

国产大模型如何引领铁路智能化发展
-
摘要:
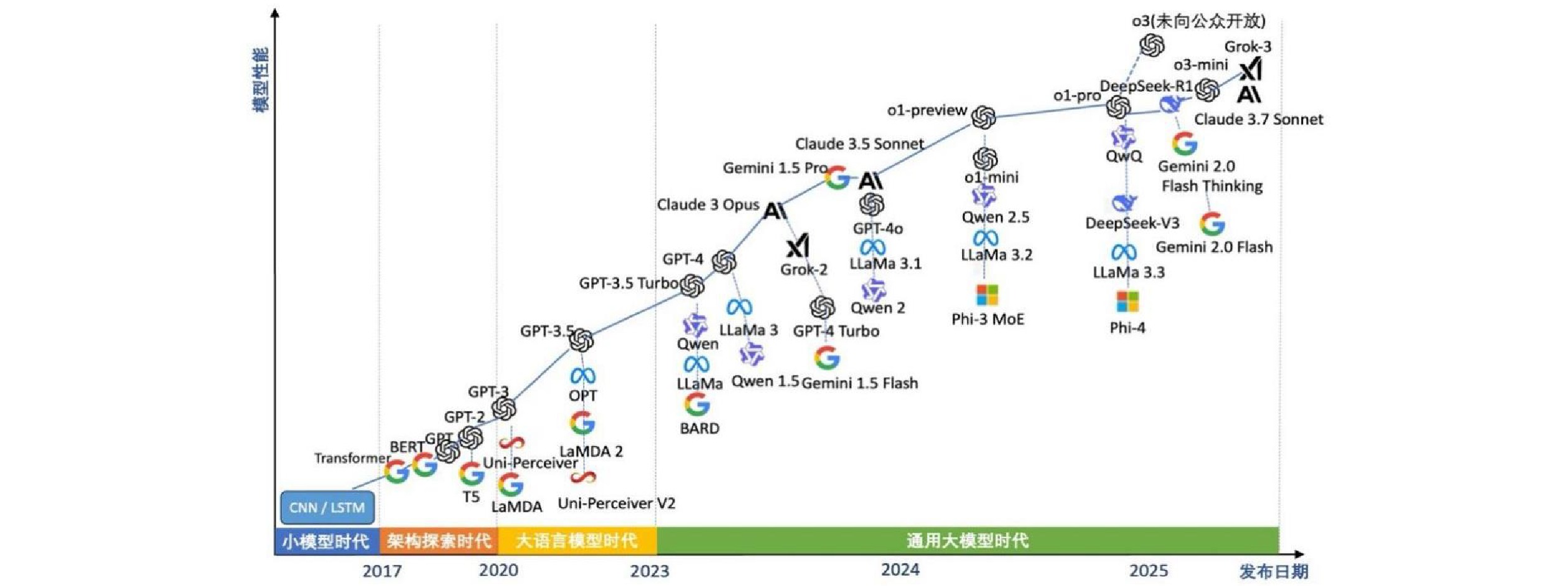
人工智能技术蓬勃发展,尤其以大模型为代表的生成式人工智能进步更加引人瞩目。2025年初,DeepSeek大模型成为国内外科技界的瞩目焦点,其卓越的技术创新和深度思考能力在多个业务领域表现出强大的应用潜力,人工智能技术已逐步从感知智能走向认知智能,从弱人工智能走向强人工智能。
-
中老(中国—老挝)铁路是我国“一带一路”倡议与老挝“变陆锁国为陆联国”战略的对接项目,全线采用我国设备和标准,国外段与国内段铁路网直接相连,实现了铁路跨境的互联互通[1]。2021年12月3日,中老铁路跨境旅客列车开通,采取朝发夕至运行模式,每日双向对开各1列,全程经停昆明南、普洱、西双版纳、磨憨、磨丁、琅勃拉邦、万荣、万象共8个车站,昆明—万象可实现当日通达[2],极大推动了两国旅游等产业发展,对共建“一带一路”高质量发展具有十分重要的意义[3]。为全面支撑中老铁路跨境旅客运输,满足跨国界的运营特点和旅客的多样化需求,亟需设计适应中老铁路跨境旅客运输的客票系统方案,研发支持国际联运的客票系统,推动区域交流发展,为旅客带来更加舒适、便捷的出行体验。
中老铁路跨境列车的开通对客票系统建设、铁路运营管理等方面都提出了新的需求与挑战,包括客观环境、使用群体和业务模式等3个方面。
(1)客观环境。老挝是一个中低收入国家,经济主要依赖于农业[4],地形地貌多样,基础设施不完善,部分城市公路崎岖,交通不便;气候属于热带和亚热带季风气候,具有明显的雨季和旱季[5]。其网络环境正处于快速发展阶段,据统计,4G网络覆盖率已经达到70%[6]。
(2)使用群体。中老铁路作为老挝首条现代化铁路,承担着很大比例的老挝境内运输,旅客来自世界各国,主要为老挝、中国及周边国家,管理团队、运营团队由中国及老挝的铁路职工组成。
(3)业务模式。中老铁路跨境旅客列车采用“一车两制”模式,为始发担当的开行模式,全列分为国际车厢及境内车厢两种,国际车厢只产生跨境席位及票额,其席位管理、票务服务由始发国运营单位管理;境内车厢产生两国境内段席位及票额,在两国客票系统中各自发售。
综上所述,本文在票制、票务服务等多方面因地制宜,设计支持国际联运的票务服务方案,研发面向中老铁路跨境旅客运输的客票系统(简称:中老铁路客票系统),为中老铁路的跨境旅客运输提供强有力的技术支撑。
1 客票系统架构
遵循安全性、可扩展性及可维护性的设计原则,采用国产化技术,坚持自主创新,满足安全防护要求,基于成熟的技术模式和业务模式,结合跨境客运需求,设计中老铁路客票系统,其架构如图1所示。
1.1 “云平台+微服务”架构
中老铁路客票系统包含互联网专区和内网专区,均采用“云平台+微服务”架构,提供强大的计算能力和灵活的服务部署,还支持快速迭代和持续集成,使得本系统能够迅速响应市场变化和旅客需求。为保障互联网与内网之间的安全通信,在互联网与内网中间构建安全平台。该平台集成了多种安全机制,包括严格的访问控制策略和高效的数据加密技术。经过验证和授权后的请求才能在互联网与内网之间传输,有效防止未授权访问和潜在的网络攻击;数据加密技术确保传输过程中的数据安全,防止敏感信息的泄露。
1.2 互联网专区
互联网专区部署了一系列公共组件服务,包括集中配置、认证授权、验证码服务、缓存服务、消息队列和日志服务等。这些服务共同支撑了注册、登录、余票查询、售票、改签、退票等关键功能。互联网售票服务和联网代售点通过互联网专线安全接入互联网专区。将银行系统、短信运营商、邮件运营商等接入服务,支持线上和线下的电子支付功能及App通知服务。
1.3 内网专区
内网专区则承担着业务处理的核心角色,部署了票务服务、管理服务、检票服务等多种服务,以实现中心车站管理、窗口交易、互联网业务处理、验检票服务等功能。内网同样部署了集中配置、认证授权、验证码服务、缓存服务、消息队列、日志服务等公共组件服务,并增加了加密服务和二维码服务,以实现身份认证、数据加解密、二维码的生成与解析等关键功能。此外,内网还部署了数据共享服务,与调度系统、旅客服务系统、收入系统、统计系统等进行数据交换。这一部署策略确保了车站大屏显示、收入统计等关键功能能够及时准确地获取所需数据,从而为整个客票系统的高效运行提供了坚实的数据支持和保障。
