

Intelligent self-propelled operation and maintenance equipment management information system for catenary
-
摘要:
为了全面提升接触网智能运营维护(简称:运维)能力,开展接触网智能自轮运维装备管理信息系统研究。文章从装备组成、作业流程等方面,剖析接触网智能自轮运维装备特点,构建该系统的总体架构、数据架构、技术架构与网络架构,介绍该系统的主要功能,以及数据空间构建、云边端协同、测评修一体化等关键技术。测试结果表明,该系统能够以模数一体的方式驱动接触网智能自轮运维装备车组开展维修作业,从节约人力、保障安全等多个方面实现了接触网智能运维能力的全面提升。
Abstract:To comprehensively enhance the intelligent operation and maintenance capabilities of the catenary, this paper conducted research on the intelligent self-propelled operation and maintenance equipment management information system for the catenary, analyzed the characteristics of intelligent self-propelled operation and maintenance equipment for the catenary from the aspects of equipment composition and operation processes, constructed the overall architecture, data architecture, technical architecture, and network architecture of the system, introduced the main functions of the system, as well as key technologies such as data space construction, cloud edge collaboration, and integrated testing, evaluation, and maintenance. The test results show that the system can drive the intelligent self- propelled operation and maintenance equipment of the catenary to carry out maintenance operations in a modular integrated manner, implement comprehensive improvement in the intelligent operation and maintenance capabilities of the catenary from multiple aspects such as saving manpower and ensuring safety.
-
我国铁路积极推进智能高速铁路(简称:高铁)的研究与建设,在高铁智能建造、智能装备及智能运营等领域取得显著成效,目前,正在向智能高铁2.0阶段演进[1-2]。在数字化发展的趋势下,数据、模型双驱动与专业技术融合将成为检测评估、运营维护(简称:运维)、高端装备等领域智能化提升的重要手段[3-7]。
接触网作为铁路牵引供电系统的重要组成部分,不仅承受高速受电弓的机电冲击荷载,还长期经受寒冷、高温、高原、大风、腐蚀等复杂恶劣环境的考验。我国接触网维修模式经过多次演变,现采用“运行、检测、维修”分开和集中修的组织模式[8-11]。然而,当前维修决策方法存在一定主观性,导致检修工作强度高,且漏修、过修与失修等问题仍有发生,接触网仍然存在一定安全风险。
基于上述情况,研究人员针对牵引供电系统已经开展数字孪生技术研究[12],并结合BIM(Building Information Modeling)技术提出数据全生命周期融合应用方法[13-14];接触网配备铁路供电安全检测监控系统(6C系统)等故障缺陷识别信息化工具[15],且在智能运维领域已有作业机器人应用案例[16]。通过综合运用精确检测诊断、寿命准确预测及机器人自主作业等技术,构建接触网智能化自轮运维装备车组,依托自轮运维平台即时快速识别并自主处理直接影响运营安全的重大故障/缺陷,实现即检即修,这是铁路数字化、智能化发展背景下接触网维修的重要发展趋势[17]。接触网智能化自轮运维装备车组的运用需要基于模型数据一体化理念,确保数据覆盖维修全流程,并在自轮运维装备车组边缘独立实现检测监测、机器人作业及车组运行管理。因此,为接触网智能自轮运维装备构建一套管理信息系统十分必要。
