过程,即行人从一个位置区域进入另一个位置区域的识别检测,是一个完整无重复的过程。位置识别思想关键在于如何在有限空间合理对传感器位置区域进行划分,构建行人进出通道位置状态机。本文将闸机通道分割成多个位置区域,通过每个位置区域对应的红外传感器确定行人位置状态变量,同时,分析入通道逻辑和出通道逻辑流程,以此获取乘客的通行行为。例如,当从通道外位置连续进入2个以上新的位置区域,经过的位置区域无重复进入,同时高度满足既定条件,即可判别有人通过。在识别算法确定的情况下,红外传感器数量与识别准确性的关系为[6]
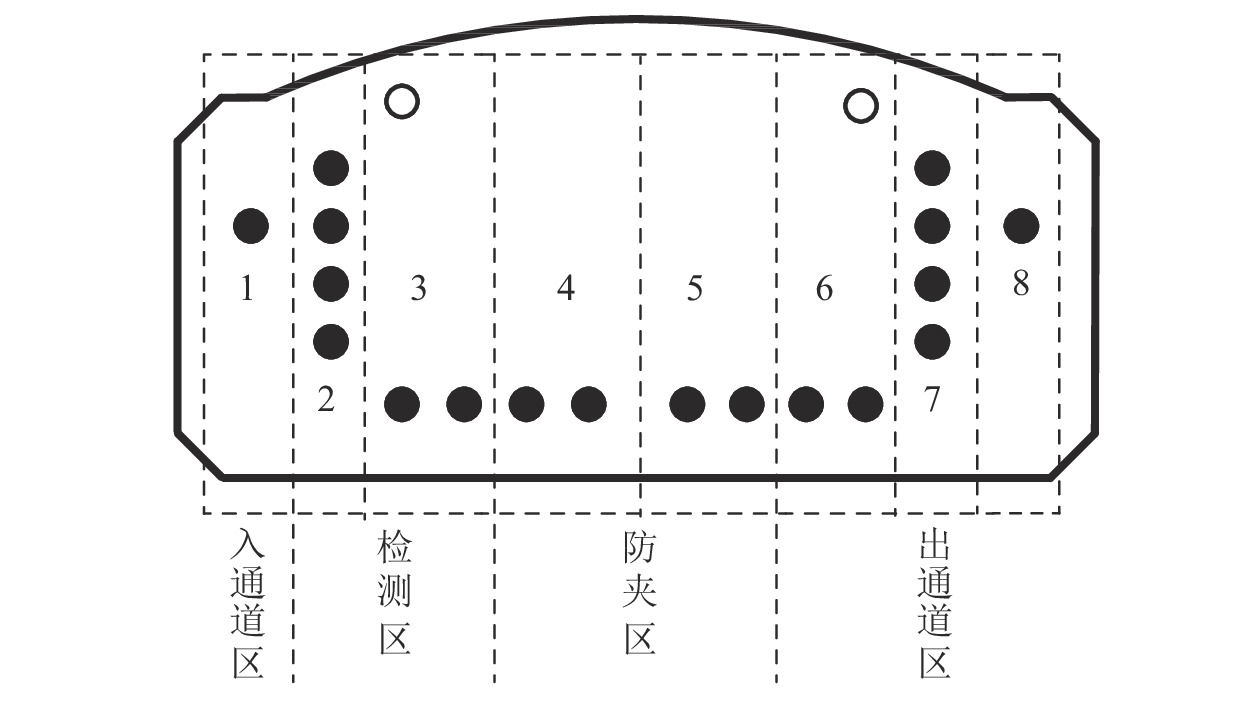
n=k×log2(1−m) (1) 式(1)中,n为传感器数量,m为识别准确度,k为经验调整系数,此变量与算法程序执行相关。传感器数量合理布置决定人体识别是否准确,本文设计的传感器布局采用20对红外传感器独立布局方式,通道完全对称,满足双向闸机的设计条件和使用要求。闸机分为入通道区域、检测区域、防夹区域及出通道区域等4个功能区域。为了通行逻辑检测方便,将其细化为8个位置分区,如图2所示。
(1)入通道区域:设置1对传感器用来判断通行方向,高度大约为成人手臂周围,沿入口方向出现两次及以上遮挡状态改变即可断定一名乘客正在通行。
(2)检测区域:在垂直方向设置4对传感器,用于乘客与行李区分以及通行人数确定。垂直传感器间距约为150 mm,可以有效减轻由于手臂摆动而造成的误判。在检测区肘关节高度处设置漫反射身高传感器,光信号发散可以弥补对射传感器作为身高检测的安装高度要求,若传感器未接收到信号,判定为儿童、物品或有意逃票行为,一般出于安全考虑会设定为合法行为,不叠加通行人数,不报尾随。
(3)防夹区域:位于拍打门工作范围内,乘客位于此区域时,无论当前通行状态是否为闯闸或者尾随,均应触发防夹检测,及时设置急停锁离合模式,避免拍打门对人身安全造成影响。
(4)出通道区域:通过6、7位置传感器进行逻辑判定,判定通行结束则对通道内人数递减,同时,置位一次通行完成标志,进行出通道处理[7-8]。
3.2 人员正反向通行位置确定
根据行人通行方向将闸机通行行为分为正向进入、正向退出、反向进入、反向退出等几种情况,结合通道传感器布局,对人员正向通行位置状态机进行分析,图2中各个位置区域对应不同的人员正向通行位置变量Sn,进入通道前位置对应S0,状态变量值为000,则
