

Multi-functional passenger service robot applied to railway passenger station
-
摘要: 基于目前铁路客运发展趋势和旅客服务需求,提出将服务机器人和人工智能技术结合应用于铁路旅客服务系统的解决方案, 概述多功能旅客服务机器人架构、应用服务场景设计,总结其实现中所采用的自主导航定位、降噪、既有设施设备物联等关键技术。多功能旅客服务机器人通过语音交互、触控交互、远程控制等多种控制交互方式,结合铁路既有固定基础设施及内外部环境信息的全面感知、设备互联和融合处理,具备与闸机、电梯、爱心通道、安全门等设备物联能力,集成人脸核验、开停检信息提醒、移动视频监控、移动验检票等设备功能,实现与铁路相关系统的互联互通和信息的集成共享,解决既有旅客服务中信息孤岛的问题,为旅客提供更加信息化、自动化、智能化的服务。Abstract: Based on the current development trend of railway passenger transportation and passengers’ needs, this paper proposed a solution to apply the service robot and artificial intelligence technology to the railway passenger service system, summarized the architecture of multi-functional passenger service robot, the design of application service scenario, and the key technologies used in the implementation of the system, such as autonomous navigation and positioning, noise reduction, and the connection of existing facilities and equipment. Through voice interaction, touch interaction, remote control and other control