综上,本文设计接触网智能自轮运维装备管理信息系统(简称:管理信息系统),以维修全流程数据驱动为核心,融合数据空间构建、云边端协同、测评修一体化等关键技术,通过信息技术支撑接触网智能自轮运维装备车组运用,实现节约人力成本、保障作业安全,通过智能运维提升接触网可靠性的目的。
1 接触网智能自轮运维装备简介
1.1 装备组成
将智能感知识别设备、自主维修作业机器人集成到接触网维修作业车,以具备机器人自主维修作业能力为核心,为作业车研发定位就位、稳定性保持等装备,按照解构−组合技术构建接触网智能自轮运维装备车组,其整体组成示意如图1所示。
1.2 作业流程
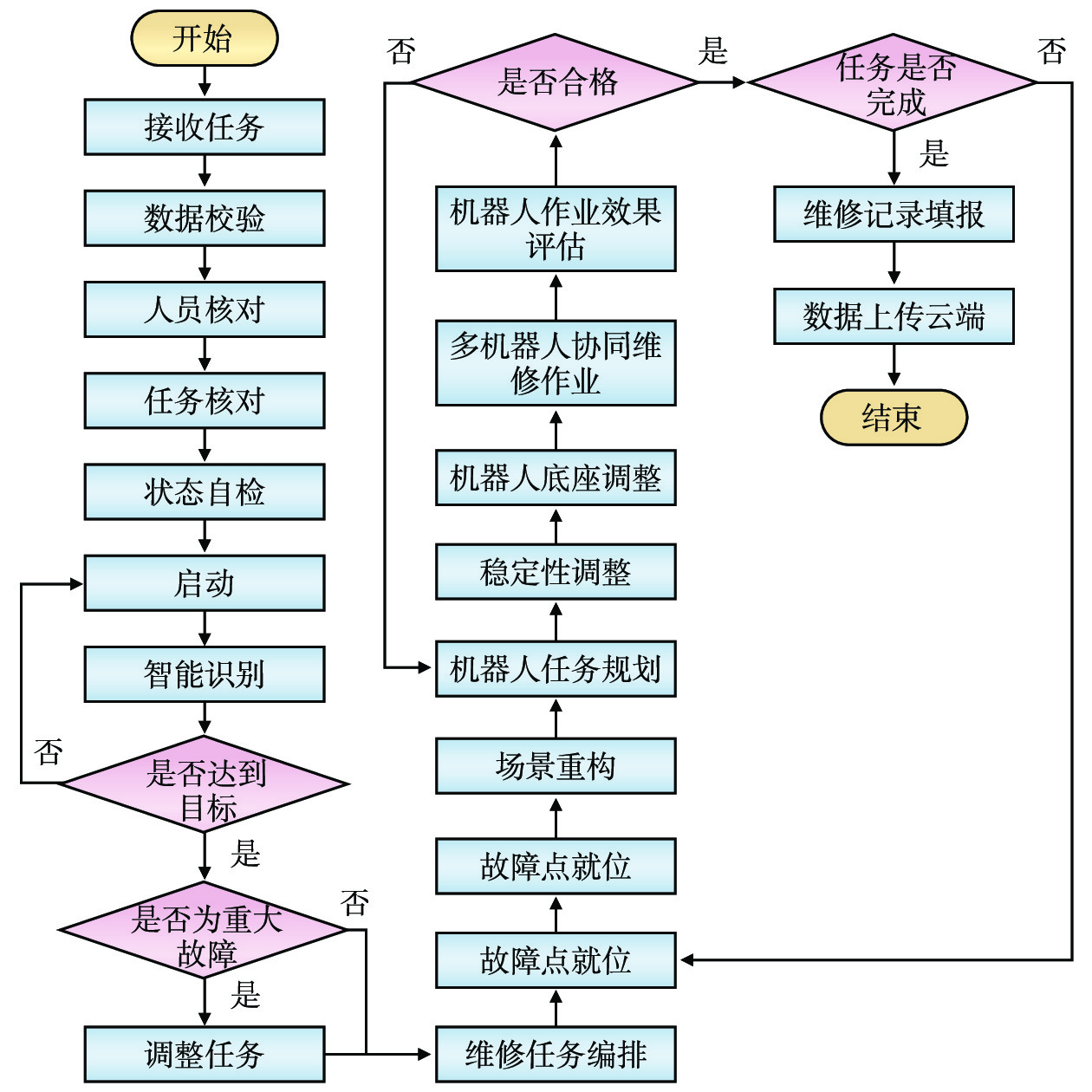
接触网智能自轮运维装备车组具备独立检测、计划修及即检即修等3种作业模式。接触网智能自轮运维装备车组即检即修作业流程如图2所示。
2 系统架构
2.1 总体架构
按照云边端协同计算架构进行管理信息系统总体架构设计,边缘和终端高度集成,共同部署于接触网智能自轮运维装备车组。管理信息系统总体架构如图3所示。
2.1.1 云层
云层主要由云计算、云存储等基础设施组成,云平台管理对全局数据统一存储及管理,具备云层级的缺陷识别、寿命分析、维修决策制定功能,为机器人控制提供维修场景基础模型库。同时,在云层设置与铁路局集团公司智能维修、6C等系统的接口。
2.1.2 边缘层
边缘层由边缘计算节点与边缘控制器组成,边缘控制管理实现对各类终端统一控制管理与数据汇集,完成检测监测数据的边缘处理识别,研判重大故障/缺陷并制定相应维修决策,为机器人控制提供场景重构及任务规划。
2.1.3 终端层
终端层主要由软、硬件一体化智能设备组成,包括智能感知识别设备的各类感知终端、机器人维修作业终端装备以及用于车组运行定位、就位及稳定性保持的终端等。各类终端独立实现检测监测数据获取、自主维修作业等功能。
2.2 数据架构
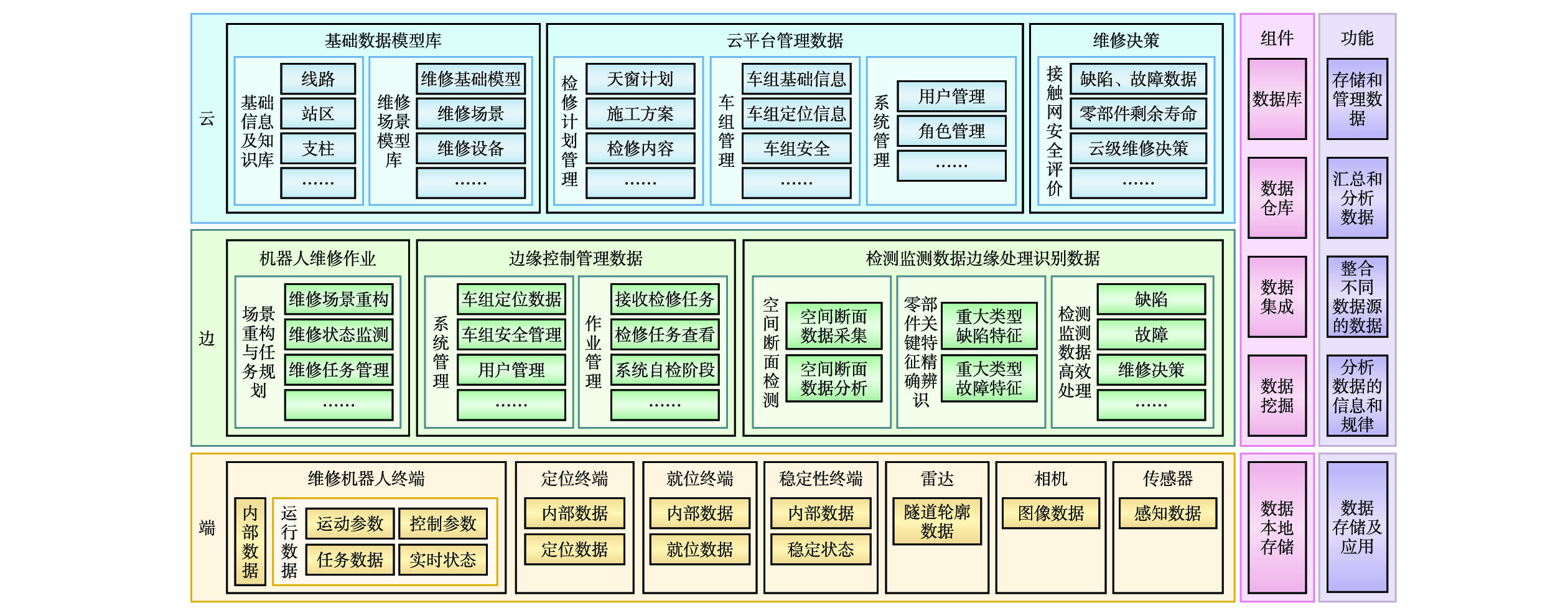
管理信息系统数据架构如图4所示。其中,云、边层级在统一架构下支持数据统一存储、交互,终端层级的数据在本终端内存储与应用。
2.2.1 端层数据
端层数据由终端设备采集,经初步处理后传输至边缘层。其中,检测监测终端数据包含雷达采集到的隧道轮廓、相机采集到的图像及传感器感知的数据等;维修机器人终端数据包含机器人运动参数、控制参数、任务数据与实时状态数据等;车组配套终端数据包含定位数据、就位数据、稳定性保持状态数据等。
2.2.2 边层数据
