

Foreign object intrusion detection system for railway shunting operation based on machine vision
-
摘要:
为提高铁路站场调车作业的安全性和效率,设计了一种高可靠性的铁路调车作业异物入侵检测系统。文章阐述了该系统的总体架构、数据交互架构和功能,实现站场复杂场景下人员、机车及障碍物的精准识别与实时预警;深入研究了RTDETR(Real-Time Detection Transformer)模型和检测流程等关键技术,并进行实地应用实验。实验结果表明,该系统对车列和人员的识别率分别达到95%和96%,较YOLO(You Only Look Once)v8等算法具有更优的小目标检测性能,为铁路调车的智能化提供了技术基础,未来拟融合激光雷达技术以增强恶劣环境下的鲁棒性。
-
关键词:
- 调车作业 /
- 异物检测 /
- 机器视觉 /
- 实时监控 /
- RTDETR-r32模型
Abstract:In order to improve the safety and efficiency of railway station yard shunting operations, this paper designed a highly reliable foreign object intrusion detection system for railway shunting operation, and described the overall architecture, data exchange architecture, and functions of the system to implement accurate identification and real-time warning of personnel, locomotives, and obstacles in complex scenes of the yard, delved into key technologies such as the Real Time Detection Transformer (RTDETR) model and detection process, and conducted field application experiments. The experimental results show that the recognition rate of the system for train