

Detection method of false data injection attack in self-organizing network system of heavy-haul group trains
-
摘要:
针对重载群组列车自组织网络系统(简称:自组织网络系统)因其高度互联性面临虚假数据注入攻击的问题,设计了一种基于回声状态网络的虚假数据注入攻击检测方法。通过构建自组织网络系统的信息物理模型,设计相应的协同控制策略,确保列车组间的速度同步与安全间距。仿真实验表明,该方法成功检测出不同情境下的虚假数据注入攻击,为重载群组列车自组织网络系统提供了有效的安全保障,为铁路运输系统智能化发展提供支撑。
Abstract:This paper proposed a false data injection attack detection method based on echo state network to address the problem of false data injection attacks in the self-organizing network system of heavy-haul group trains (referred to as self-organizing network system) due to its high interconnectivity. It constructed an information physical model of a self-organizing network system and designed corresponding collaborative control strategies to ensure speed synchronization and safe distance between train groups. Simulation experiments show that this method successfully detects false data injection attacks in different scenarios, provides effective security guarantees for the self-organizing network system of heavy-haul group trains and supports the intelligent development of railway transportation systems.
-
在现代重载铁路运输中,重载群组列车自组织网络系统(简称:自组织网络系统)采用无线通信技术与信息技术进行列车之间、列车与基础设施之间的列车状态、运行计划和故障信息等数据的交换,并通过该系统进行智能化的网络化控制,使多列重载列车在运行过程中实现自主协同,从而优化整个运输网络的性能,提升铁路运输的效率和容量。
在确保运行安全、可靠且经济的前提下,自组织网络系统的关键目标之一是尽可能缩短列车组间的距离。这一举措不仅能够有效提高列车运行效率,还能显著降低能耗、缩短停车时间、增加运输容量,并有效缓解交通拥堵[1]。为了确保在缩短距离的同时不降低运输安全性,设计协同控制策略至关重要[2]。通过精确的协同控制,确保列车之间能够保持安全的距离,同时维持列车速度的一致性。这种协同控制策略不仅能够有效避免列车之间的碰撞风险,还能在复杂的运行环境中保持列车运行的稳定性和可靠性。