interaction methods, combined with the comprehensive perception, equipment interconnection and fusion processing of the existing fixed infrastructure and internal and external environmental information of the railway, the multifunctional passenger service robot has the ability to connect with the gate, elevator, love channel, safety door and other equipment, and integrates face verification, start and stop inspection information reminder mobile video monitoring, mobile ticket inspection and other equipment functions to achieve interconnection with railway related systems, information integration and sharing, solve problems of information islands in passenger services, and provide passengers with more information-based, automated and intelligent services.
-
随着人工智能和物联网技术的不断发展,作为一种智能硬件,服务机器人产品将通过与软件加深融合的方式对传统设备进行智能化改造,不断实现更为强大的功能和更为广泛的应用场景。作为物联网生态系统中的信息交换中枢,服务机器人还将借助互联网和云技术为其他联网设备提供随时、随地的信息输入,并通过人工智能技术进一步代替用户对其他联网设备进行自主操控,为用户提供智能化服务[1]。
北京—张家口高速铁路(简称:京张高铁)是目前我国数字化、信息化、智能化水平较高的铁路,也是服务2022年北京冬奥会和冬残奥会(简称:冬奥会)的重要交通基础设施之一,将为北京、延庆、张家口3地赛区提供高品质、高安全性、高科技含量的冬奥会交通服务[2],满足多国运动员、媒体、观众等在冬奥会期间的出行需求。本文通过模块集成、软件融合,将服务机器人与铁路既有数据相结合,以实现更为强大的服务功能,拓展应用场景[3]。
1 多功能旅客服务机器人概述
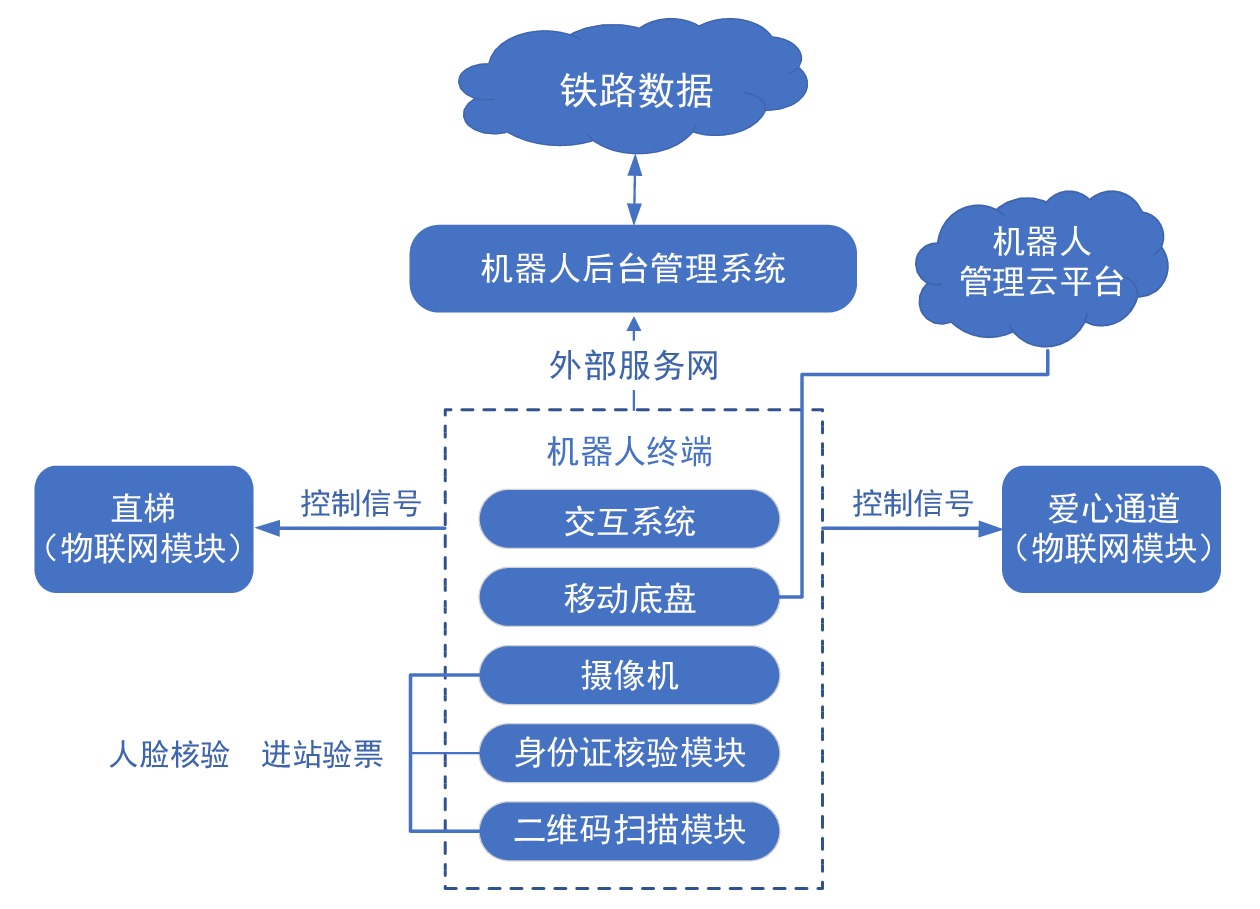
多功能旅客服务机器人包含人机交互系统和移动底盘,同时搭载人脸识别摄像机、身份证核验模块和二维码扫描模块。人机交互系统通过铁路外部服务网与机器人后台管理系统进行数据交互及联动,实现问询、语音交互、站内导航、迎宾导引等人机交互及展示[4];移动底盘结合激光避障、超声波、3D摄像头、碰撞传感器等多传感器模块,实现机器人的移动、避障、自主回充及调配多机器人交通策略,通过结合物联闸机、爱心通道,可远程控制闸机开关、直梯呼叫,实现旅客无感进站,减少旅客操作及物体接触;多功能旅客服务机器人搭载人脸识别摄像机,接入铁路视频监控系统,可通过后台控制提供移动视频监视服务,同时结合身份证核验模块、二维码扫描模块,通过前端采集用户身份信息,与后台管理系统比对,实现人脸核验、进站验票的功能,架构如图1所示。
2 多功能旅客服务机器人功能
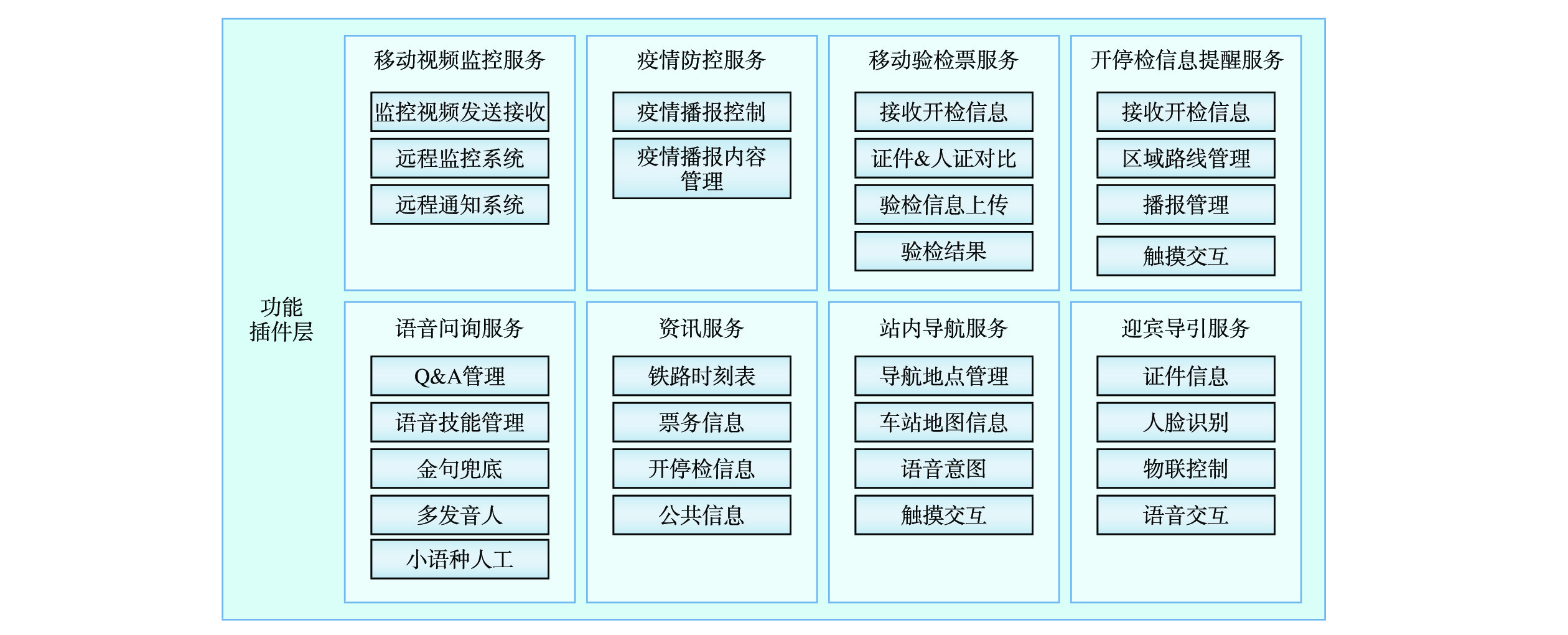
多功能旅客服务机器人功能架构,如图2所示。
2.1 资讯服务
旅客可通过多功能旅客服务机器人获取铁路相关资讯及公共资讯。多功能旅客服务机器人能够帮助旅客查询铁路时刻表、票务信息、开停检信息、站内设施信息、天气信息、冬奥赛事信息、周边地标等,通过预先配置的交互流程和知识库向旅客展示及交互。旅客可通过终端人机交互界面、语音交互或自定义讲解的方式获取各种资讯服务。
2.2 语音问询服务
多功能旅客服务机器人处于待机状态时,旅客可通过人脸识别、触摸屏幕和语音唤醒3种方式对机器人进行唤醒。当多功能旅客服务机器人被唤醒时,通过扬声器阵列、头部跟踪、视觉跟踪技术定位旅客,转向唤醒方向,播报欢迎语,并且针对VIP旅客提供个性化欢迎语及打招呼方式[5]。语音交互过程中,多功能旅客服务机器人通过语音播报、屏幕演示的方式对旅客问题作出答复,当遇到无法识别的语句时,播报“兜底金句”并引导旅客使用屏幕菜单触摸交互方式解决问题。技能问答可选择触发机器人讲解、引领任务,帮助解决旅客问询,拓宽旅客资讯服务获取渠道。