sets and personnel reaches 95% and 96% respectively, which has better small object detection performance than YOLO (You Only Look Once) v8 and other algorithms, provides a technical basis for the intelligence of railway shunting. In the future, it is planned to integrate laser radar technology to enhance robustness in harsh environments.
-
调车作业是铁路运输中的核心环节,涵盖了列车编组、解体、摘挂、取送、转场、整理及机车车辆的进出站等任务。在传统作业模式下,这些任务主要依赖人工操作,导致人员与车辆时刻面临侵入调车线路的风险。为提高调车作业的安全性和效率,各铁路局集团公司在调车作业行车安全和行车效率方面进行了诸多探索,采用车载智能感知系统实时感知机车运行前方线路限界上的作业工具、车辆、机车和人员等障碍物[1]。
然而,车载边缘设备的算力受限,导致了检测精度的不足。此外,在高密度调车作业环境下,处理大量实时数据时可能会出现延迟,影响响应速度,从而降低作业效率、增加安全风险。尽管部分铁路站场已部署了视频监控系统[2-3],以辅助司机与调车员观察视觉盲区,但这些系统存在覆盖范围有限、无法全面自动识别站场内人员、车辆及障碍物的缺点,仍需要依赖人工监控,不仅加重了操作人员的负担,也可导致疏漏。
随着5G移动通信技术[4] 、物联网[5] 、北斗卫星导航、人工智能[6] 等技术的应用,能够为调车作业提供低时延、高可靠的服务,推动调车作业向智能化转型。基于此背景,本文设计了一种高可靠性的铁路调车作业异物入侵检测系统(简称:本文系统)。该系统融合了机器视觉[7] 、现代通信协议等关键技术,实现了高效的数据传输和异物入侵的精准检测,能够实时监测机车、车辆、人员及一定尺寸的障碍物,感知站场复杂场景,减少对人工目测的依赖[8],为远程自动监控乃至自动驾驶等提供信息支撑,以期实现站场调车作业智能化和透明化。
1 系统架构
1.1 系统总体架构
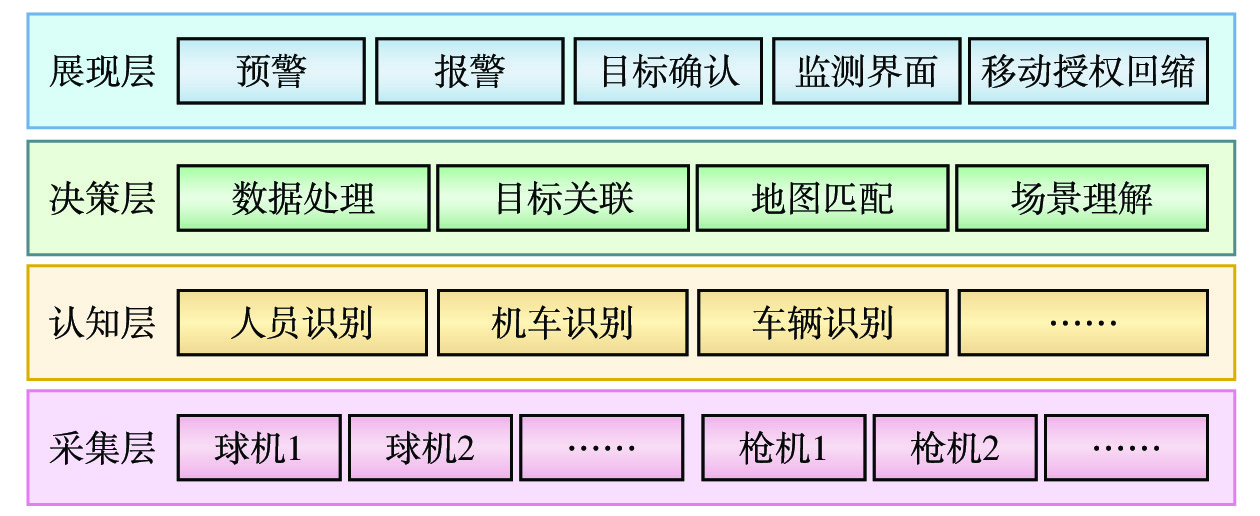
本文系统总体架构如图1所示。
1.1.1 采集层
采集层主要作用是接收多个球形摄相机(简称:球机)和枪型摄像机(简称:枪机)所捕获的图像数据,实现对站场内异物侵限及调车复杂场景的智能感知。