自组织网络系统的协同控制依赖于列车之间实时的交互和位置、速度信息的共享[3]。然而,正是由于这种高度的互联性,该系统也暴露在各种网络攻击的威胁之下[4]。虚假数据注入攻击便是一种常见且极具危险性的攻击方式[5],在此类攻击中,恶意攻击者会向列车通信网络中插入虚假或误导性数据,以达到篡改原本通信数据的目的[6]。这种攻击行为一旦得逞,很可能破坏列车组间的协同控制机制,导致自组织网络系统的正常运行受到影响,甚至引发安全事故[7]。因此,针对自组织网络系统所面临的潜在风险和安全隐患,研究攻击检测技术具有极高的紧迫性和重要性。
为此,本文提出了一种基于回声状态网络[8]的虚假数据注入攻击检测方法,用以辨识重载群组列车运行中的异常状况,并通过仿真实验对其有效性进行了验证。
1 自组织网络系统相关模型及协同控制策略模型
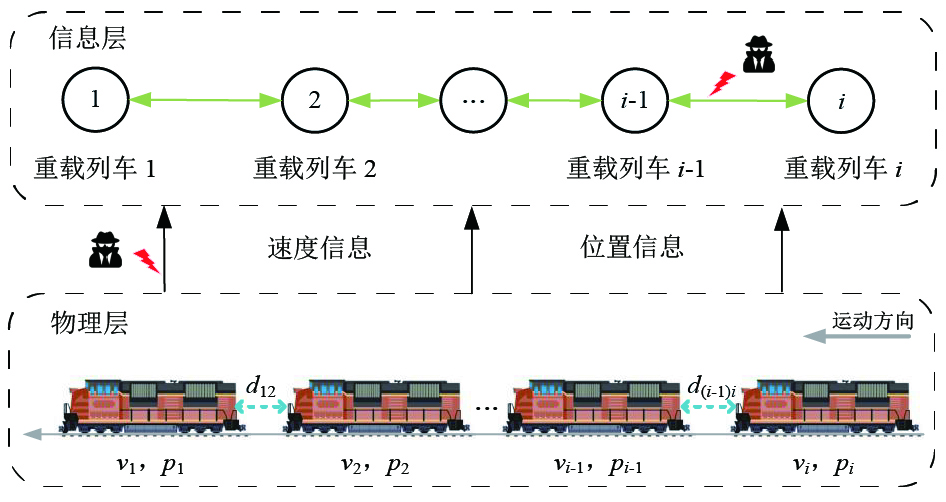
本文构建了一个自组织网络系统的物理模型,如图1所示,以此来表征该系统的运作机制。在物理层,建立了重载列车的状态空间模型;在信息层,则利用图论理论描绘了列车之间的通信关系。
1.1 重载群组列车自组织网络系统物理模型
本节建立了多列重载列车的状态空间模型,表示为
{˙pi(t)=vi(t)˙vi(t)=1miui(t)−ri(t) (1) 式(1)中,
pi(t) 、vi(t) 表示重载列车i 的位置和速度,初始位置设定为0;mi 为列车i 的质量;ui(t) 、ri(t) 分别是牵引力和总阻力。总阻力
ri(t) 定义为ri(t)=rmi(t)+rwi(t)+rpi(t) 。其中,rmi(t) 表示机械阻力,与摩擦和振动有关;rwi(t) 代表空气阻力,它随着火车速度的增加而增加;rpi(t) 代表环境阻力,受轨道坡度和曲率影响。1.2 重载群组列车自组织网络系统信息模型
在重载群组列车自组织网络系统的构建与控制过程中,借鉴多智能体系统的概念,将每列重载列车视为一个独立且具有智能决策能力的智能体,这样,整个重载群组列车自组织网络系统就可被视为一个多智能体系统。这一系统中,各智能体通过通信网络进行信息交互,以实现整体的协同控制。
将重载群组列车自组织网络系统的通信结构抽象为一个图,以便更直观地描述和分析其信息传输机制。在这个图中,每辆重载列车被当作一个节点,每个节点代表列车自身,其状态信息包含但不限于速度、位置等关键参数。而列车与列车之间的信息交换通道则通过图中的边来表示,例如,速度信息的交换构成了一种通信拓扑,其中,某列车的速度信息可以发送给与其相连的其他列车。
具体到速度信息的通信拓扑,可以通过拉普拉斯矩阵来进行数学建模。在该模型中,拉普拉斯矩阵
\boldsymbol{L}_v=\boldsymbol{D}_v-\boldsymbol{A}_v ,通常由速度信息的邻接矩阵\boldsymbol{A}_v 和度矩阵\boldsymbol{D}_v 定义。其中,邻接矩阵Av反映了列车间速度信息直接交换的关系;而度矩阵Dv则记录了每列列车接收或发送速度信息的数量。同样,对于位置信息的交换,也可以构建对应的位置信息通信拓扑,并得到相应的位置信息拉普拉斯矩阵