{S1=001S2=010......S7=111 (2) 从通道起始位置开始依次判断每个区域对应传感器的遮挡情况,可以得到图3所示的正向通行位置状态机。图3中,!代表未遮挡状态,当遮挡入通道区传感器时,即图3中的区域1条件满足,位置状态变量加1;当遮挡垂直排列的4对红外传感器时,区域2条件满足,位置状态变量再加1;若区域1和区域2对应传感器均未遮挡,则位置状态变量减1,逐级判断,位置状态变量值即可确定当前正向通行人员的准确位置。依此逻辑类推,反向人员通行位置同样可以准确获取。
3.3 通行逻辑流程
对整体通行逻辑流程进行分析,闸机红外通行逻辑算法每1 ms执行1次,主要包括系统状态查询、刷证信号处理、红外通行逻辑任务处理、报警状态检查、门控信号处理及安全防夹检测等函数体处理模块。
(1) 状态查询:判断当前通行处于何种状态,主要包括老化测试、空闲、刷证通行、火警常开、自由通行、找零设零、掉电开闸等。
(2) 刷证信号处理:负责接收上层下发的刷证消息并进行当前授权信号统计。
(3) 红外通行逻辑任务处理:主要完成无人通行处理、人员正反向位置确定、进入通道及退出通道逻辑处理、通道人数确定几项工作。
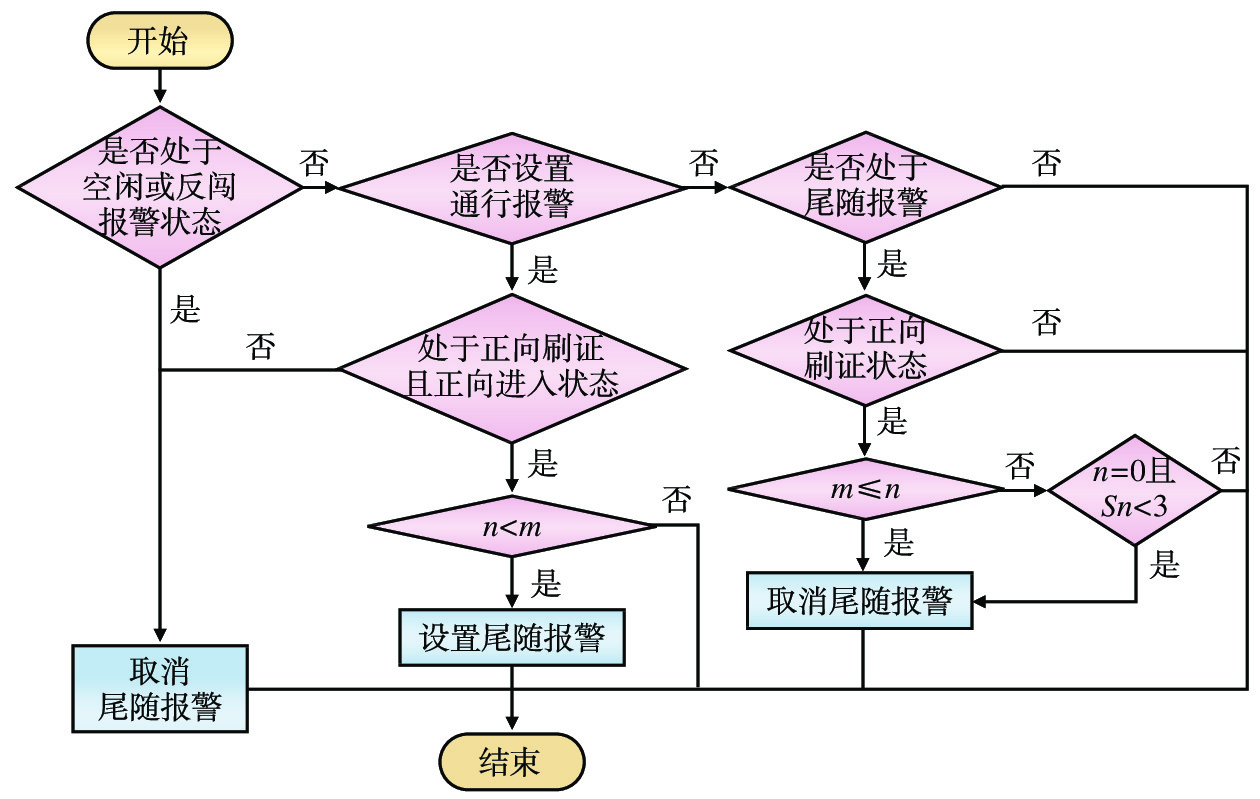
(4) 报警状态检查:完成未刷证闯闸、尾随、滞留、刷证反向闯闸等非法事件的监测,图4给出了尾随报警流程处理方法。图4中,m为刷证通行时通道内人数,n为刷证次数,Sn为正向通行位置变量;空闲状态是不报尾随的,并且,反闯报警优先级要高于尾随报警;在正向刷证状态下,当通过闸机机头垂直方向传感器区域时,检测到通道人数不合规则时尾随报警;当尾随人员退出通道时(m≤n)或当通道最后一个合法通行人员通过机尾后且尾随行人正向通行位置处于通道设定位置之前时,取消尾随报警。
(5) 门控处理:根据获取到不同的门控消息进行信号处理,下发命令到电机驱动器,完成正反向开关门和离合控制操作。
(6) 防夹检测:根据宽窄通道的长度差异设置不同的红外感应区域。当检测到防夹区有人时,离合器迅速执行上锁操作,响应吸合时间为毫秒级,保证乘客在拍打门工作范围内不被误伤,安全性得到有效保障。
4 系统设计
4.1 主控芯片
考虑国产化、性能、成本、功耗和集成度等因素,选取高级精简指令集计算机(ARM,Advanced RISC Machine)内核的32位GD32F303系列通用微控制器作为红外识别闸机控制系统的主控芯片,芯片内部架构如图5所示,多达80个通用输入/输出(I/O,Input Output)接口,具有丰富的外设资源。高密度闪存存储容量为256 K,满足闸机控制程序存储需求;支持嵌入式引导程序通过串口更新FLASH方式;最高运行速度可达到120 MHz;同时,芯片拥有成熟的外设库函数,调用方便,显著降低程序开发的难度。