边层数据为对各类终端现场统一采集与处理的数据,并与云层数据进行交互。其中,边缘控制管理数据包含接触网智能自轮运维装备车组的系统管理与作业管理等数据;检测监测边缘处理识别数据主要包含空间断面检测数据、零部件关键特征精确辨识数据,以及高效处理后的缺陷、故障、维修决策等数据;机器人维修作业数据主要为场景重构数据与任务规划数据。
2.2.3 云层数据
云层对全局数据进行集中存储、管理。其中,云平台管理数据包含检修计划管理、车组管理、系统管理等数据;维修决策方面数据包含云平台级别的接触网缺陷/故障、零部件剩余生命、云级维修决策等安全评价数据;基础数据模型库则包含了整个系统的基础信息,以及知识库与机器人维修作业方面的维修场景模型库。
2.3 技术架构
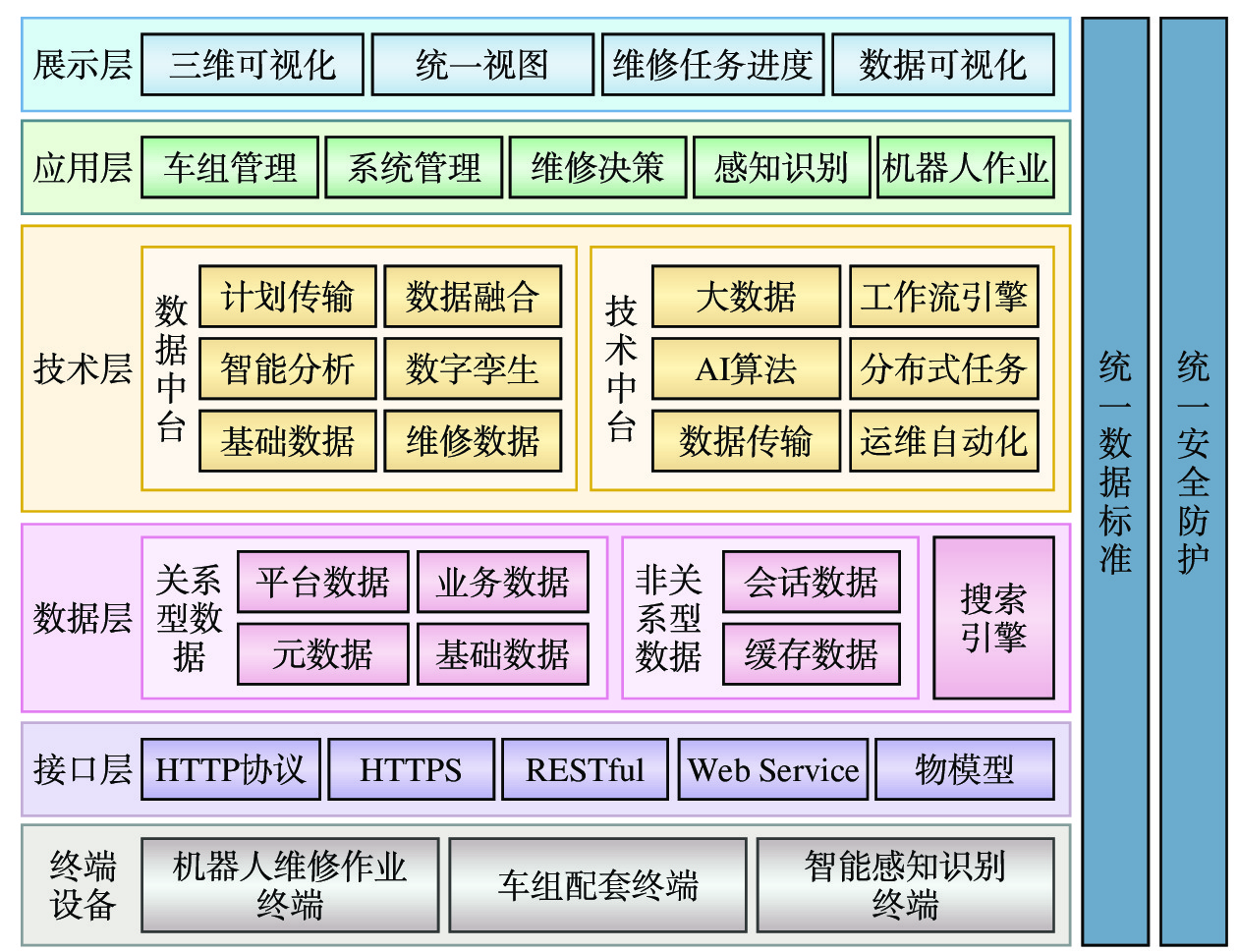
管理信息系统采用基于Java标准框架的多层次系统结构体系,其技术架构如图5所示。
2.3.1 展示层
展示层支持三维可视化、统一视图、维修任务进度及数据可视化等多种展示方式,实现用户操作与数据交互。
2.3.2 应用层
应用层实现将维修决策、智能感知识别、机器人作业、车组管理、系统管理等业务能力组装,形成完整的业务逻辑。
2.3.3 技术层
技术层主要包含数据中台和技术中台,利用数据挖掘、数据融合等微服务,封装业务逻辑形成领域模块,各模块以微服务形式存在。
2.3.4 数据层
数据层包括数据库、数据集成及数据搜索等组件,针对关系型数据、非关系型数据,分别进行存储、管理、汇总、分析和整合。
2.3.5 接口层
接口层采用HTTP、HTTPS及物联网模型等接口协议,使管理信息系统能够接收终端及外部的请求和数据,实现与外部系统的互联互通。
2.3.6 终端设备
终端设备包括机器人维修作业终端、车组配套终端、智能感知识别终端,通过统一接口接入管理信息系统。
2.4 网络架构
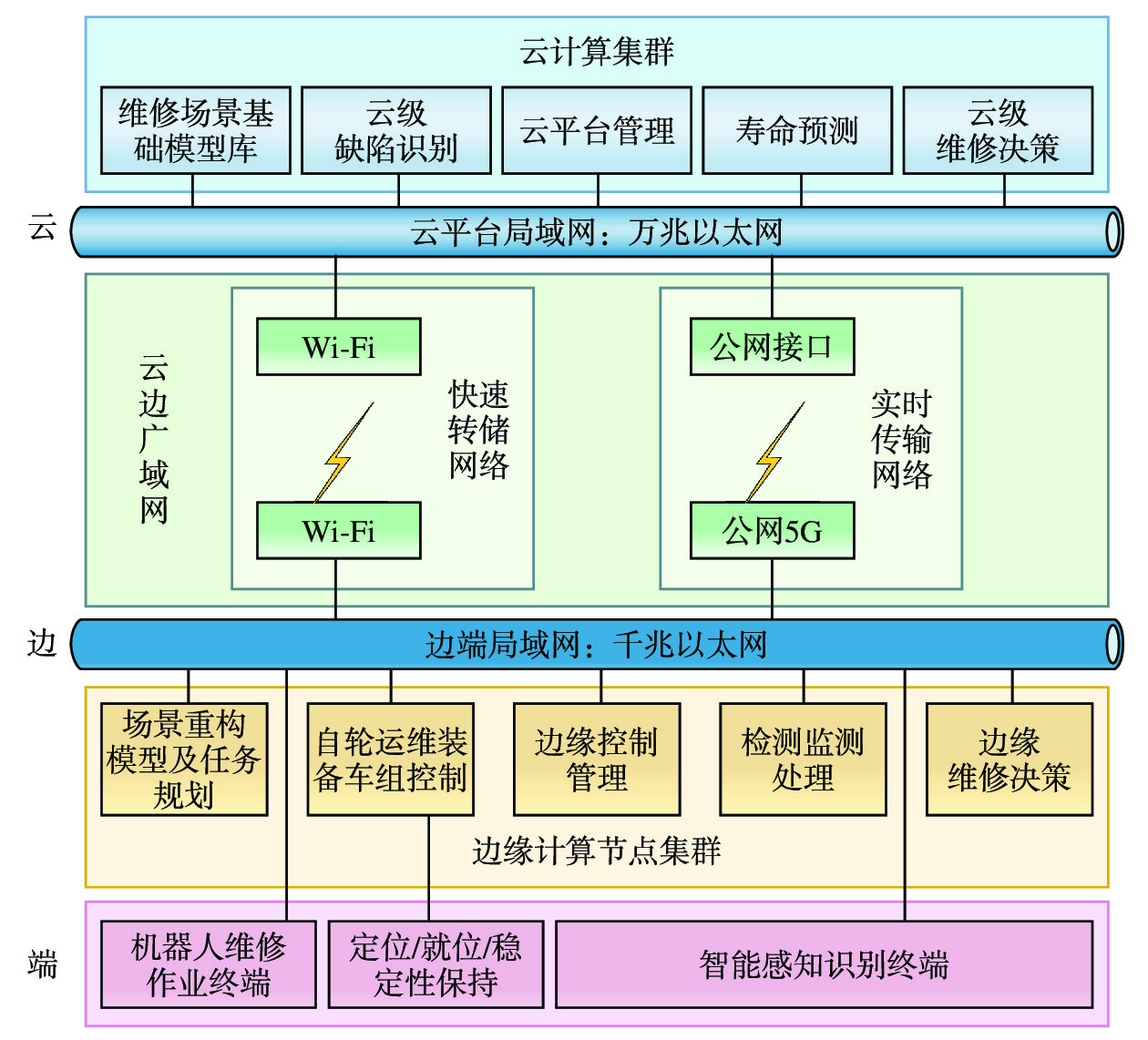
接触网智能自轮运维装备管理信息系统网络架构如图6所示。
2.4.1 云平台局域网
云平台局域网采用万兆以太网组建,支持各类服务器、存储设备组成云计算集群。
2.4.2 边端局域网
边端局域网采用千兆以太网组建,支持各类服务器、存储设备组成边缘计算节点集群,并支持各类终端接入。
2.4.3 云边广域网
云边广域网分为云、边数据实时传输网与海量数据快速转储网。云、边数据实时传输网初期采用5G移动通信公网实现,具备切换至铁路专用无线通信系统承载能力;海量数据快速转储网初期选用Wi-Fi技术构建点对点高速无线通道,可以进一步采用毫米波构建更加快速无线通道。