1.1.2 认知层
认知层主要负责对输入的视觉信息进行深度处理,应用机器视觉算法识别机车、车辆、人员及一定尺寸的障碍物等目标。
1.1.3 决策层
结合认知层的感知结果与地图匹配,进一步对数据进行分析和处理,以判断调车场景中异物、机车车辆和信号机等目标间的关联。同时,评估这些目标的位置和状态,以及是否对机车的正常运行造成潜在影响。
1.1.4 展现层
展现层基于决策层的分析结果,向车站值班员提供直观的预警、报警及监控界面。当本文系统检测到异物入侵事件时,实时显示报警信息,并将相关警报转发至地面控制中心。地面控制中心根据接收到的异物入侵信息,动态计算移动授权位置,并及时下发给车载设备,确保调车作业安全、有序地进行。
1.2 系统数据交互架构
本文系统包括智能感知子系统和智能决策子系统,且与数据中心及地面控制中心紧密协作,形成高效联动。各部分通过多种通信协议实现数据交互与功能集成。
智能感知子系统对调车作业环境进行实时感知与监控,一旦检测到异物入侵,立即生成报警信息,并通过消息队列遥测传输(MQTT,Message Queuing Telemetry Transport)协议将报警信息发送至智能决策子系统。智能决策子系统接收报警后,依据通信接口协议对报警数据进行打包处理,并分发至数据中心和地面控制中心。数据中心通过KAFKA(Apache Kafka )专有二进制协议接收并管理报警信息,负责报警信息及报警图片的界面展示和数据存储,确保报警记录的完整管理与溯源。值班人员可通过数据中心的操作终端实时查看报警信息及相关图片,迅速做出响应。同时,现场摄像头的视频流通过会话初始协议(SIP,Session initialization Protocol)传输至数据中心,实现对站场环境的全面监控。地面控制中心接收到报警信息后,基于MQTT协议解析,动态计算移动授权位置,将指令下发至车载设备,保障机车运行及调车作业的安全有序进行。本文系统的数据交互架构如图2所示。
1.2.1 智能感知子系统
智能感知子系统实时从球机和枪机拉取视频流,并利用RTDETR-r32检测模型进行异物检测。当检测到异物入侵时,将相关报警信息通过MQTT协议发送至智能决策子系统。同时,还负责对站场及调车车列的关键区域进行实时监控,并将视频流传输至智能决策子系统进行进一步处理。
1.2.2 智能决策子系统