2.3 站内导航服务
旅客可通过多功能旅客服务机器人获取车站站内设施信息及候车引导信息,选择相应导航点位获取导航路线,通过预先配置的交互流程向旅客展示及交互,并通过物联爱心通道、闸机的方式,带领旅客通过人脸核验,乘坐直梯到达指定点位。
2.4 迎宾导引服务
多功能旅客服务机器人在进站高峰时段前往进站口迎宾待机,旅客唤醒机器人后可通过人脸识别、刷身份证/护照的方式获取已购买车票的车次、开停检、检票口信息。机器人识别对象为需要帮助的老年人时,可选择触发机器人引导任务,由机器人引导旅客至相应设施点或检票口。
2.5 开停检信息提醒服务
铁路系统信息对接平台获取车站各车次信息、检票口信息、发车时间信息及开停检信息,在相应车次检票前10 min,多功能旅客服务机器人自动到达指定检票口指定区域进行巡游,播报相应车次检票提醒信息。当旅客与机器人交互时,通过扫描交互的旅客,采集人脸信息,获取旅客相应车次信息、检票口信息、发车时间信息及开停检信息并告知旅客。
2.6 移动验检票服务
在相应车次检票前2 min,多功能旅客服务机器人自动到达指定检票口,切换至检票模式。旅客可通过身份证、护照或二维码扫码验证,多功能旅客服务机器人同时抓拍旅客人脸信息并上传后台记录,推送至铁路系统信息对接平台,与票务系统信息进行比对,验证成功屏幕显示绿色通过标识,失败显示红色拒绝通过标识并进行声音报警。多功能旅客服务机器人有助于解决检票拥堵问题,降低旅客误车率。
2.7 移动视频监控服务
多功能旅客服务机器人配备接入视频监控系统摄像机,将视频图像通过5G专网实时上传铁路视频监视后台,支持后台人员操控机器人到监控死角查看。
2.8 疫情防控服务
多功能旅客服务机器人可定时播报疫情防控信息、安全宣传信息,对接铁路站内热力电子地图,当发现人员聚集情况时,前往相应区域播报防疫信息。
3 关键技术
3.1 基于环境自然导航的SLAM激光导航技术
针对高铁站现场环境复杂、人员流动大、设备设施多的情况,为解决机器人在未知环境运动时的定位与地图构建问题,多功能旅客服务机器人采用基于环境自然导航的同步定位(SLAM,Simultaneous Localization And Mapping)与建图激光导航技术,以最开始放置的位置为起点,自主扫图,结合编码器计算运动里程信息,通过自身所携带的内部传感器和外部激光传感器对自身进行定位,同时通过获取的环境信息构建现场地图;通过机器人装载的激光传感器获取的激光数据,结合观测模型对机器人位姿进行精确修正,得到机器人的精确定位;在精确定位的基础上,将激光数据添加到栅格地图中。如此反复,多功能旅客服务机器人在环境中运动,最终完成整个场景地图的构建[6]。