3 系统功能
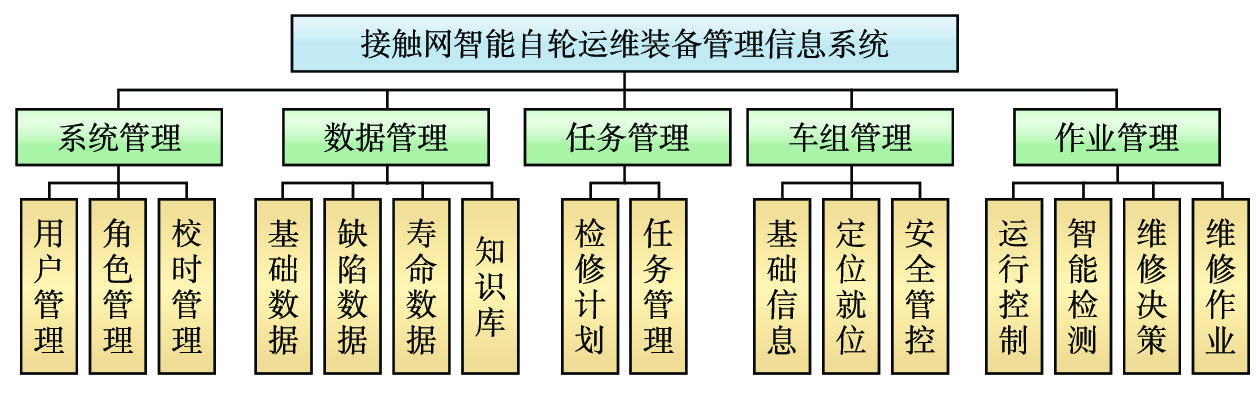
接触网智能自轮运维装备管理信息系统功能如图7所示。
3.1 系统管理
包含用户管理、角色管理及校时管理。用户管理支持新增用户名及登录系统的账号设置;角色管理支持新增角色及登录系统的角色设置,可对不同的账号进行角色分配与权限设置;校时管理提供时间统一校对服务,便于统一数据操作、存储时间。
3.2 数据管理
包含基础数据、缺陷数据、寿命数据及知识库管理。基础数据管理主要实现线路、一杆一档、行政机构、站区等基础数据的统一维护管理;缺陷数据管理实现缺陷类型、缺陷等级、样本库、问题库、研判模型的增、删、改、查;寿命数据管理实现零部件记录管理,以及寿命预测数据管理及可视化展示;知识库实现BIM模型、维修场景模型、维修故障、维修工艺、维修设备数据及文件的管理。
3.3 任务管理
包含检修计划和任务管理。检修计划显示管理检修任务计划的清单,展示计划开始/结束时间以及计划审核状态等;任务管理包括正在执行或者已执行完成的检修任务清单,展示任务时间节点、任务进度状态等。
3.4 车组管理
包含基础信息管理、定位就位管理和安全管控。基础信息管理支持对车组信息进行增、删、改、查;车组定位就位管理支持展示车组的定位、就位数据,包括时间、经纬度、控车状态、车速等;车组安全管理实现对车组载具、稳定状态和机器人状态的安全监测。
3.5 作业管理
包含运行控制、智能检测、维修决策与维修作业。运行控制实现车组作业全流程的控制管理,包括作业流程编排、数据交互及状态检查等;智能检测控制智能感知识别终端,实现接触网检测监测,并分层级对故障/缺陷进行研判;维修决策在云、边分层进行维修决策判断并输出维修任务;维修作业根据维修任务,通过维修场景选择、快速重构、任务规划、执行控制与维修质量判断等流程,控制机器人进行自主维修作业。
4 关键技术
4.1 数据空间构建
接触网智能自轮运维装备车组完成维修作业全流程需要运用海量多源多维异构数据,这些数据来源多样,维度覆盖一维传感、二维图像、三维空间,并以结构化、非结构化、半结构化等形式存储,管理调用难度大。为保障核心数据在接触网智能自轮运维装备维修各环节中顺畅流转,与控制管理指令深度融合,支撑全套智能维修流程,本文在管理信息系统中构建接触网运维的数据空间,采用数字孪生体的基本思路,对多源多维异构数据进行统一组织、管理与运用。数据空间构建流程如图8所示。