\boldsymbol{L}_p ,其构建方式与速度信息拉普拉斯矩阵类似,只是邻接矩阵\boldsymbol{A}_p 和度矩阵\boldsymbol{D}_p 会反映出列车间位置信息的交换规律。1.3 自组织网络系统协同控制策略
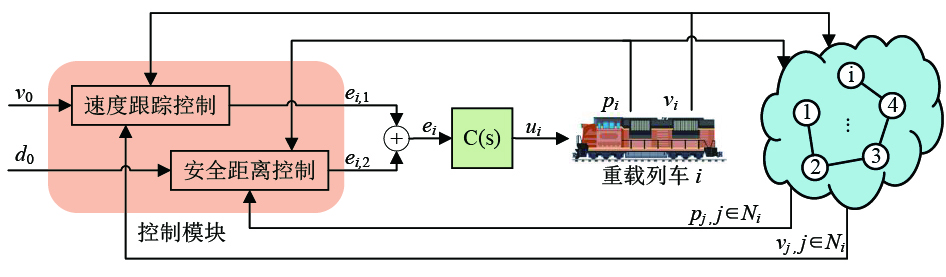
协同控制策略通过两个主要模块实现:速度跟踪控制模块和安全距离控制模块。这两个模块协同工作,实现总跟踪误差最小,进而提升列车运行性能和安全性。本文设计的自组织网络系统协同控制策略如图2所示。
在速度跟踪控制模块中,目标是确保每列列车能够精确地追踪预设的参考速度,并在此基础上实现列车间的速度协同调控。在安全距离控制模块中,目标是确保列车之间保持理想的安全距离,从而避免碰撞风险并优化运行效率。为了补偿总跟踪误差,设计了一个比例积分控制器作为补偿器。比例积分控制器的输出通过列车之间交换的速度和位置信息计算得出。
在自组织网络系统中,每列列车通过与群组内的列车通信,实现对参考速度的追踪并保持必要的安全间隔。总跟踪误差
{e_i} 包括2个组成部分:速度跟踪误差{e_{i1}} 和安全距离跟踪误差{e_{i2}} 。速度跟踪模块的功能为确保列车能够准确跟踪参考速度,并在此基础上实现列车间的速度协同调控,其对应的速度跟踪误差数学模型为{e_{i1}} = ({v_0} - {v_i}) + \sum\limits_{j \in {N_i}} {({v_j} - {v_i})} (2) 式(2)中,
{v_0} 表示预设的参考速度;{v_i} 表示列车i 的速度;{v_j} 表示与列车i 在同一群组的列车j 的速度;{N_i} 表示群组内列车i 可通信的所有列车的集合。安全距离跟踪模块则可通过设计一个人工势场函数来实现,其负梯度给出了期望的距离间隔跟踪误差。安全距离跟踪误差数学模型为
{e_{i2}} = \sum\limits_{j \in {N_i}} {({d_{ij}} - {\lambda _{ij}}{d_0})} , i \in \{ 1,2, \cdots ,n\} (3) 式(3)中,
{d_0} 表示期望的列车i 与列车j 之间的理想安全距离;{\lambda _{ij}} = 1 表示列车j 在列车i 之前,否则{\lambda _{ij}} = - 1 ;{d_{ij}} 表示列车i 与列车j 之间的实际距离,定义为{d_{ij}} = {p_j} - {p_i} 。为补偿系统的总跟踪误差,设计了一个比例积分(PI)控制器作为补偿器,其表达式为{u_i} = C(s){e_i} ,其中,{u_i} 表示PI控制器的输出;C(s)表示PI补偿器。控制信号基于列车之间交换的速度信息和位置信息,这意味着一旦通信链路上发生虚假数据注入攻击,闭环系统的控制信号将会被操控,进而影响到自组织网络系统的正常运行性能。
2 虚假数据注入攻击检测方法
2.1 虚假数据注入攻击模型
在自组织网络系统中,网络传输组件负责将速度和位置传感器测得的数据打包发送出去,针对网络节点数据传输阶段的一种典型攻击手段是虚假数据注入攻击。假设攻击者能够非法接管网络传输节点,并在数据包正式发送前将其伪造的数据混入真实数据中,那么包含篡改信息的错误数据包将被传送到整个数据交换网络,由此导致多辆列车同时接收到含有错误信息的速度和位置数据包。