智能决策子系统与数据中心通过KAFKA协议进行通信,将实时视频流传输至数据中心操作终端,供值班员监控列车运行前方的实时画面。同时,与地面控制中心通过MQTT协议建立通信,接收进路信息和在途车信息,并根据指令调整摄像机的方向,确保车列前方轨道的持续覆盖。智能决策子系统采用交替调动方式,动态调整摄像机角度。收到智能感知子系统的报警信息后,智能决策子系统将报警信息转发至地面控制中心,并执行移动授权回缩操作。同时,也将报警信息传送至数据中心,值班员可通过操作终端界面确认报警内容,减少误报。
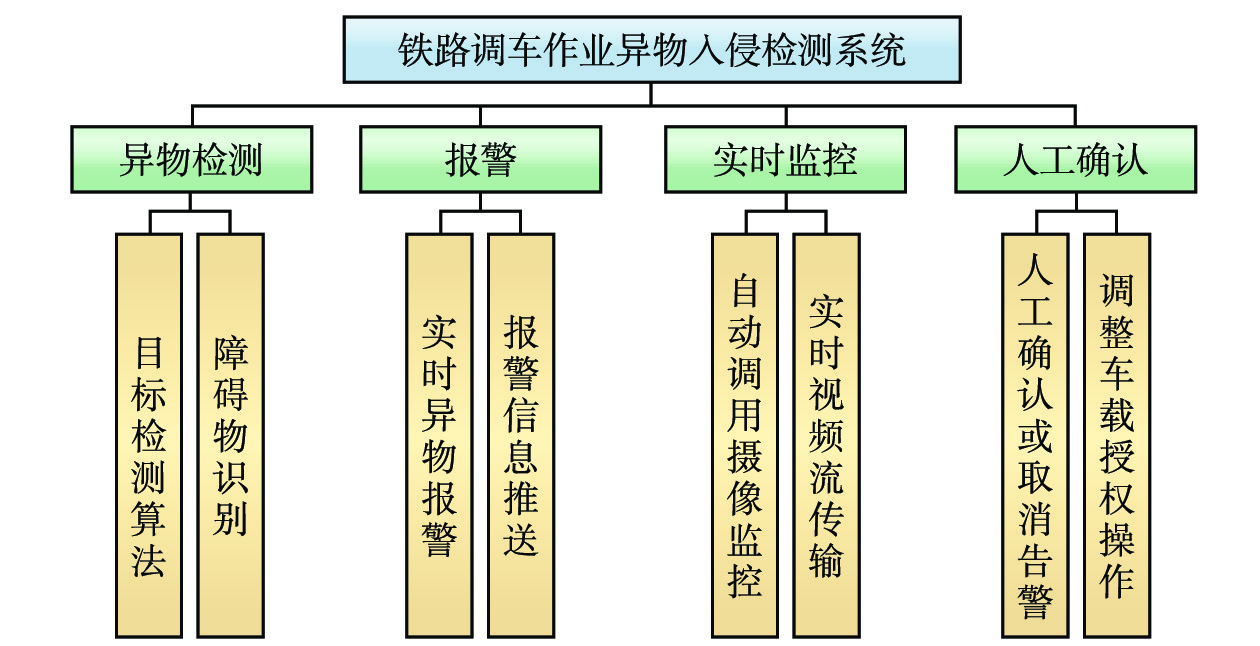
2 系统功能
围绕铁路调车作业异物入侵检测的核心需求,设计了本文系统的功能,确保能够实时监测、识别和处理铁路调车作业潜在的安全隐患。其功能架构如图3所示。
2.1 异物检测
摄像机监测范围为0~500 m,随着检测距离的增加,异物的像素尺寸逐渐减小,使得异物检测的难度增加。经过对比分析,在远距离小目标的检测领域,RTDETR-r32算法在速度和准确度上优于同等规模的YOLO(You Only Look Once)[9]最新检测器。因此,本文采用RTDETR-r32目标检测算法,对铁路站场内的异物进行检测与识别,涵盖人员、机车车辆及其他障碍物等多种类型。
2.2 报警
当在调车作业的防护区域内检测到异物入侵时,立即生成报警并发送相关信息。报警信息包括报警图片、报警时间、异物位置及异物类型等相关信息。报警内容包括站场股道号、异物所在位置及其类型等。此外,报警信息将被推送至数据中心和地面控制中心。地面控制中心根据异物入侵的位置,执行相应的移动授权回缩操作,以确保调车作业安全。
2.3 实时监控
在接收到地面控制中心发送的进路信息和在途车信息后,将自动调用与该进路相关联的摄像机,并控制摄像机旋转,确保摄像机对准指定的进路。通过SIP安全传输协议,将摄像机采集的实时视频流推送至数据中心的操作终端上展示,从而实现对整条进路区域的全面实时监控。
2.4 人工确认功能
当生成异物入侵告警时,值班人员可通过监控终端查看告警信息。若异物入侵事件确认属实,值班人员点击“确认告警”按钮;若是误报,值班人员则点击“取消告警”按钮。确认或取消的信息将被发送至车载设备,车载设备根据收到的信息判断是否需要取消移动授权回缩操作,以有效减少误报的发生。
3 关键技术
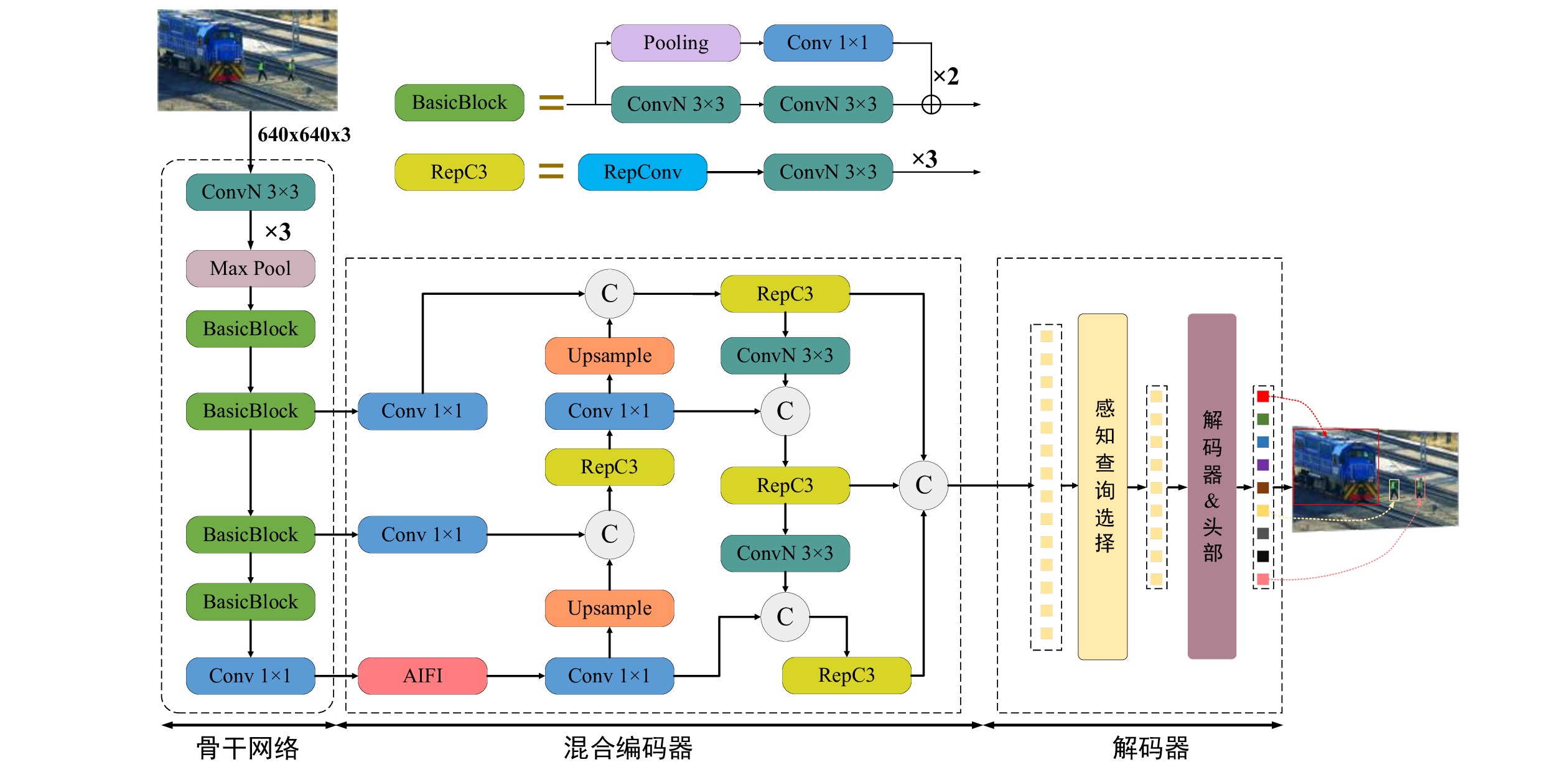
3.1 RTDETR模型
RTDETR(Real-Time Detection Transformer)是一个实时端到端的目标检测模型,它结合了卷积神经网络(CNN,Convolutional Neural Networks)和Transformer[10]的优点。在传统的CNN中,特征提取主要侧重于局部信息,但在处理全局信息和长距离依赖性时,常常表现不足。相比之下,Transformer通过自注意力机制能够有效捕捉长距离的依赖关系,但对于局部特征的处理则较为薄弱。因此,RTDETR结合了CNN和Transformer的长处,能够在目标检测任务中兼顾局部特征和全局信息[11],比较适用于铁路站场这种复杂且具有小目标检测需求的环境。