完成现场地图构建后,需要在构建的地图上进行设备设施打点及机器人运动路径规划。高铁站环境复杂,需要规划机器人可运行区域,避免其误入设备区、卫生间、轨行区等位置。
机器人完成SLAM建图后,与高铁站电子地图进行比例映射,将机器人实时位置与运动状态与后台管理系统电子地图进行匹配,同时,后台根据当前位置与机器人运动目的地进行路径规划,给机器人发送控制指令,实现自动行驶[7]。
3.2 回声降噪、噪声抑制及6mic方位降噪技术
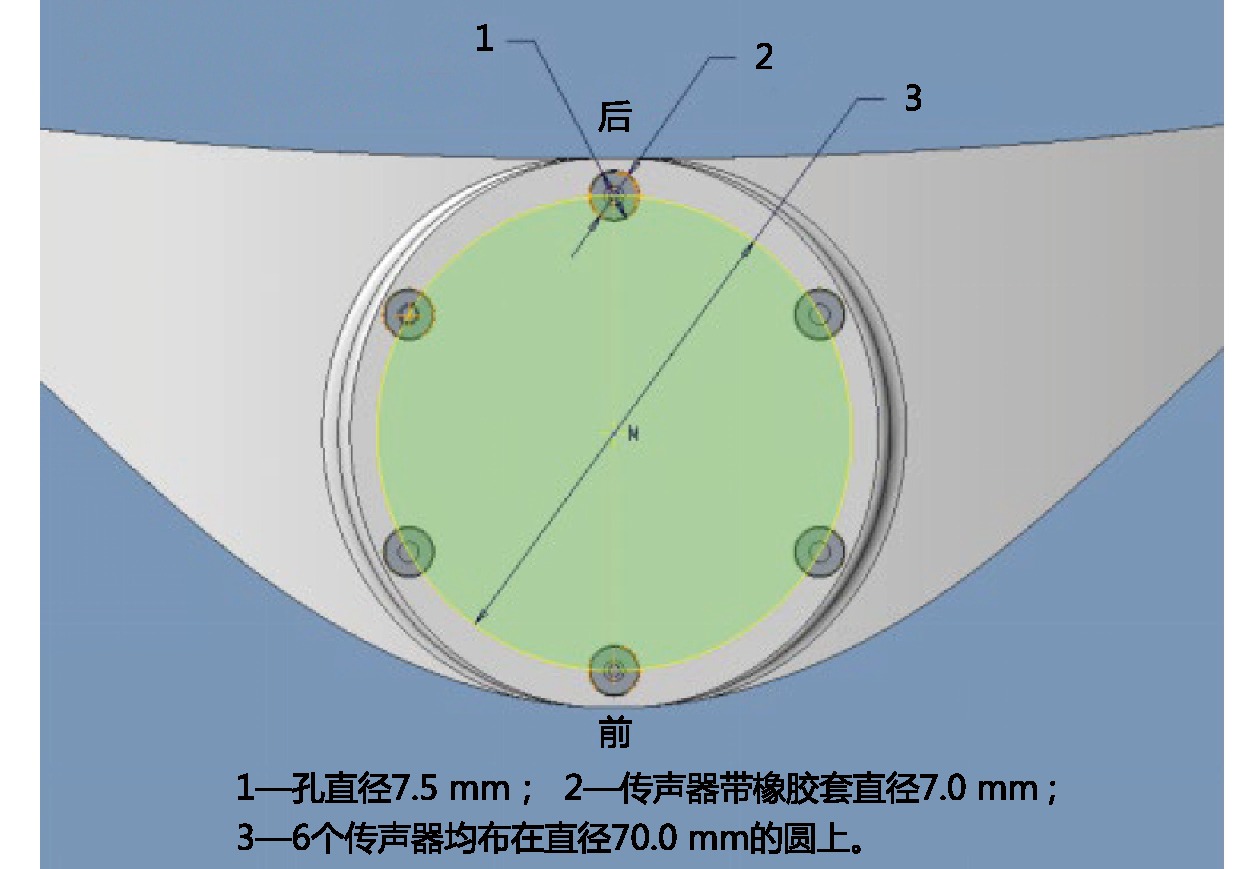
针对高铁站人流量大,声音嘈杂的特点,采用6mic方位降噪技术,机器人顶部安装有6个负责声音采集的传声器声卡,6个传声器收集到的声音先传输给USB声卡进行回声降噪处理,通过现场调试,修改滤波器系数,对回声进行估算,在话筒的输入信号中将回声估计值减去,达到消除回声的目的。
通过前期噪声抑制调试,分析背景噪声的强度和频谱,设置相应滤波器。人机交互时,通过区分讲话者的频谱和背景噪声频谱,滤波器将对背景噪声频谱进行抑制,对交互者声音频谱放行,达到噪声抑制的效果。
通过6个不同位置的传声器,可以识别对话者声音的输入方向,同时利用多个传声器收集到的信号可以增强或抑制某一方向传来的声音。利用这种方法,传声器阵列可以有效增强噪声环境中特定声音信号 [8],实现多功能旅客服务机器人在高铁站嘈杂环境中的声音处理。6mic设计图如图3所示。
3.3 物联方案
为实现多功能旅客服务机器人自动通过闸机及自动呼叫乘坐直梯,其与车站现有设备设施都搭载了无线传输模块。无线传输模块可对传输的数据进行打包、检错、纠错处理,实现机器人远程控制闸机及直梯,进行迎宾导引及移动验检票服务。
4 结束语
