

Integrated information platform of cloud-edge-terminal collaboration and evaluation-repair for intelligent operation and maintenance of catenary
-
摘要:
为实现轨道交通牵引供电接触网智能化运营维护(简称:运维),自轮运维装备精细化、数字化与智能化,基于接触网智能运维体系下的业务需求,设计云边端协同和测评修一体化信息平台,实现远程检修计划编制、作业安全监控、现场终端设备控制、数据采集分析及机器人智能维修的全流程管理。通过单点登录、时钟同步等技术实现控制、检测、维修等子系统的集成;构建云边端协同的网络系统,实现云边数据快速转储与安全传输。该平台为接触网智能运维提供全面支撑,提高重大设备故障处置能力,保障接触网安全可靠运行。
Abstract:In order to implement intelligent operation and maintenance of the traction power supply catenary in rail transit, as well as the refinement, digitization, and intelligence of self-propelled operation and maintenance equipment, this paper designed an integrated information platform of cloud-edge-terminal collaboration and evaluation-repair based on the business requirements of the catenary intelligent operation and maintenance system, which implemented the full process management of remote maintenance plan preparation, job safety monitoring, on-site terminal equipment control, data collection and analysis, and robot intelligent maintenance. It integrated subsystems such as control, detection, and maintenance through technologies such as single sign on and clock synchronization, and constructed a cloud-edge-terminal collaboration network system to implement fast dumping and secure transmission of cloud-edge data. This platform provides comprehensive support for intelligent operation and maintenance of catenary, improves the ability to handle major equipment failures, and ensures the safe and reliable operation of catenary.
-
截至2023年底,我国电气化铁路运营里程超过12万km,接触网作为轨道交通牵引供电系统的重要组成部分,设备种类繁多且数量巨大,运营维护(简称:运维)工作繁重。当前的运维工作除定期检修外,采用检测—评价—维修(简称:测评修)三级信息化模式。其中,检测依托铁路供电安全检测监测系统[1](简称:6C系统)和城市轨道交通专用检测系统[2]等;评价依托高速铁路综合巡检分析系统、6C系统图像智能识别[3]、6C大数据分析系统[4]等;维修主要使用各铁路局集团公司、城市轨道交通运营公司自建的供电管理信息系统[5],实现生产信息的汇集。但各系统分散建设,存在系统间相互独立、不同层级协同水平较差等问题,导致信息资源难以集成共享,整体效益难以充分发挥。
随着云计算、边缘计算、物联网等技术的不断发展,采用云边端协同技术能够打通系统间的数据壁垒[6],合理运用计算资源。目前,云边端协同技术以数据服务为切入点,广泛应用于高速铁路(简称:高铁)防灾[7]、列车自动监控[8]、售票系统[9]、城市轨道交通视频监控[10]、信号智能运维[11]及高铁信号智能运维[12]等场景,但在铁路供电专业,尤其是接触网运维方面,没有得到广泛应用。
本文面向轨道交通牵引供电接触网智能自轮运维装备(简称:自轮运维装备车组)的集成需求,开发云边端协同和测评修一体化信息平台(简称:云边端信息平台),实现终端设备、车组边缘系统和远程云平台同层级系统协同联动,不同层级数据汇集共享,为接触网设备识别分析和机器人自主维修的智能运维工作提供统一支撑。
1 平台设计
1.1 平台组成