RTDETR模型的结构包括骨干网络、编码器和解码器3个主要部分。其中,骨干网络采用ResNet-32网络架构[12],负责提取深层特征。编码器通过Transformer算法处理骨干网络输出的特征,捕捉图像中的全局信息;解码器则将这些全局信息转换为目标的检测结果。通过引入感知查询机制,RTDETR能够进一步提高小目标检测的准确性,解决传统方法中训练收敛慢和查询优化困难的问题。本文采用RTDETR-r32模型,实现了推理时间和检测精度之间的平衡,既保证了较高的检测准确率,也满足了实际应用中对实时性的需求,RTDETR-r32模型结构如图4所示。
3.2 检测流程
铁路调车作业异物入侵检测系统通过在灯桥上均匀布置摄像头,覆盖站场的每一条股道。当进路股道开放后,本文系统会接收地面控制中心发送的进路信息和在途车信息,根据进路和摄像机映射关系配置表,对防护区域进行解析,并自动调用对应的球机和枪机,控制球机旋转至指定进路方向。根据车列(包括机车和车辆)的实时运行位置,采用交替调动的方式,动态覆盖车列前方的轨道区域,确保全面监控。本文系统对安装在室外灯桥上的摄像头视频流进行抽帧采集与分析,并利用RTDETR-r32检测模型对防护区域内的视频帧进行车列及异物检测。针对检测结果,当异物位置处于车列区域内时,且判定为车载物体,则不触发报警;若异物位于防护区域内但不在车列覆盖范围,则视为潜在入侵,触发报警,并将报警信息同步发送至数据中心和地面控制中心,实现快速响应和处置。异物入侵检测流程如图5所示。
4 系统应用实验
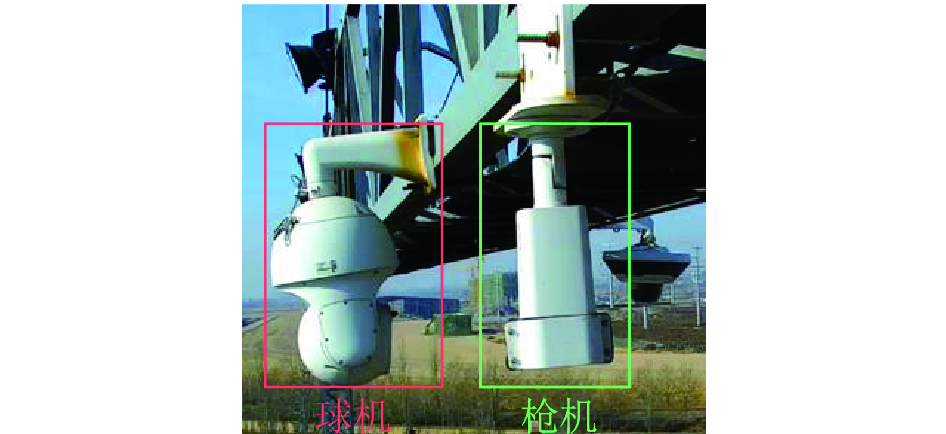
4.1 摄像机选型及站场分布
摄像机选型需要从功能、价格、场景复杂度评估及系统功能需求等方面进行分析。最终选定的球机性能为:可视距离超过500 m,内置600 m激光补光,且具有防抖功能,能够在各种复杂环境下稳定运行。为满足特定需求,枪机选用了180°超广角设计,专门用于灯桥下方的盲区补盲。具体样式如图6所示。
本文对某站场进行实地勘察,该站场设有南北2个灯桥,灯桥间距离约为500 m。由于南北灯桥的对称性,2座灯桥的球机与枪机安装方案一致。站场共计设有13条股道,4台球机被均匀布置在灯桥上,以确保覆盖半径500 m范围内的所有轨道。此外,还配置了3台焦距为2.1 mm广角枪机,均匀布置在灯桥下方,旨在覆盖20 m范围内的盲区。站场摄像机的具体分布情况如图7所示,图中,红色为球机,黄色为枪机。