多功能旅客服务机器人作为旅客服务的一部分,可实现与铁路其他相关系统的互联互通,解决既有旅客服务中耦合度高、信息点分布散的问题,实现铁路旅客服务信息的集成共享。通过机器视觉识别技术,提高旅客服务的交互主动性;通过智能语义理解,提高解决旅客问题过程中的智能化,在降低人工成本、提高时间效率的同时,通过机器学习及大数据分析机制,提升解决旅客问题的指向性、预测性;通过与直梯、闸机物联,实现旅客无感进站,减少旅客操作及物体接触,为旅客提供更加温馨舒适、便捷智能的乘车体验。同时,多功能旅客服务机器人作为智慧展示终端,为将来铁路智慧化,如安防巡检、环境提升、助老助残、信息传播等提供前端硬件支撑。
-
[1] 张春家,史天运,吕晓军,等. 铁路智能客运车站总体框架研究 [J]. 交通运输系统工程与信息,2018,18(2):40-44. [2] 王同军. 中国智能高速铁路体系架构研究及应用 [J]. 铁道学报,2019,41(11):1-9. [3] 刘 军,马小宁,李 平,等. 面向京张高铁的智能化服务总体应用框架设计 [J]. 铁路计算机应用,2021,30(8):1-5. DOI: 10.3969/j.issn.1005-8451.2021.08.01 [4] 单杏花,王富章,李 锋,等. 铁路“互联网+”旅客服务的研究与设计 [J]. 铁路计算机应用,2015,24(11):5-8. [5] 杨国元,吕晓军,李 超,等. 基于ROS的铁路客站自主移动机器人关键技术研究 [J]. 铁路计算机应用,2020,29(5):17-21. DOI: 10.3969/j.issn.1005-8451.2020.05.004 [6] 邵长勉. 动态环境下移动机器人定位及地图创建[D]. 南京: 南京邮电大学, 2014. [7] 苏 青. 多机器人路径规划与协同避碰研究[D]. 南京: 南京邮电大学, 2014. [8] 马斌奇. 多机器人协作与控制策略研究[D]. 西安: 西安电子科技大学, 2009. -
期刊类型引用(3)
1. 黄凌杰. 服务机器人室内投递的全局路径规划仿真. 福建电脑. 2023(03): 104-106 .  百度学术
百度学术
2. 王睿,杨元元,任秋呈. 城市轨道交通站内服务机器人的拟人化设计研究. 工业设计. 2023(11): 157-160 . 百度学术
3. 戴彦华,陈天煜,支涛,李全印. 服务机器人与铁路客运站既有系统设施融合应用的设计与实现. 铁道运输与经济. 2022(09): 77-82 . 百度学术
其他类型引用(1)
 下载:
下载:
计量
- 文章访问数: 152
- HTML全文浏览量: 178
- PDF下载量: 37
- 被引次数: 4