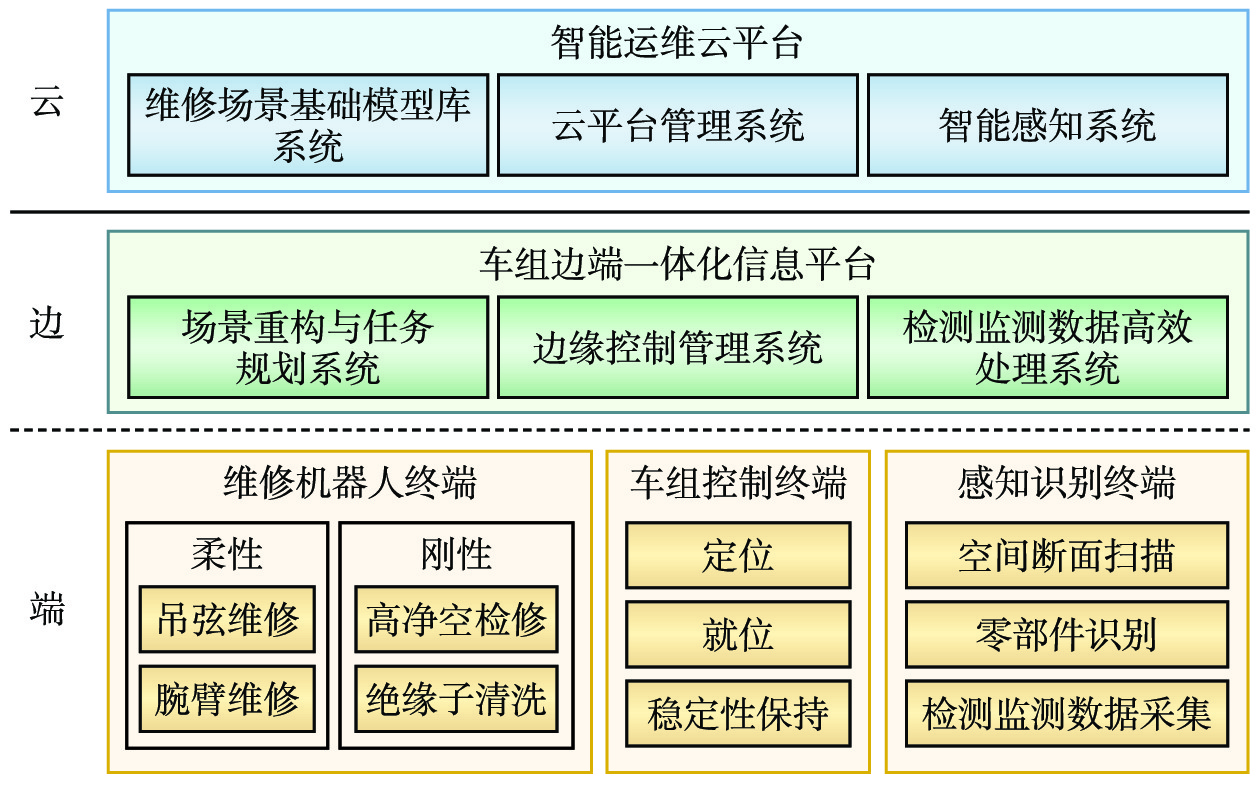
云边端信息平台由智能运维云平台(简称:云平台)、车组边端一体化信息平台(简称:边平台)及各类终端组成,其主要组成如图1所示。
(1)云平台层集成云平台管理系统、智能感知系统、维修场景基础模型库系统。其中,云平台管理系统主要维护运维业务数据;智能感知系统主要进行缺陷综合分析;维修场景基础模型库系统管理用于仿真的基础数据。
(2)边平台层集成边缘控制管理系统、场景重构与任务规划系统、检测监测数据高效处理系统,其中,场景重构与任务规划系统用于维修仿真和维修任务下发,优化作业流程;边缘控制管理系统管控边端设备与作业流程,保障车组边端设备协同稳定运行;检测监测数据高效处理系统快速筛选、处理采集到的数据,为云端和终端反馈有效信息,实现边端数据的高效流转与预处理。
(3)端层由维修机器人终端、车组控制终端、感知识别终端组成。维修机器人终端包括适用于柔性接触网的吊弦维修机器人和腕臂维修机器人,以及适用于刚性接触网的高净空检修机器人和绝缘子清洗机器人,适配不同作业需求;车组控制终端通过定位、就位、稳定性保持功能,保障车组作业时位置精准、状态稳定;感知识别终端负责空间断面扫描、零部件识别及数据采集,为运维提供环境与设备状态信息,构建起从执行到感知的终端作业体系。
1.2 智能运维业务贯通
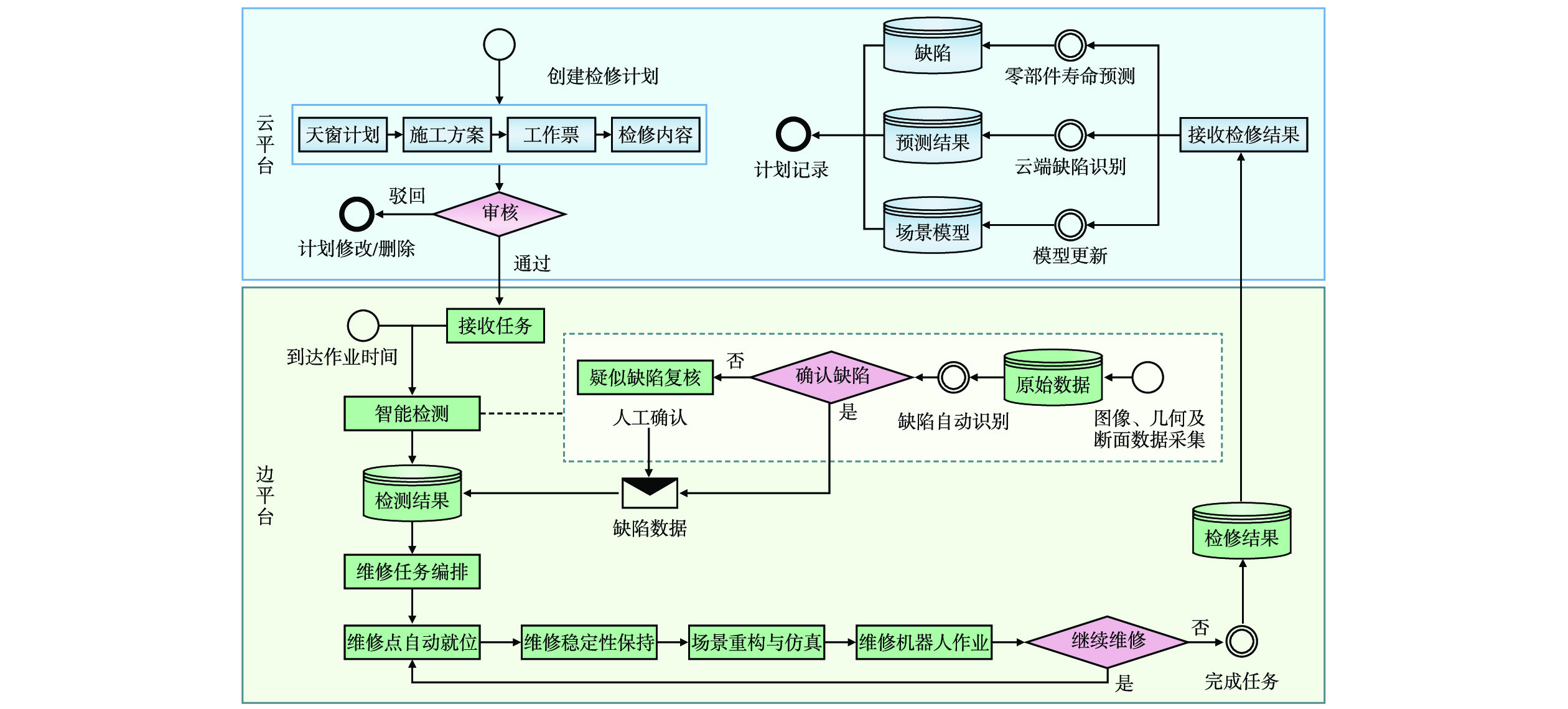
云边端信息平台主要业务模型如图2所示。
(1)云平台的主要业务:管理检修计划(任务)全生命周期、维护基础数据和接触网检修资料、实现缺陷综合研判分析、预测零部件剩余寿命和远程安全监控。
(2)边平台的主要业务:执行检修任务,采集自轮运维装备车组所处位置的空间断面数据,以及接触网设备的几何数据和图像数据,实现缺陷专项研判分析,控制自轮运维装备车组自动前往维修点,下发维修任务至机器人进行自主维修。
1.3 云边交互和边端协同
(1)云(云平台)边(边平台)交互:云平台下发检修计划至边平台,边平台在执行检修任务过程中实时上传监控数据,检修结束后统一上传检测数据和维修数据至云平台。保证云边交互数据的安全性、一致性、完整性和快速转储。
(2)边(边平台)端(终端设备)协同:对边平台异构系统进行状态检测、时钟同步、接口融合和数据互通,确保自轮运维装备车组安全行驶、限界内稳定维修、检测监测数据准确定位和维修点精确就位。
2 平台架构
2.1 总体架构
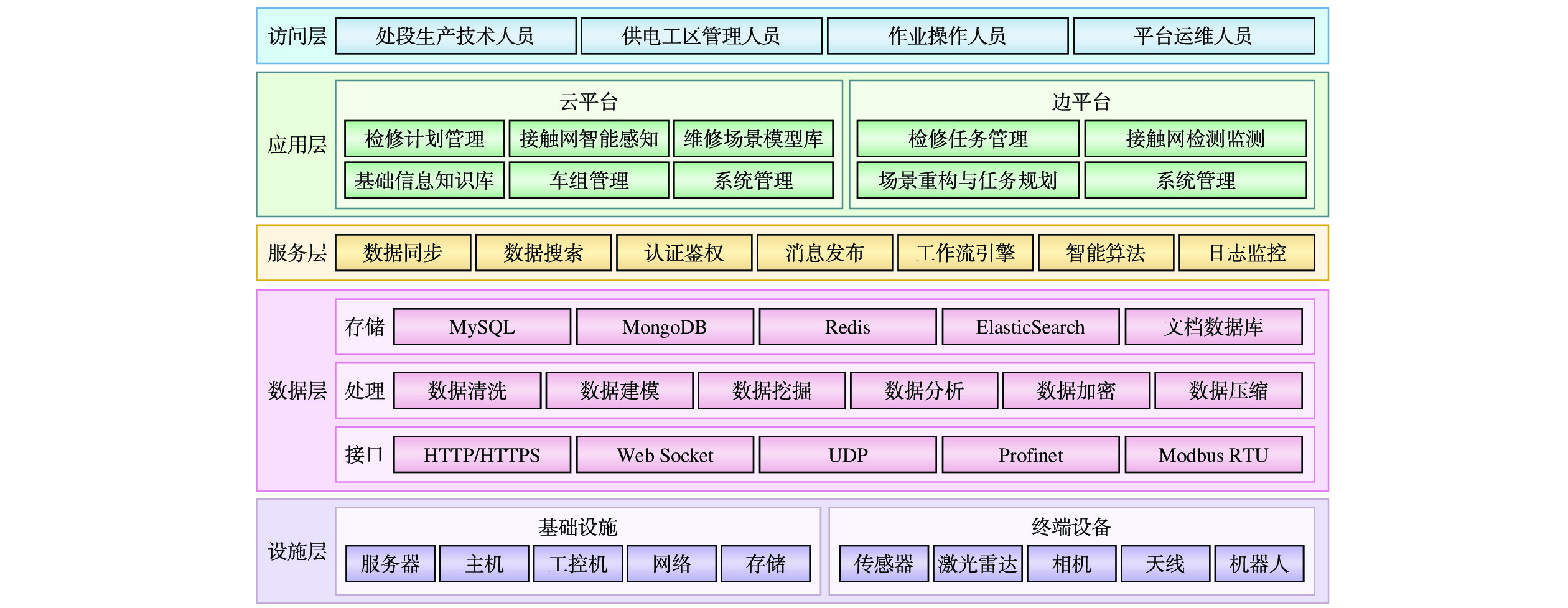
云边端信息平台总体架构如图3所示。