(1)基于BIM+GIS(Geographic Information System)的铁路模型构建方法,构建包含铁路接触网几何信息、设备信息及建筑信息的基础模型。
(2)设定维修主体接触网设备设施的全局ID,并基于此构建结构化数据库,横向扩展各类检测监测、维修作业、车组运行数据,纵向按照不同时间阶段保存全生命周期数据,对不同来源、维度的数据统一索引和管理,以数模一体的模式承载全流程全数据。
(3)以铁路里程为核心制定项目的统一坐标表达,结合数据产生时刻的时间戳实现全流程数据在时空尺度的对齐。基于接触网智能自轮运维装备在物理作业流程中各类设备数据运用需求制定数据流转规则,实现维修全流程的数据驱动。
4.2 云边端协同
目前,铁路列车至地面数据中心的网络运力受限,接触网智能化自轮运维装备车组在集成智能感知设备、自主维修机器人时,需要具备脱离云端算力实现其运行现场控制、管理、协同的能力。本文通过分析数据计算、存储特点及现场设备应用需求,以云边端协同技术架构构建整个管理信息系统,通过云边端协同实现既有条件下算力、存力、运力的合理分配,同时兼顾云端海量数据处理与现场有限算力下低延时、高可靠处理需求。
(1)在接触网智能化自轮运维装备车组构建边缘平台,以接触网智能化自轮运维装备车组运行时具备独立协调各类设备完成检测、运行、维修的测评修一体化作业功能为核心,将大算力、大存力、非实时业务向云端集中;实时性高、可独立完成的业务向终端分配。使得各项功能划分到云边端各层级协同处理,合理利用云平台、边缘平台、各类终端的算力、存力。
(2)将云边数据交互划分为小容量实时数据传输与海量数据转储,构建云边实时交互网络及快速转储网络来满足运力需求。
4.3 测评修一体化
接触网“运行—检测—维修”分离的维修模式导致了数据孤岛,同时既有维修决策方法存在一定主观性,需要从数据贯通、提升安全评估能力等方面解决。
(1)通过建立云边端数据分层处理与协同机制,实现数据对维修流程的全覆盖与支持,以全新的接触网智能化自轮运维装备车组边端一体化平台与云平台实现数据全面贯通,打破“运行—检测—维修”分离造成的信息孤岛,支撑接触网维修的全流程数据驱动。
(2)建立以状态精确诊断和寿命准确预测为基础的安全评估体系。通过模糊判断、缺陷分级等方法制定智能维修策略,避免维修决策的主观性,同时,将重大故障/缺陷进行划分,提出即时处理需求。
(3)通过云边端功能合理划分,在接触网智能自轮运维装备车组边缘的重大故障/缺陷进行快速识别、现场维修决策和机器人自主处理能力,实现测评修一体化维修模式。
5 应用试验
5.1 集成部署