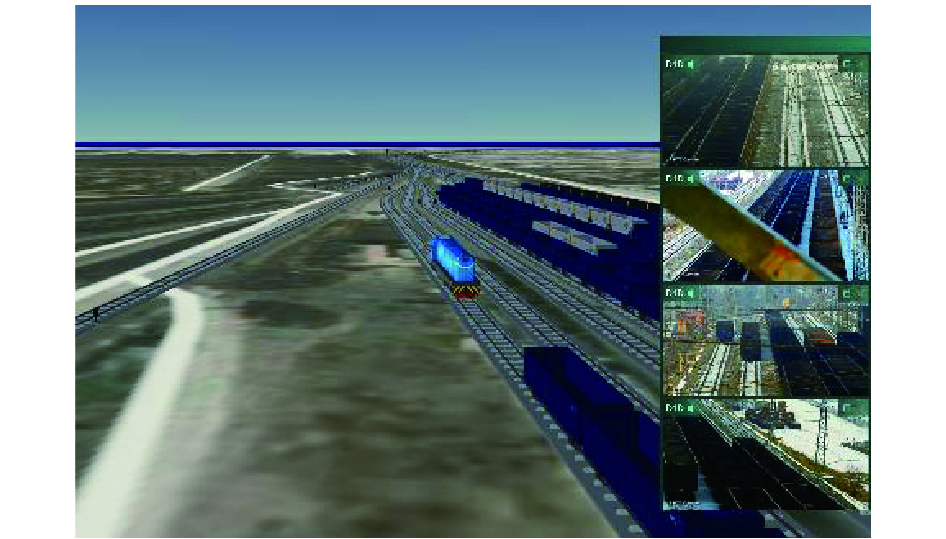
4.2 实时监控功能
在接收到进路信息后,本文系统自动调整球机朝向指定的进路,并实时推送视频流至数据中心。值班人员可通过在数据中心操作终端上点击相应的进路,实时查看车列运行前方的监控画面,实时监控画面如图8所示。
4.3 异物检测及报警
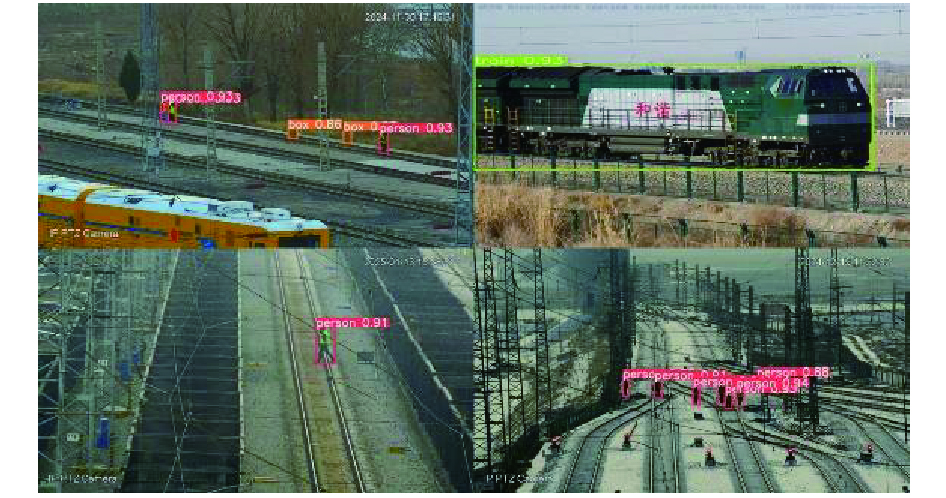
采用RTDETR目标检测算法对站场内的异物进行实时检测与识别。为验证算法性能,本文利用在该站场采集的真实场景图片和视频构建了一个包含10 000帧图片的测试集,测试场景包括白天、夜晚、雨天等不同环境下的复杂情况,其中,车列目标数量为2 000个,人员目标数量为
20 000 个。实验结果显示,车列检测的正确识别数量为1 900个,识别率达95%;人员检测的正确识别数量为19 200 个,识别率达96%。该检测算法不仅在高精度方面表现优秀,同时展现出在复杂环境下执行检测任务的强大能力,并具备较高的速度和可靠性。与当前主流目标检测算法如YOLOv8、Faster R-CNN等相比,RTDETR在处理小目标和复杂背景时表现出更高的准确率和更快的收敛速度,显著提升了异物入侵检测的整体性能和响应效率。部分检测结果如图9所示。本文系统以图形化界面展示报警信息,便于值班人员及时响应和处理。报警信息显示页面如图10所示。
5 结束语
本文研究并实现了基于机器视觉的铁路调车作业异物入侵检测系统,该系统通过集成机器视觉与现代通信协议等关键技术,弥补了传统调车作业中依赖人工目测以判断进路前方安全状况的不足。实验结果表明,该方法能够有效减轻作业人员的劳动强度,减少了人力成本。未来研究将围绕多模态感知融合技术展开,通过引入激光雷达等三维感知设备构建异构传感器系统,解决单一视觉传感器在低光照、恶劣天气条件下的检测局限性问题,形成“视觉—激光”协同感知的智能化监测体系。
-
[1] 许展瑛,刘 青,冯 军,等. 基于5G的重载车站智能调车系统总体方案研究[J]. 中国铁路,2024(8):114-121. [2] 陈 磊,贾国伟,谢俊濠. 铁路动态视频监控在调车作业过程管理中的应用[J]. 综合运输,2024,46(1):100-108. [3] 陈 刚,袁钱芳. 黄骅港智慧车站视频智能化应用研究[J]. 铁道通信信号,2023,59(10):44-49. [4] 高印铭. 5G技术在中国铁路的应用研究[J]. 