2 技术方案
在设计并实现中老铁路客票系统时,面临着数据的高效管理、用户界面的便捷操作、支付方式的多样性与安全性等挑战。针对这些问题,设计采用了一系列解决方案和技术,以确保本系统高效、安全和稳定运行。
2.1 票制技术应用
综合老挝经济水平及东南亚经济发展现状,采用纸质客票和电子客票结合的方式,纸质客票直观易验证,电子客票具有提高效率、节约成本的优点。利用车票唯一识别码实现车票状态追踪,旅客使用电子客票或纸质客票均能享受全流程票务服务。内网区搭建的二维码生成服务利用软件加密与硬件加密的双重加密技术,将唯一识别码转化为车票二维码,集成中、老两国加解密技术,满足跨境列车互相验检票需求。
纸质客票票纸采用定制化热敏纸,具备良好的耐光性、耐热性、耐水性及防摩擦性,纸张厚不易损坏,适应老挝高温多雨的天气,且成本低、采购便利。票面关键信息以3国语言展示;遵循中老两国的统一标准,保障跨境列车服务更加顺畅。
2.2 适应跨境列车的数据管理
基础数据的设计和管理是确保中老铁路客票系统准确高效运行的关键,为此,建立了多维度的基础数据模型,实现了数据之间的关联和一致性。通过对车站、列车、停靠站等基础数据信息进行细致的规划和设计,客票系统能够高效地处理复杂的跨境运输数据,提供准确的信息服务。
在停靠站模块中,利用车站所在时区信息,自动换算停靠站当地的到站及发站时间,确保旅客和运营方都能获得准确的时间信息。票价管理模块则设计了一种包含中国段和老挝段两段票价的列车站间票价结构,业务人员定义两段票价后,自动计算总票价,同时在售票后在订单和存根数据中记录两段票价,为后续的统计清算提供了便利。在席位管理方面提供票额计划、席位共用、调度命令管理、票额调整等列车席位的有效组织和分级管理功能[7],支持对列车中不同类型的车厢进行席位计划制定、席位生成。设计了联动卡控机制,能够根据车厢类型智能卡控席位生成计划,防止业务人员错误地将国际车厢生成境内席位,从而确保了席位分配的准确性和合规性。
2.3 建立多种购票渠道
老挝车站离市区远,道路崎岖交通不便,建设互联网售票系统手机App“LCR Ticket”和联网代售点系统对于减少旅客出行成本、提高旅客出行体验有十分重要的作用。手机App的设计充分考虑旅客使用习惯,采用了跨平台移动开发框架,以实现一套代码在不同操作系统上的兼容运行,保障了App在不同平台上的用户体验一致性[8]。利用分布式缓存处理、数据同步机制、异步排队交易等技术[9-10],保障数据的准确性和完整性,有效避免了中老铁路客票系统过载,显著提高其响应速度和处理能力。支持对多家银行系统、短信运营商、邮件运营商等外部服务的安全访问,实现注册、登录、购票、改签、退票、电子支付、通知等功能,为旅客提供了便捷的服务。联网代售点设立在老挝首都万象和著名城市琅勃拉邦的繁华市区,与手机App、车站窗口渠道互为补充,为旅客提供售票、换取纸质车票等服务。
2.4 电子支付集成
通过构建统一的支付服务平台,中老铁路客票系统集成了包含支付宝、微信、BCEL OnePay、Mepom、VISA及银联的多种支付方式,其中,BCEL OnePay和Mepom为老挝本土常用的支付方式, 支付服务平台能够处理来自手机App及线下窗口的多种电子支付方式的支付请求,确保了支付流程的灵活性和可扩展性,为旅客提供多样化的电子支付服务。
2.5 多币种收费
老挝当地流通老币基普、人民币、美元、泰铢等多种现金币种,因此,设计多币种收款模式,便于旅客灵活选择。采用人民币作为计价币种,在跨境列车票价定义阶段,管理人员仅需要维护中国段和老挝段的人民币票价,客票系统自动计算总票价,并利用汇率数据换算成老挝基普、美元等币种的票款。这一过程确保了票价信息的准确性和实时性,同时,在余票查询和下单购票界面清晰展示,极大地方便了国际旅客的购票决策。在旅客完成下单后,中老铁路客票系统详细记录收费币种、金额及不同国家段的票价等关键信息,这些数据将为后续的财务处理和收入统计提供必要的支持。收入统计模块的设计考虑了多币种数据处理的需求,能够根据不同币种分别进行汇总统计,从而为运营方提供详尽的财务报告和数据分析。