在邯黄(邯郸—黄骅港)铁路冀州车站练兵场搭建接触网智能自轮运维装备试验线,包含接触网故障/缺陷模拟、环境模拟等主要维修场景,对管理信息系统进行集成部署与测试验证。在接触网智能自轮运维装备上部署边缘平台,在地面机房部署虚拟云平台,集成部署情况如图9所示。
5.2 试验效果
通过在试验线进行应用测试,验证了管理信息系统对接触网智能自轮运维装备车组运用的驱动能力。
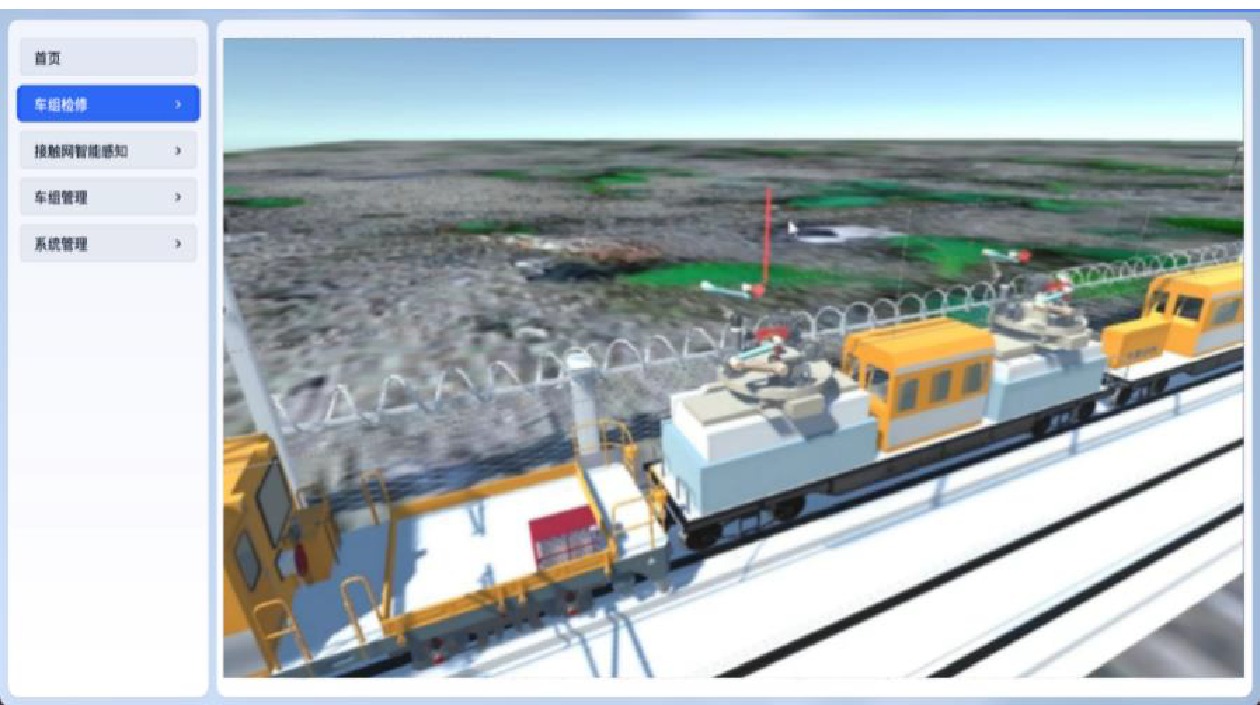
(1)管理信息系统驱动智能自轮运维装备车组,在试验线完成了接收检修计划、系统自检、启动作业、检测监测、人工复核、即检即修、检修返程、检修结束的作业全流程,如图10所示。
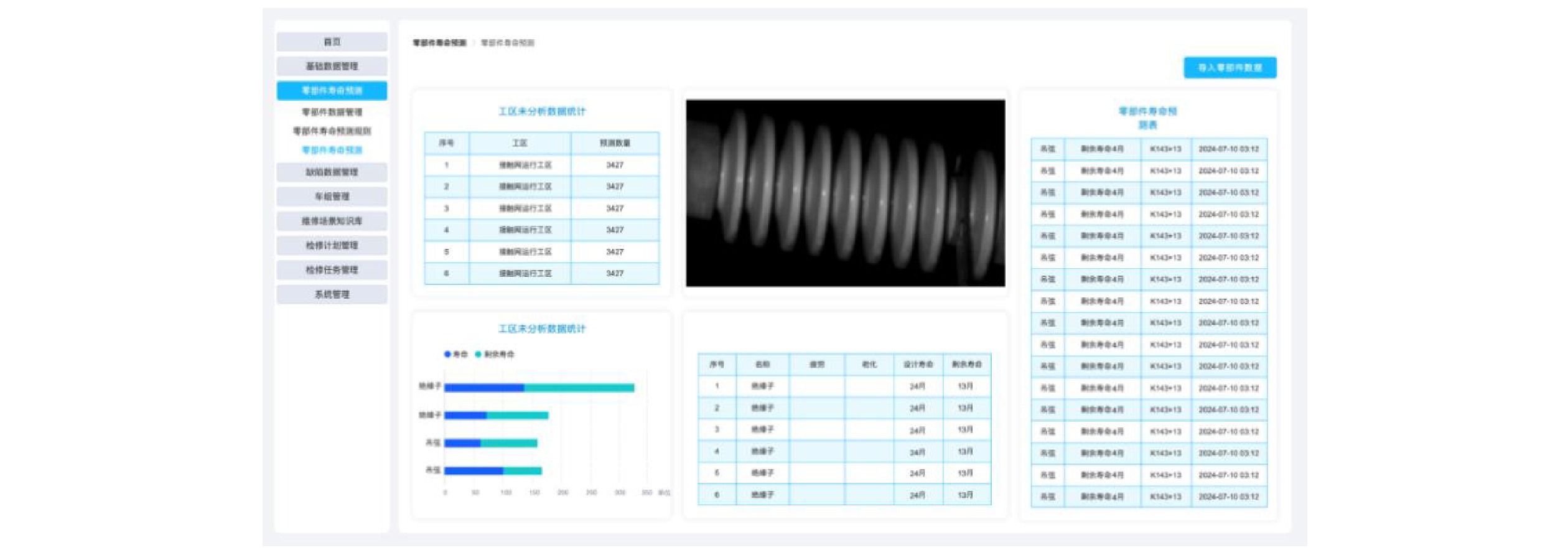
(2)在云平台根据零部件寿命数据进行可视化预测数据展示,通过照片、图表、条形图等展示形式,全面对零部件寿命数据进行表达,零部件寿命展示界面如图11所示。
(3)在边缘平台根据维修任务,在现成进行维修作业场景的快速重构,驱动车组就位至故障点、抬升稳定性保持平台并锁定、机器人自主完成维修作业,现场维修作业执行界面如图12所示。
6 结束语
本文分析了接触网智能运维的发展趋势,基于数模一体理念,采用“云边端”协同和“测评修”一体化等技术设计了接触网智能自轮运维装备管理信息系统,并进行集成部署与应用试验,从节约人力、保障安全等多角度实现了接触网智能运维能力的全面提升。未来,将结合接触网智能自轮运维装备车组整体功能的完善与提升,持续优化管理信息系统,并进一步开发接触网智能维修系统、6C系统等既有系统的数据接口,使接触网智能自轮运维装备更好地融入现行运维管理流程。
-
[1] 王同军. 中国智能高速铁路2.0的内涵特征、体系架构与实施路径[J]. 铁路计算机应用,2022,31(7):1-9. DOI: 10.3969/j.issn.1005-8451.2022.07.01 [2] 王同军,王万齐,李 平,等. 模数一体化平台赋能下的智能高铁2.0关键技术展望[J]. 中国铁路,2024(7):1-6. [3] 王同军,蒋 辉,尤明熙,等. 基于模数驱动的高速铁路线路设备状态检测评估技术与实践[J]. 铁道运输与经济,2024,46(9):1-14. [4] 陈华鹏,鹿守山,雷晓燕,等. 数字孪生研究进展及在铁路智能运维中的应用[J]. 华东交通大学学报,2021,38(4):27-44. [5] 高士根,周 敏,郑 伟,等. 基于数字孪生的高端装备智能运维研究现状与展望[J]. 