2.1.1 设施层
设施层包括基础设施和终端设施。基础设施为云边端信息平台和各系统提供服务器、主机及工控机等硬件支持,提供存储及网络通信环境;终端设施包括传感器、激光雷达、相机及天线等数据采集终端和维修机器人执行终端。
2.1.2 数据层
数据层细分为数据接口层、数据处理层和数据存储层。数据接口层管理云平台内部各系统间、云平台与边平台间、边平台内部各系统间、各系统与其终端间的通信协议和接口规范,确保数据安全、稳定和快速传输。数据处理层包括数据清洗、数据建模、数据挖掘、数据分析、数据加密、数据压缩等,汇总和分析大量数据,整合不同数据源的数据。数据存储层对数据进行持久化存储,利用关系型数据库MySQL存储基础数据和业务相关的结构化数据;非关系型数据库MongoDB存储包含断面特征和几何特征的缺陷数据;Redis缓存安全监控等实时更新和访问的数据;Elasticsearch管理日志;文档数据库存储检测视频和设备图片。
2.1.3 服务层
服务层以数据层为基础,为应用层的业务提供基础服务。数据同步保证云边端信息平台各系统的数据一致性和数据共享;数据搜索提升筛选和模糊搜索的效率;认证鉴权为该平台各系统提供统一的登录入口,保证外部用户安全接入该平台;消息发布和工作流引擎确保业务审批流程顺利进行;智能算法解耦缺陷识别和零部件寿命预测的模型,保证该平台因算法迭代优化的平滑升级;日志监控帮助用户及该平台运维人员快速定位异常问题、溯源安全类事件等,确保其运行安全稳定。
2.1.4 应用层
应用层组装各业务功能进而形成完整业务逻辑。云平台侧重数据的统一维护、检修计划的创建和监控,提供检修计划管理、接触网智能感知、维修场景模型库、基础信息及知识库、车组管理、系统管理等功能;边平台聚焦检修任务的执行,提供检修任务管理、接触网检测监测、场景重构与任务规划等功能。
2.1.5 访问层
云边端信息平台访问用户包括:供电处/段生产技术人员,负责计划审批和生产过程监控;供电工区管理人员,负责检修计划提报和相关数据维护;作业操作人员,执行检修任务并进行人机交互;运维人员,解决用户实际问题并对该平台进行维护和升级。
2.2 网络架构
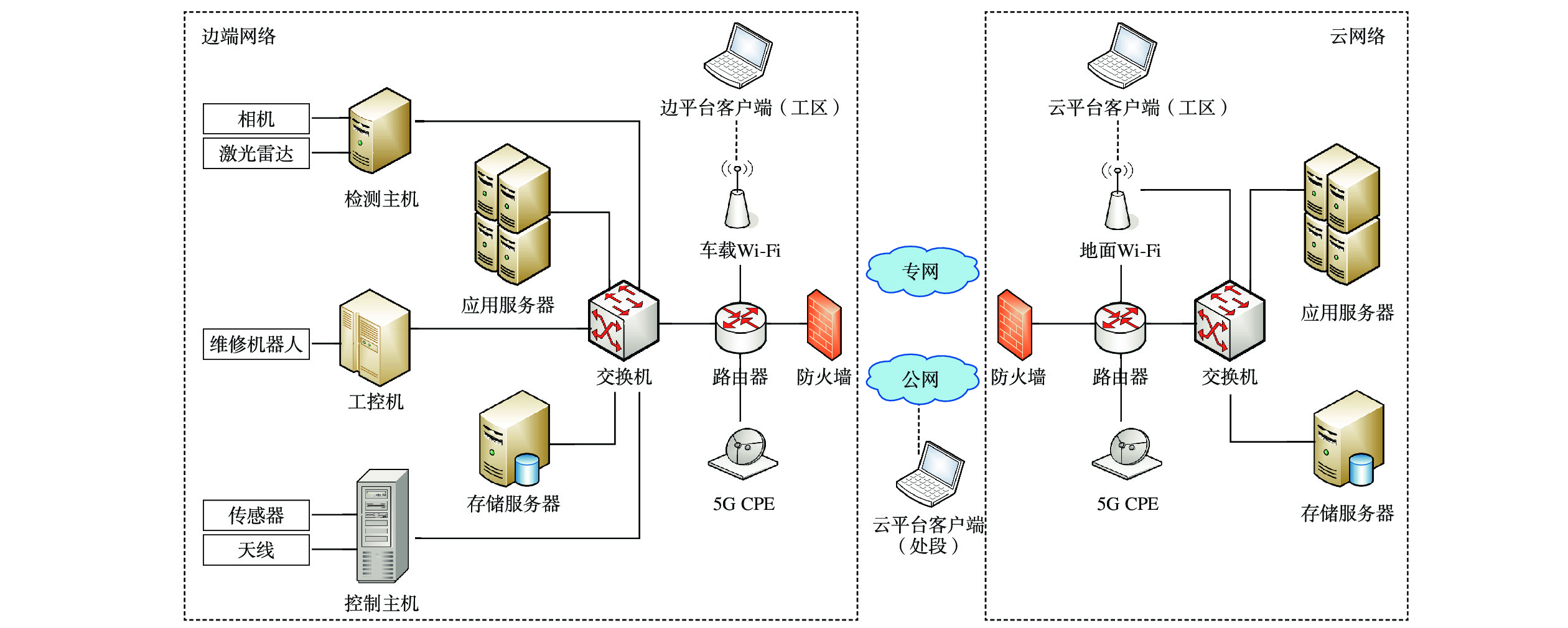
云边端信息平台的网络架构如图4所示。
边平台各系统分别与其终端设备相连,实现原始采集数据的汇集,终端设备的软件部署在主机及工控机中,边平台各系统部署在应用服务器内,通过交换机实现互联互通。