4.2 硬件架构
围绕闸机主控单元,构建红外识别闸机控制系统硬件架构,如图6所示。
(1) 上层数据通信部分:工控机通过异步串口通信与闸机控制单元进行数据交互,主要完成控制命令下发、参数设置、状态获取、报警灯控等任务。
(2) 驱动器控制部分:主控单元向下通过控制器局域网络(CAN,Controller Area Network)接口完成对主从驱动器的电机控制和状态检测,不仅数据传输速率高达125 Kbit,而且一主多从的通信架构可以实现对主从机的驱动器参数设置,有效解决宽窄通道任意切换的问题。
(3) 闸机底层外设资源部分:通过I/O信号驱动场效应管控制发射传感器电源通断,以此方式排查传感器故障;遥控器采用红外网络控制设备(NEC,Network Equipment Control)协议编码,解码信号通过串口传输至主控单元进行数据处理;通过I/O信号驱动24 V输出实现顶部状态灯、前后导向屏、蜂鸣器的状态报警功能;紧急信号使用干接点方式控制闸门常开,同时,通过继电器输出反馈信号到应急管理单元。
依据通行逻辑算法,进行闸机通行测试,如表2所示。根据通行人数(单人、双人、多人)和通行速度(低速、常速、快速)进行分类测试,包括空闲及通行状态正反向闯闸、刷证无人通过及正常通过、通行状态下位于闸机不同位置滞留通道、通行状态下滞留通道并从入口退出等几项实验内容,经验证此控制系统执行所有动作均与设计保持一致。
表 2 闸机通行测试用例实验
分类实验标题 前置
条件操作步骤 预期结果 实际
结果单人
低速空闲状态
正向闯闸不发通行
指令从正向传感器外进入通道,
直到闸门位置,逗留3秒后
退出通道正向闯闸报警;闸门不开启 测试
一致双人
低速通行状态下正向
通行发通行
指令1次从正向传感器外进入通道,
直到走出通道或被闸门挡住尾随报警;闸门立刻关闭,无法通行 测试
一致... ... ... ... ... ... 5 现场应用
本文研发的红外识别闸机控制系统已在中国铁路成都局、上海局等集团公司的多个车站应用。以分布于候车厅与站台连接区域的闸机设备为依托,每通道配备一套通行控制系统,组成通道阵列,并作宽窄通道区分,设备配合人工的检票策略对于车站秩序管理起到关键作用,其基于国产化主控芯片的设计保障了核心知识产权自主可控。在成都东站春运客流高峰段对检票闸机通行现场进行监测,旅客多人连续刷证通行、携带行李、儿童等通行情况与预期结果一致,开/关门运行稳定,有效提升了旅客的通行体验。