作为数据发送源的列车已与多辆列车建立了实时数据通信链路,在虚假数据注入攻击的影响下,作为数据接收方的多辆列车会同时收到被篡改过的速度输出和位置数据。受到攻击的速度
v_j^a 和位置数据p_j^a 可表示为\left\{\begin{gathered} v_j^a = {v_j} + \omega {a_v} \\ p_j^a = {p_j} + \omega {a_p} \\ \end{gathered} \right. (4) 式(4)中,
{a_v} 和{a_p} 分别表示叠加在列车i 的实际速度和位置输出值上的攻击值。在攻击注入的情况下,列车之间的一致性也会受到影响。以列车
i 为例,速度和位置跟踪偏差的计算过程受到攻击的影响,导致跟踪偏差的计算结果与攻击数据叠加。在这种情况下,列车i 的跟踪误差表示为{e_i}^v = ({v_0} - {v_i}) + \sum\limits_{j \in {N_i}} {({v_j} - {v_i})} + {d_i}{a_v} (5) {e_i}^p = \sum\limits_{j \in {N_i}} {({p_j} - {p_i})} - {d_i}({\lambda _{ij}}{d_0} + {a_p}) (6) 其中,
{d_i} 表示列车i 的相邻车的数量。2.2 基于回声状态网络的异常检测方法
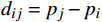
考虑到自组织网络系统中传输的速度和位置信号是时间序列信号,因此选择回声状态网络进行异常检测。回声状态网络也称为储备池计算,其核心思想是利用大规模随机稀疏网络(储备池)作为信息处理介质,将输入信号从低维输入空间映射到高维状态空间,如图3所示。采用线性回归方法在高维状态空间中训练网络的某些连接权重,而其他随机连接的权重在网络训练过程中保持不变。因此,与包括长短期记忆网络在内的其他类型的循环神经网络相比,回声状态网络具有训练速度快、能耗低等优点。
回声状态网络用于学习重构正常输入信号。将回声状态网络的输出与原始输入信号之间的差异,即重构误差,作为检测指标。由于回声状态网络只学习重构正常信号,不会学习异常信号,因此,当输入是异常信号时,重构误差会变大。当重构误差超过设定的阈值时,判定信号异常。
3 仿真实验
3.1 仿真环境与参数设置
本文搭建MATLAB/Simulink平台,模拟重载群组列车在实际运行中的多种工况,包括正常运行和遭受虚假数据注入攻击的情况。仿真在配备Intel Core i7处理器和16 GB内存的计算机上运行,使用MATLAB R2023a和Simulink进行建模。
选取自组织网络系统在正常运行状态下记录的各列车速度和相对位置数据作为标准良性样本,而将注入了虚假数据的列车速度或位置传感器读数视为恶意数据样本。使用 500 组列车正常运行数据进行模型训练,每组数据包含 500 个采样点,覆盖列车在匀速行驶、加速和减速等不同运行状态下的速度和相对位置信息;回声状态网络模型包含 100 个内部节点,这些节点通过随机生成的稀疏连接权重矩阵相互连接,确保其具有良好的动态特性和记忆能力。在仿真过程中,列车的正常运行速度范围设定为 50~100 km/h,列车间的安全距离设定为200 m;为了模拟异常情况,设计了多种虚假数据注入攻击场景,包括对速度传感器和位置传感器的攻击,以及通信链路的干扰;攻击的持续时间设定为10 s,虚假数据的振幅根据具体攻击类型调整,范围为2~10。