云平台各系统部署在地面服务器中,边平台和云平台均采用应用服务与数据存储隔离的部署方式,车载及地面均设 Wi-Fi(AP)支持无线访问和数据接入。自轮运维装备车组在出乘期间使用5G CPE(Customer Premise Equipment)通过公网实现监控数据和定位数据的云边实时交互,在回库时可通过接入专网的方式进行云边数据传输。
3 功能设计
3.1 云平台功能
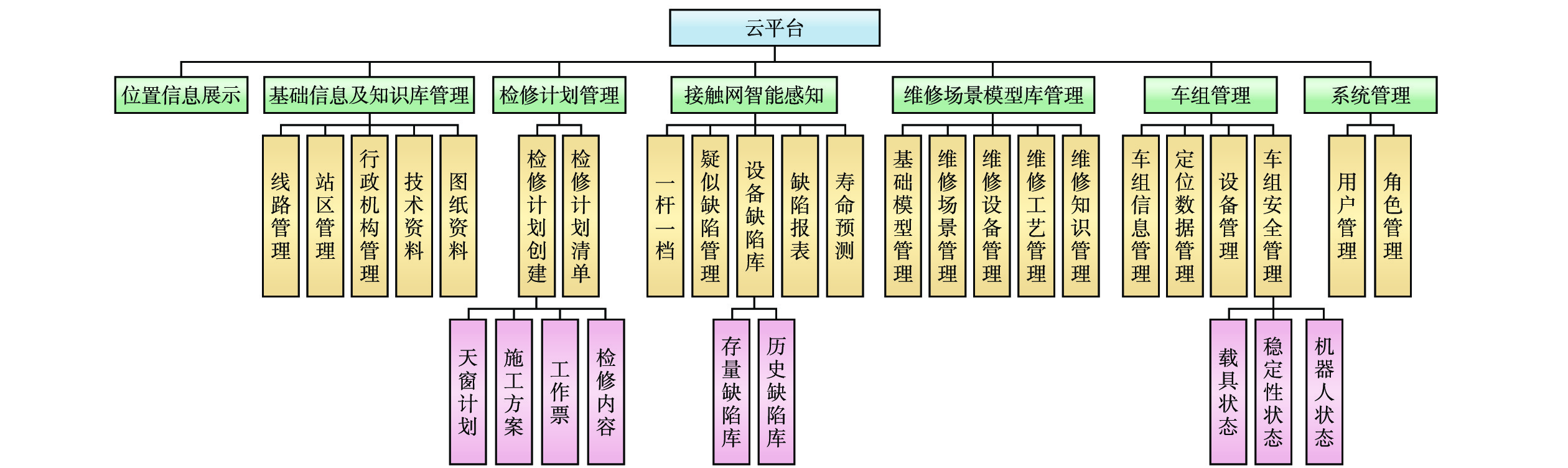
云平台功能架构如图5所示。
3.1.1 位置信息展示
云平台首页以地图形式展示当前管控的所有自轮运维装备的位置,支持按时间段查询历史运行轨迹,提供检修作业监控查看功能。
3.1.2 基础信息及知识库管理
维护运维所需要的基础数据(线路、站区管理)、组织架构(行政机构管理)和相关资料(技术资料和图纸资料)管理。其中,基础数据可向用户展示当前管控范围;行政机构管理为业务流程的审批节点提供依据;技术和图纸资料供生产人员查询和学习。
3.1.3 检修计划管理
以清单形式展示多个检修计划的开始时间、结束时间、审核状态及执行情况等信息。创建检修计划时,用户需要依次完成申报天窗计划、制定施工方案、填报工作票、填写检修内容这4步操作,提交信息后由上级用户进行审核;此外,支持对单条检修计划进行查看详情操作,详情界面展示检修计划的基础信息,若该条检修计划已执行完毕,还将展示检修结果,其中包括各种检测数据上传情况和缺陷清单的检测结果,以及机器人处理缺陷结果的维修结果。
3.1.4 接触网智能感知
一杆一档存储接触网设备原始图像,检修任务执行后相应区段的数据将会自动更新;疑似缺陷管理以清单形式展示系统无法自动判断的缺陷,供用户进行人工复核;设备缺陷库分别展示存量缺陷(检测出尚未处理的缺陷)和历史缺陷(已处理的缺陷);缺陷报表功能统计不同缺陷类型的数量,并支持根据站区分析缺陷分布情况;寿命预测通过上传或选择一杆一档中的设备图像,对该设备的剩余寿命进行预测分析。
3.1.5 维修场景模型库管理
维修场景基础模型涵盖接触悬挂、支持、定位、支柱等构成接触网维修场景的基本元素;维修场景管理主要针对自轮运维装备车组支持机器人自主维修的 3D 场景,包含柔性接触网隧道内 / 外螺栓拧紧、拉出值调整、吊弦更换、吊弦调整,以及刚性接触网车站 / 隧道螺栓拧紧、刚柔绝缘子清洗等 12 种场景;维修设备管理负责相关设备的模型构建;维修工艺管理聚焦不同维修场景下的工艺流程和所用设备信息;维修知识管理则将维修场景、工艺和设备等信息进行知识图谱建模,供维修机器人使用。
3.1.6 车组管理