6 结束语
本文根据铁路客运车站检票闸机实际通行环境,分析了旅客多种通行事件;依照闸机通道长度、人体关节点高度、识别准确度与传感器数量关系,结合传感器技术,布置通道传感器;在ARM微控平台下,自主研发嵌入通行逻辑算法的低成本红外识别闸机控制系统,其中,通行逻辑算法的核心思想是位置识别,数据处理量小,识别速度可以达到毫秒级,解决了以往采用图像检测技术带来的检测过程较复杂问题。车站现场测试结果表明,此通行逻辑算法简单高效,可实时获取闸机当前状态与报警情况,防尾随和安全防夹能力均可达到高峰段使用标准。目前,有些特殊事件闸机还不能精确识别,未来,我们将深度融合图像识别技术,进一步完善本系统,提升闸机的安全性和通行效率。
-
表 2 闸机通行测试用例
实验
分类实验标题 前置
条件操作步骤 预期结果 实际
结果单人
低速空闲状态
正向闯闸不发通行
指令从正向传感器外进入通道,
直到闸门位置,逗留3秒后
退出通道正向闯闸报警;闸门不开启 测试
一致双人
低速通行状态下正向
通行发通行
指令1次从正向传感器外进入通道,
直到走出通道或被闸门挡住尾随报警;闸门立刻关闭,无法通行 测试
一致... ... ... ... ... ...  下载: 导出CSV
下载: 导出CSV
-
[1] 王晓冬,戴建强,姜 利,等. 铁路实名制验证检票方案研究[J]. 铁路计算机应用,2014,23(3):27-29,36. [2] 吴 琪,李凯旋,耿 伟,等. 闸机通道控制算法研究[J]. 河南科技,2022,41(16):23-27. [3] 王建楹,胡扬超. 基于人脸识别的智能闸机系统设计[J]. 自动化技术与应用,2021,40(1):101-104,113. [4] 贺子钢,包建东. 基于DSP的闸机控制技术[J]. 机械制造与自动化,2014,43(4):164-166. [5] 刘月姣. 《中国居民营养与慢性病状况报告(2020年)》发布[J]. 中国食物与营养,2020,26(12):2. [6] 罗 煌. 地铁闸机通行逻辑控制的设计[J]. 城市轨道交通研究,2014,17(11):70-74. [7] 罗富章. 车站自动检票闸机控制系统研究[D]. 南昌:东华理工大学,2022. [8] 徐 炜. 基于人体行为检测及识别的闸机通行控制研究[D]. 南京:东南大学,2020.






计量
- 文章访问数: 53
- HTML全文浏览量: 19
- PDF下载量: 22