3.2 仿真结果分析
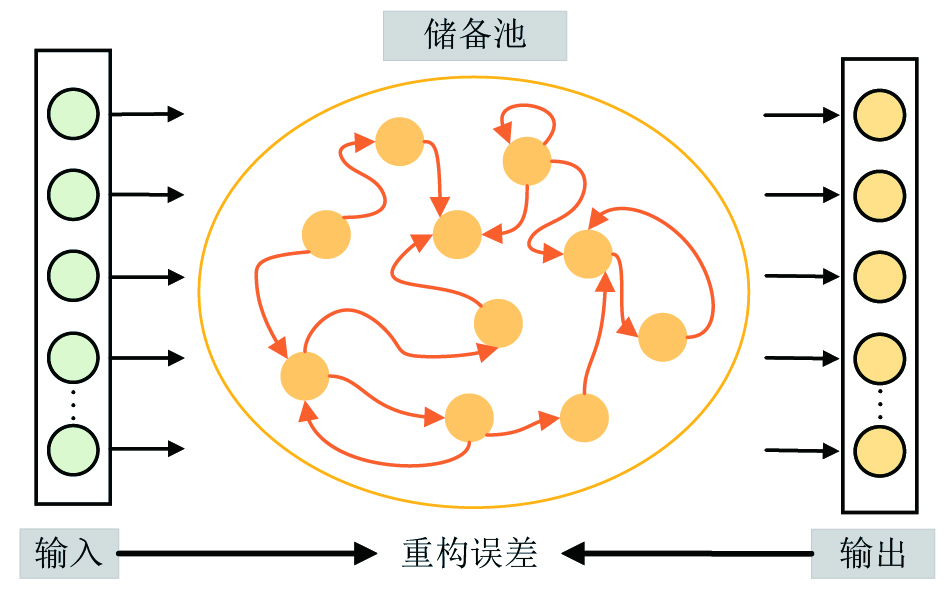
图4展示了群组内3列列车在
1000 s连续时间段内的速度及相对位置变化趋势,其中在t≤400 s时,数据完全反映列车在匀速行驶、加速或减速等正常运行状态下的表现,属于典型的良性数据集。而当t>400 s时,所展示的数据则是模拟了在遭受虚假数据注入攻击后,列车速度和相对位置发生变化的情形,这部分数据被视为恶意数据,用于检验回声状态网络模型对异常情况的检测能力。上述攻击的持续时间为10 s。当t=400 s时,模拟攻击者攻击列车2速度传感器的数据传输链路,导致原始数据叠加振幅为2的虚假数据。当t=500 s时,攻击列车2的位置数据传输链路,并注入幅度为10的虚假数据。当t=600 s时,列车1和列车2之间的通信链路受到攻击,并注入幅度为3的虚假数据。当t=700 s时,列车2到列车3的通信链路受到攻击,并注入幅度为10的虚假数据。在t=800 s时,发起平衡攻击[8],即向列车1的速度传感器注入+2,向列车3的速度传感器注入-2。当t=900 s时,对列车1和列车3发起位置平衡攻击,分别注入+2和−2的虚假数据。
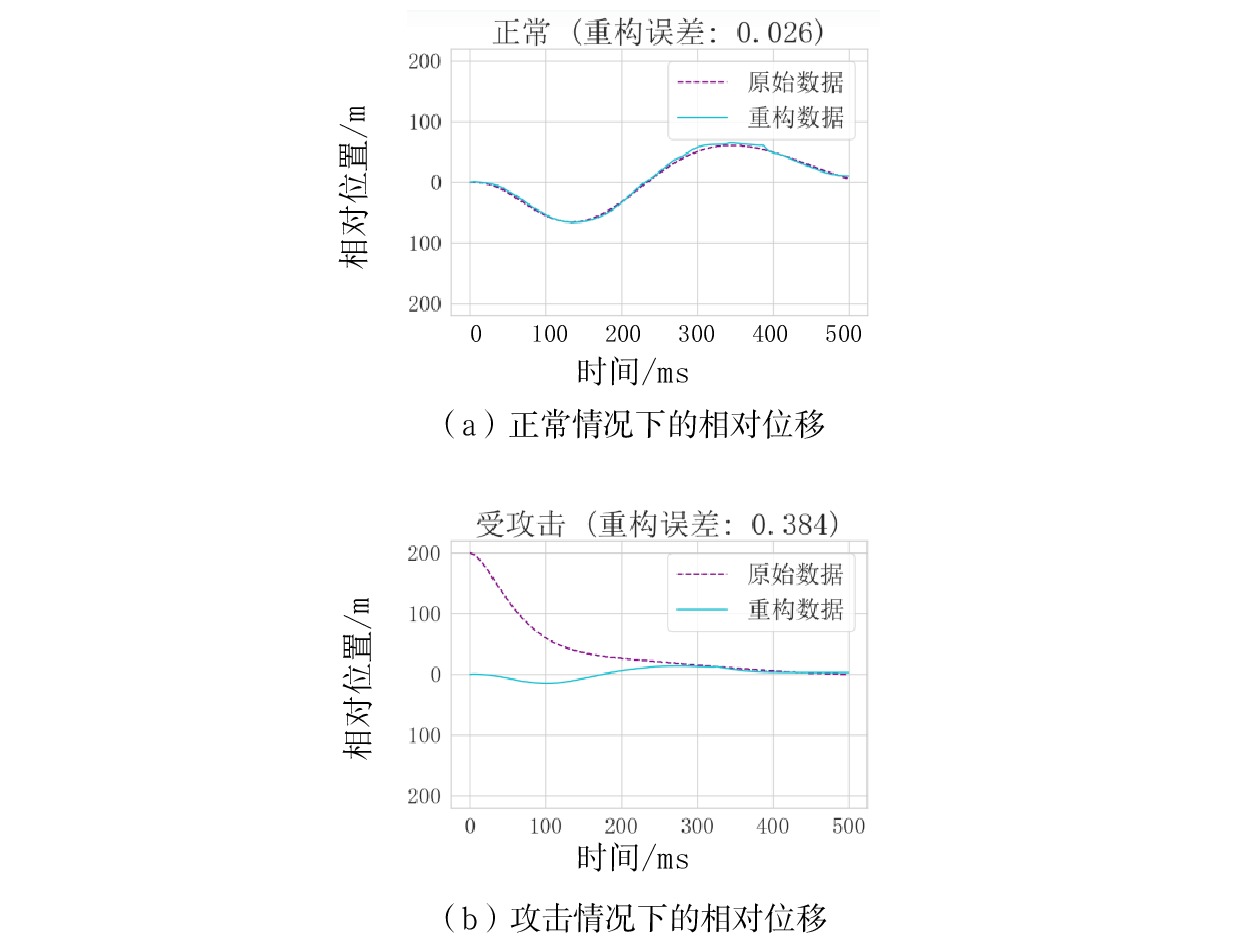
当列车受到攻击、加速、减速时,其相对距离在200 m安全距离附近有不同程度的波动。因此,选择列车相对位置数据作为特征来训练回声状态网络模型。实验使用500组列车正常运行数据,每组500个采样点来训练模型。利用攻击数据和其他正常运行数据来验证模型的检测效果。以回声状态网络的重构误差作为检验模型的指标。重构误差由模型输入数据和重构数据的均方误差(MSE)表示。检测阈值设置为0.2,检测结果如图5所示。
可以看出,当回声状态网络模型的输入数据为正常数据时,重构数据的曲线与原始数据基本重合,MSE较小,表明训练后的回声状态网络模型能够很好地重构正常数据。但当出现异常且模型的输入数据为攻击数据时,MSE比较大,超过阈值,这意味着模型可以检测到攻击的存在。
4 结束语
本文研究了重载群组列车自组织网络系统的安全高效运行问题,设计了协同控制策略以优化列车间距并确保安全。为应对虚假数据注入攻击威胁,构建了信息物理模型并采用回声状态网络进行异常检测。仿真结果表明,该方法在攻击发生时能准确检测到异常信号,从而增强了重载群组列车自组织网络系统的安全防御能力,同时保证了其运行效率。
下一步将致力于开发更为先进的回声状态网络算法,以提高对复杂攻击模式的识别能力,并探索将这些算法集成到现有的铁路安全协议中,以增强自组织网络系统的实时监控和自我修复能力。同时,将考虑算法的计算效率和实际部署的可行性,确保技术解决方案既经济又实用。
-