车组信息管理展示管控的所有自轮运维装备车组清单;定位数据管理存储不同时间点的定位信息;设备管理以单辆自轮运维装备车组为单位,对组成的设备信息进行管理。车组安全管理对载具状态、稳定性状态和机器人状态进行监测。
3.1.7 系统管理
包括用户管理和角色管理,对云平台的登陆用户和其所具有的权限进行管理。
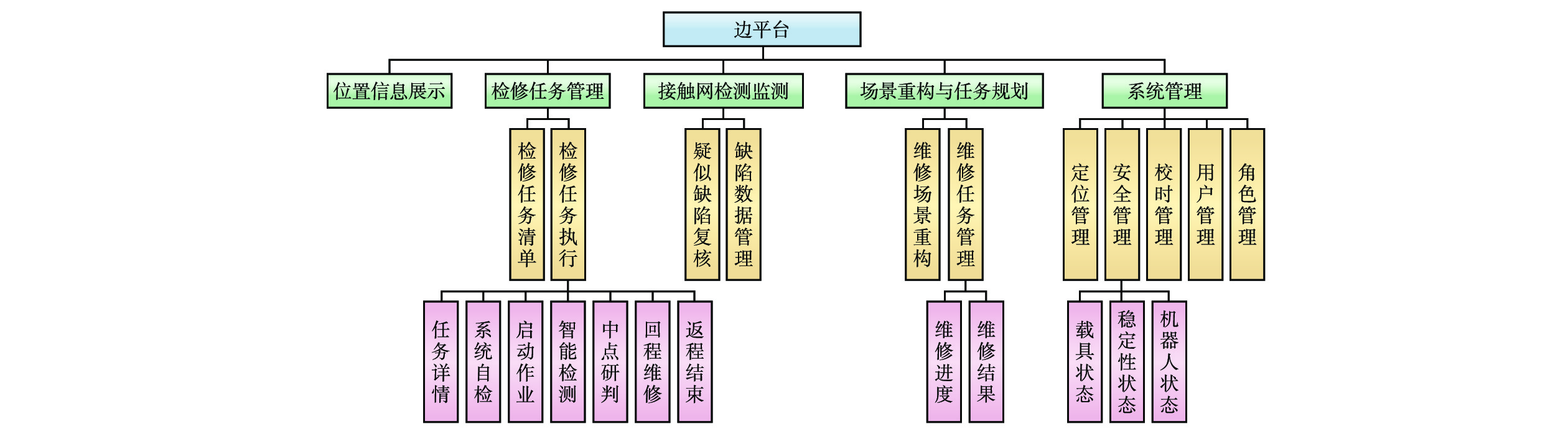
3.2 边平台功能
边平台功能架构如图6所示。
3.2.1 位置信息展示
边平台部署在自轮运维装备车组的移动机房中,边平台与车组为一对一的关系,首页以地图形式展示当前自轮运维装备车组的位置,支持按时间段查询历史运行轨迹,查看机房设备和机器人设备本地监控。
3.2.2 检修任务管理
检修任务清单显示云平台下发的检修任务。检修任务执行分为7个阶段:任务详情,作业开始前对检修任务的信息进行查看;系统自检,对各系统的运行状态和通信连通性进行检测;启动作业,自轮运维装备车组前往作业地点,定位就位系统开始记录位置信息;智能检测,到达作业范围内,开始对沿线设备进行检测监测,期间会对新检测出的缺陷进行报警;中点研判,给出新缺陷的维修建议,用户根据其严重性和计划维修的缺陷清单,确定实际维修的缺陷;回程维修,定位就位系统控制车组在维修点就位,维修机器人开始工作并返回进度和结果;返程结束,维修任务完成后对相关数据进行记录并上传至云平台。
3.2.3 接触网检测监测
疑似缺陷复核,支持对疑似缺陷图像的亮度、对比度和清晰度进行调整,并在智能维修阶段进行复核;缺陷数据管理,对本次检测出的新缺陷进行展示,可查看该缺陷的几何信息和所处位置的空间断面廓形。
3.2.4 场景重构与任务规划
维修场景重构对缺陷处的场景进行3D构建与仿真,可查看场景中对象的空间坐标;维修任务管理展示任务清单,显示执行中任务的进度,以及已完成任务的结果。
3.2.5 系统管理
包括对定位、安全、校时、用户和角色的管理。其中,定位管理存储该自轮运维装备车组的位置数据;校时管理对各系统的时钟进行校准统一,保证跨系统数据的一致性。
4 关键技术
4.1 基于单点登录的用户认证技术
单点登录实现用户在云平台或边平台1次登录,即可访问对应平台所集成的多个系统。采用基于Token的单点认证技术(Token-Based SSO),用户首次登录成功后,登录的平台会颁发包含该用户信息的Token,并在浏览器中记录该Token,以便后续访问各子系统时进行身份验证。Token-Based SSO相比基于Cookie的单点认证技术(Cookie-Based SSO)更具安全性,可防止Cookie劫持和窃取,同时支持跨域访问。
4.2 基于角色的权限控制技术