2.6 多语言切换
多语言支持技术是确保中老铁路客票系统能够跨越语言障碍、服务于国际旅客的关键。为此,设计了一套包含静态数据和动态数据的多语言数据处理机制。建立铁路专用词库,准确翻译铁路专业词句,通过引入通用的语言识别码和唯一的词句编码,能够精确地识别和匹配相应的语言资源,实现高效的语言转换。管理系统、线下车站窗口及手机App均支持中文、老挝文、英文等3种语言切换,方便铁路职工进行业务数据的维护和查询,也方便国际旅客使用。
2.7 App下载及注册
为了满足不同国家和地区旅客的多样化需求,采用了先进的国际短信服务技术,以支持中国、老挝、泰国等国家的手机号注册功能。通过集成短信网关和运营商接口,实现了对不同国家手机号码格式和短信服务的兼容性处理,确保了短信验证码的准确发送和接收。除了手机号码注册方式,中老铁路客票系统还提供了邮箱注册方式,以适应不同用户的使用习惯和偏好。在后端设计了用户账户管理模块,能够处理来自不同注册方式的用户数据,确保账户信息的一致性和安全性。
为了进一步提升使用便利性,App在多个主流应用商店中发布上线,这种跨平台的应用发布策略,最大程度确保国际用户轻松搜索并下载手机App“LCR Ticket” 。
3 关键技术
3.1 互联网安全接入技术
客票系统核心服务与手机App、第三方支付系统、短信邮件系统、联网代售点系统均有访问调用需求,为保障客票系统安全接入,依托统一接入服务和零信任安全认证体系,设计互联网接入区及互联网专区,部署必要的网络设备、服务器设备和安全设备,实现安全隔离和访问控制。互联网接入体系架构如图2所示。
手机App、第三方支付系统及短信、邮件系统接入互联网专区主要依赖统一接入服务完成身份认证。互联网专区内建立多个物理网络结构,划分出多个安全区域,各安全区域之间采用必要的安全设备实现安全隔离和访问控制。App服务区建立统一接入服务、流量清洗服务,对App客户端发起的业务请求数据进行前置筛选和过滤,保障内部应用服务的安全性。
联网代售点安全接入依赖协同式零信任安全认证体系,基于身份和访问控制重构信任基础,每个用户、设备、业务访问都需要被认证、授权、加密,形成面向公共互联网传输通道的多层次、立体式安全保障体系,解决联网代售点互联网通道的安全协同问题。零信任体系由零信任客户端、零信任网关和零信任服务组成。零信任客户端主要完成用户认证、防病毒认证、零信任系统检查、网络环境检查、本地策略管理和终端状态上报;零信任网关负责安全通道通信和终端访问策略管理;零信任服务实现用户认证、设备认证、安全配置、访问策略下发、应用资源管理、网关管理、可信评估和网络资源管理等功能。联网代售点终端安装零信任客户端,当终端发起与零信任系统的认证及接入时,零信任服务完成终端的身份认证、访问策略控制等功能,建立代售点终端与零信任网关的安全通信通道。构建零信任认证授权机制,建立公共网络与互联网专区之间的安全管道,实现客票内网服务的安全访问。
3.2 集成多国电子支付的统一支付技术
中老铁路客票系统旅客群体构成复杂,为了迎合旅客群体的电子支付习惯,集成多国电子支付方式,建立统一支付模块,统一支付模块架构如图3所示。互联网专区搭建接入验证服务,包括准入系统、防火墙、入侵检测、访问策略、网络环境检测、安全配置校验等功能。统一支付模块包括支付网关和支付服务,支付网关负责进行进一步的数据验证,如用户验证、银行请求签名验证和请求IP验证;支付服务负责完成支付请求、回调请求、二维码请求的接口处理。统一支付模块实现对多家电子支付收单机构不同交易请求数据的统一验证与拆解,确保进入核心区请求的安全性、规范性和统一性,也确保本系统具备灵活的可扩展能力。
4 应用效果