[1] 朱爱红,田晓晴,何明明. 列车大小交路通信协同运行自适应控制方法[J]. 铁道科学与工程学报,2024,21(3):969-979. [2] 何 晖,代 萌,陶维杰,等. 基于多智能体的重载列车虚拟编组协同巡航控制[J]. 中国铁道科学,2023,44(6):196-205. DOI: 10.3969/j.issn.1001-4632.2023.06.20 [3] 张英贵,赵明慧,张云丽. 面向虚拟连挂的城轨列车群组追踪运行仿真研究[J]. 交通运输系统工程与信息,2024,24(1):199-209. DOI: 10.16097/j.cnki.1009-6744.2024.01.020. [4] Rong J Q, Liu W R, Yu X Q, et al. A few-shot learning approach for anomaly detection in cooperative tracking control system[C]//2023 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking, 21-24 December, 2023, Wuhan, China. New York, USA: IEEE, 2023:803-808.
[5] Liu Y, Ning P, Reiter M K. False data injection attacks against state estimation in electric power grids[C]//16th ACM Conference on Computer and Communications Security, 9-13 November, 2009, Chicago, USA. New York, USA: ACM, 2009:21-32.
[6] Guo H B, Pang Z H, Li C. Side information-based stealthy false data injection attacks against multi-sensor remote estimation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 1054-1056. DOI: 10.1109/JAS.2023.124086
[7] Ren X X, Yang G H. Adaptive control for nonlinear cyber-physical systems under false data injection attacks through sensor networks[J]. International Journal of Robust and Nonlinear Control, 2020, 30(1): 65-79. DOI: 10.1002/rnc.4749
[8] Long J Y, Zhang S H, Li C. Evolving deep echo state networks for intelligent fault diagnosis[J]. IEEE Transactions on Industrial Informatics, 2020, 16(7): 4928-4937. DOI: 10.1109/TII.2019.2938884
 下载:
下载:
























































计量
- 文章访问数: 24
- HTML全文浏览量: 2
- PDF下载量: 4