基于角色的权限控制(RBAC,Role-Based Access Control)[13],通过给用户分配包含若干权限的角色,构成“用户—角色—权限”层次化授权模型,管理用户访问控制不同资源的权限。RBAC应用于云边端信息平台的菜单加载、流程创建与审批、数据修改等功能,并与用户认证形成联动。
4.3 基于网络时间协议的时钟同步技术
网络时间协议(NTP,Network Time Protocol)同步网络中各服务器时钟信息。边平台的检测监测数据高效处理系统和边缘控制管理系统下设的定位/就位终端系统为独立的系统,须确保缺陷和其定位的一致性,实现车组分米级精确定位,因此使用NTP进行时钟同步减小误差。边平台作为主时间服务器,各系统(客户端)通过与主时间服务器(服务端)交互得到的客户端发送NTP请求时间戳、服务端接收NTP请求时间戳、服务端回复NTP请求时间戳、客户端接收NTP回复时间戳得到时间差,进而调整各子系统的时钟,该时间差不受服务器处理NTP请求的影响,由于边平台各系统从属同一局域网下,NTP精度可达亚毫秒级。
4.4 基于有限状态机的控制技术
有限状态机(FSM,Finate State Machine)由初始状态、终止状态、状态集合和转移函数组成,确保业务流程正常流转。FSM应用于检修任务的执行过程,通过时间、定位、事件等触发信号实现各阶段的自动转移;同时应用于机器人维修作业过程,确保机器人作业平台升降到指定高度并保持稳定后,再进行安全作业,作业完成复位后自轮运维装备车组才可继续移动。
4.5 基于模块化的设计技术
云平台侧重数据的统一维护和检修计划的制定,边平台侧重检修任务的执行,云平台和边平台存在部分相同功能,同一平台不同身份用户的需求和操作权限有所不同,因此云边端信息平台采用“一次开发、两套部署、多个视图”的模式,进行模块化设计与开发。
5 结束语
本文构建一个集接触网检测监测、智能算法决策、机器人高效维修、精确定位等功能为一体的云边端信息平台,解决因测评修分离导致的数据孤岛问题,以及人工检修存在的高危和低效问题。同时,根据资源汇聚共享原则,分配和构建地面私有云、车组局域网等基础设施,建立云边端协同网络系统,保证设备安全运行和数据安全传输。未来,将融合5G-R、5G毫米波等技术,提高车地数据转储效率,助力电气化铁路安全高效运维。
-