计算机集成制造系统,2022,28(7):1953-1965. [6] 李聪旭,李 平,李 樊,等. 铁路数字空间底座架构设计及关键技术[J]. 中国铁路,2024(7):195-206. [7] 赵 耀. 智慧轨道交通云边端协同系统关键技术研究[J]. 铁路通信信号工程技术,2024,21(7):41-48. DOI: 10.3969/j.issn.1673-4440.2024.07.007 [8] 李劲松. 以可靠性为中心的接触网维修策略研究[D]. 成都:西南交通大学,2017. [9] 张 韬,刘玉辉. 《高速铁路接触网运行维修规则》编写与创新实践[J]. 中国铁路,2016(12):20-24. DOI: 10.3969/j.issn.1001-683X.2016.12.005 [10] 郭尚坤. 浅谈基于PHM技术的高速铁路接触网设备维修策略[J]. 电气化铁道,2019,30(6):86-89. [11] 刘再民. 高速铁路接触网维修规则框架与管理技术创新[J]. 中国铁路,2016(4):13-16. DOI: 10.3969/j.issn.1001-683X.2016.04.003 [12] 高仕斌,刘帝洋,韦晓广,等. 基于数字孪生网络的牵引供电智能运维体系与应用架构[J]. 铁道学报,2023,45(12):1-15. DOI: 10.3969/j.issn.1001-8360.2023.12.001 [13] 李 平,李 瑞,张 雪,等. 基于BIM技术的高铁接触网全生命周期管理研究[J]. 铁路计算机应用,2024,33(11):44-48. DOI: 10.3969/j.issn.1005-8451.2024.11.08 [14] 赵 耀,彭 涛,袁 强,等. 规划设计阶段数字孪生牵引供电系统数据融合方法及应用研究[J]. 铁道标准设计,2024,68(10):176-183. [15] 乔凯庆,汪海瑛,王 婧,等. 基于6C系统大数据分析的接触网零部件缺陷特征研究[J]. 中国铁路,2023(7):39-44. [16] 马逸飞,方 野,薛笑寒,等. 面向铁路智能运维特殊作业的机器人数字孪生系统设计与实现[J]. 数字技术与应用,2023,41(8):146-149. [17] 周启斌,王震宇,武 鹏. 接触网智能自轮运维装备车组解构-组合技术研究[J]. 电气化铁道,2025,36(2):92-95.

 下载:
下载:




计量
- 文章访问数: 38
- HTML全文浏览量: 9
- PDF下载量: 10