2021年12月2日,中老铁路客票系统顺利上线,实现车站窗口车票发售、改签及退票等业务。两年多来,本系统持续升级优化,建设互联网售票系统、互联网代售点系统、站车无线交互平台,先后上线多币种收费、老挝本土收单机构接入、线下窗口电子支付、App增加注册方式等多种功能,逐步实现了售票和车站/列车客运服务全覆盖。
截至2024年4月13日,中老铁路跨境列车已运送来自87个国家和地区的跨境旅客18.3万余人次。近一年间沿线新增2个停靠车站,在重要节日期间加开跨境列车,车程从最初的10 h30 min缩短至9 h30 min。中老铁路不断提速增量,成为联通中国和老挝的重要纽带,有效推动两国人文交流和当地社会经济发展。
5 结束语
本文设计了面向中老铁路跨境旅客运输的客票系统。该系统的设计,从跨境业务和国际化需求着手,充分考虑跨境运输的特殊性,使其具有多种语言支持、多币种支付、多国电子支付等功能,以满足不同国家和地区旅客的需求。
本系统的成功应用,极大提升了中老铁路客运信息化水平,提高了中老铁路客运效率,为旅客提供了更优质的出行服务,也为中老铁路跨境旅客运输提供了有效的技术支撑。展望未来,随着人工智能、大数据、云计算等技术的发展,本系统仍有很大的提升空间,通过引入预测分析、自动化客户服务等技术,可进一步提升其智能化水平,为“一带一路”高质量发展作出更多贡献。
-
表 1 DeepSeek大模型私有化部署需求表
分类 模型名称 参数量[4] 量化 显存需求[13] 语言
大模型DeepSeek-V3 671 B 无 ~ 1543 GBDeepSeek-R1 671 B 无 ~ 1543 GBDeepSeek-R1 671 B 4 bit ~ 436 GB DeepSeek-R1 671 B 1.58 bit ~ 160 GB DeepSeek-R1-Distill-Llama-70B 70 B 无 ~ 181 GB DeepSeek-R1-Distill-Llama-70B 70 B 4 bit ~ 46 GB DeepSeek-R1-Distill-Qwen-32B 32 B 无 ~ 82 GB DeepSeek-R1-Distill-Qwen-32B 32 B 4 bit ~ 21 GB DeepSeek-R1-Distill-Qwen-14B 14 B 无 ~36 GB DeepSeek-R1-Distill-Qwen-14B 14 B 4 bit ~ 9 GB DeepSeek-R1-Distill-Llama-8B 8 B 无 ~ 21 GB DeepSeek-R1-Distill-Llama-8B 8 B 4 bit ~ 5 GB DeepSeek-R1-Distill-Qwen-7B 7 B 无 ~ 18 GB DeepSeek-R1-Distill-Qwen-7B 7 B 4 bit ~ 4.5 GB DeepSeek-R1-Distill-Qwen-1.5B 1.5 B 无 ~ 3.9 GB DeepSeek-R1-Distill-Qwen-1.5B 1.5 B 4 bit ~ 1 GB 多模态
大模型DeepSeek-Janus-Pro-7B 7 B 无 ~ 24 GB DeepSeek-Janus-Pro-1B 1.5 B 无 ~ 8 GB  下载: 导出CSV
下载: 导出CSV
-
[1] Zhao W X, Zhou K, Li J Y, et al. A survey of large language models[DB/OL]. arXiv, 2023[2025-03-02]. http://arxiv.org/abs/2303.18223.
[2] OpenAI. Introducing ChatGPT[EB/OL]. (2024-03-13)[2025-03-02]. https://openai.com/index/chatgpt/.
[3] DeepSeek-AI, Liu A X, Feng B, et al. DeepSeek-V3 technical report[DB/OL]. arXiv, 2024[2025-03-02]. http://arxiv.org/abs/2412.19437.