[1] 祁柳生,吴云锋. 高速铁路牵引供电安全检测监测系统(6C系统)的应用与管理[C]//第十一届世界轨道交通发展研究会年会暨2014中国轨道车辆技术与装备交流大会,2014-11-27,北京. 北京:世界轨道交通发展研究会,《世界轨道交通》杂志社,2014:126-129. [2] 赵延峰,孙淑杰,甄宇峰. 城市轨道交通综合检测系统[J]. 铁路技术创新,2015(4):83-88. [3] 王科理. 高速铁路供电安全检测监测系统图像智能识别方法研究[D]. 北京:中国铁道科学研究院,2023. [4] 乔凯庆,汪海瑛,王 婧,等. 基于6C系统大数据分析的接触网零部件缺陷特征研究[J]. 中国铁路,2023(7):39-44. [5] 乔凯庆. 铁路供电管理信息系统的研究及应用[J]. 铁路计算机应用,2024,33(1):38-43. DOI: 10.3969/j.issn.1005-8451.2024.01.06 [6] 田鹏新,司冠南,安兆亮,等. 基于数据驱动的云边智能协同综述[J]. 计算机应用,2023,43(10):3162-3169. [7] 贾利民,陈熙元,马小平,等. 基于云边交互机制的自主式高速铁路防灾系统架构[J]. 中国铁道科学,2022,43(5):165-176. DOI: 10.3969/j.issn.1001-4632.2022.05.18 [8] 徐 伟. 基于云平台的城轨列车自动监控系统总体架构研究[J]. 铁道通信信号,2024,60(9):73-80. [9] 王建文,赵文龙,黄国辉. 云边协同的新一代城市轨道交通生产系统融合平台研究[J]. 都市快轨交通,2022,35(5):146-151. [10] 周 超,林 湛,李 樊,等. 城市轨道交通视频监控系统云边协同技术应用研究[J]. 铁道运输与经济,2020,42(12):106-110,125. [11] 朱发林. 基于云边协同计算的城市轨道交通信号智能运维系统研究[J]. 铁道通信信号,2023,59(9):12-18. [12] 李 刚,李其昌,卢佩玲. 基于边云协同构建的铁路信号智能运维平台效能分析[J]. 铁道运输与经济,2023,45(4):86-91. [13] Saxena U R, Alam T. Provisioning trust-oriented role-based access control for maintaining data integrity in cloud[J]. International Journal of System Assurance Engineering and Management, 2023, 14(6): 2559-2578.
 下载:
下载:
计量
- 文章访问数: 22
- HTML全文浏览量: 3
- PDF下载量: 5