铁道通信信号,2020,56(10):33-37. [5] 李 毅,蔺 伟. NB-IoT物联网技术在铁路中的应用研究[J]. 铁道通信信号,2019,55(S1):29-33. [6] 张晓栋,马小宁,李 平,等. 人工智能在我国铁路的应用与发展研究[J]. 中国铁路,2019(11):32-38. [7] 张 驰. 基于机器视觉的调车机车辅助驾驶的研究[D]. 北京:北京交通大学,2019. [8] 张小强,赵 周. 铁路调车作业安全防护技术研究[J]. 铁道货运,2024,42(1):31-36. [9] Jiang P Y, Ergu D J, Liu F Y, et al. A review of yolo algorithm developments[J]. Procedia Computer Science, 2022, (199): 1066-1073. DOI: 10.1016/j.procs.2022.01.135
[10] Zhu Y H. Performance parameters of transformers in service[J]. Electricity, 1990, 1(2): 14-15.
[11] 董 刚,谢维成,黄小龙,等. 深度学习小目标检测算法综述[J]. 计算机工程与应用,2023,59(11):16-27. DOI: 10.3778/j.issn.1002-8331.2211-0377 [12] He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]//Proceedings of the IEEE conference on computer vision and pattern recognition, 27-30 June, 2016, Las Vegas, NV, USA. New York, USA: IEEE, 2016: 770-778. He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]//Proceedings of the IEEE conference on computer vision and pattern recognition, 27-30 June, 2016, Las Vegas, NV, USA. New York, USA: IEEE, 2016: 770-778.
 下载:
下载:




计量
- 文章访问数: 37
- HTML全文浏览量: 9
- PDF下载量: 16