[4] DeepSeek-AI, Guo D Y, Yang D J, et al. DeepSeek-R1: incentivizing reasoning capability in llms via reinforcement learning[DB/OL]. arXiv, 2025[2025-03-02]. http://arxiv.org/abs/2501.12948.
[5] DeepSeek(人工智能企业)[EB/OL]. [2025-03-02]. https://baike.baidu.com/item/DeepSeek/65258669. [6] Chen X K, Wu Z Y, Liu X C, et al. Janus-pro: unified multimodal understanding and generation with data and model scaling[DB/OL]. arXiv, 2025[2025-03-02]. http://arxiv.org/abs/2501.17811.
[7] Wei J, Wang X Z, Schuurmans D, et al. Chain-of-thought prompting elicits reasoning in large language models[C]//Proceedings of the 36th International Conference on Neural Information Processing Systems, 28 November-9 December, 2022, New Orleans. Red Hook, NY, USA: Curran Associates Inc. , 2022: 1800.
[8] Dai D M, Deng C Q, Zhao C G, et al. DeepSeekMoE: towards ultimate expert specialization in mixture-of-experts language models[DB/OL]. arXiv, 2024[2025-03-02]. http://arxiv.org/abs/2401.06066.
[9] Shao Z H, Wang P Y, Zhu Q H, et al. DeepSeekMath: pushing the limits of mathematical reasoning in open language models[EB/OL]. arXiv, 2024[2025-03-02]. http://arxiv.org/abs/2402.03300.
[10] 王同军. 智能高速铁路概论[M]. 北京:高等教育出版社,2023. [11] 王同军. 中国智能高速铁路2.0的内涵特征、体系架构与实施路径[J]. 铁路计算机应用,2022,31(7):1-9. DOI: 10.3969/j.issn.1005-8451.2022.07.01 [12] 王同军,王万齐,李 平,等. 模数一体化平台赋能下的智能高铁2.0关键技术展望[J]. 中国铁路,2024(7):1-6. [13] Hannah F. DeepSeek System Requirements Guide For Mac OS (V3, R1, All Variants)[EB/OL]. [2025-03-02]. https://apxml.com/posts/deepseek-system-requirements-mac-os-guide.
[14] 国家互联网信息办公室,中华人民共和国国家发展和改革委员会,中华人民共和国教育部,等. 生成式人工智能服务管理暂行办法[EB/OL]. [2025-03-02]. https://www.cac.gov.cn/2023-07/13/c_1690898327029107.htm.



计量
- 文章访问数: 107
- HTML全文浏览量: 46
- PDF下载量: 62
