

Remote monitoring system and its key technologies for heavy haulrailway locomotive
-
摘要:
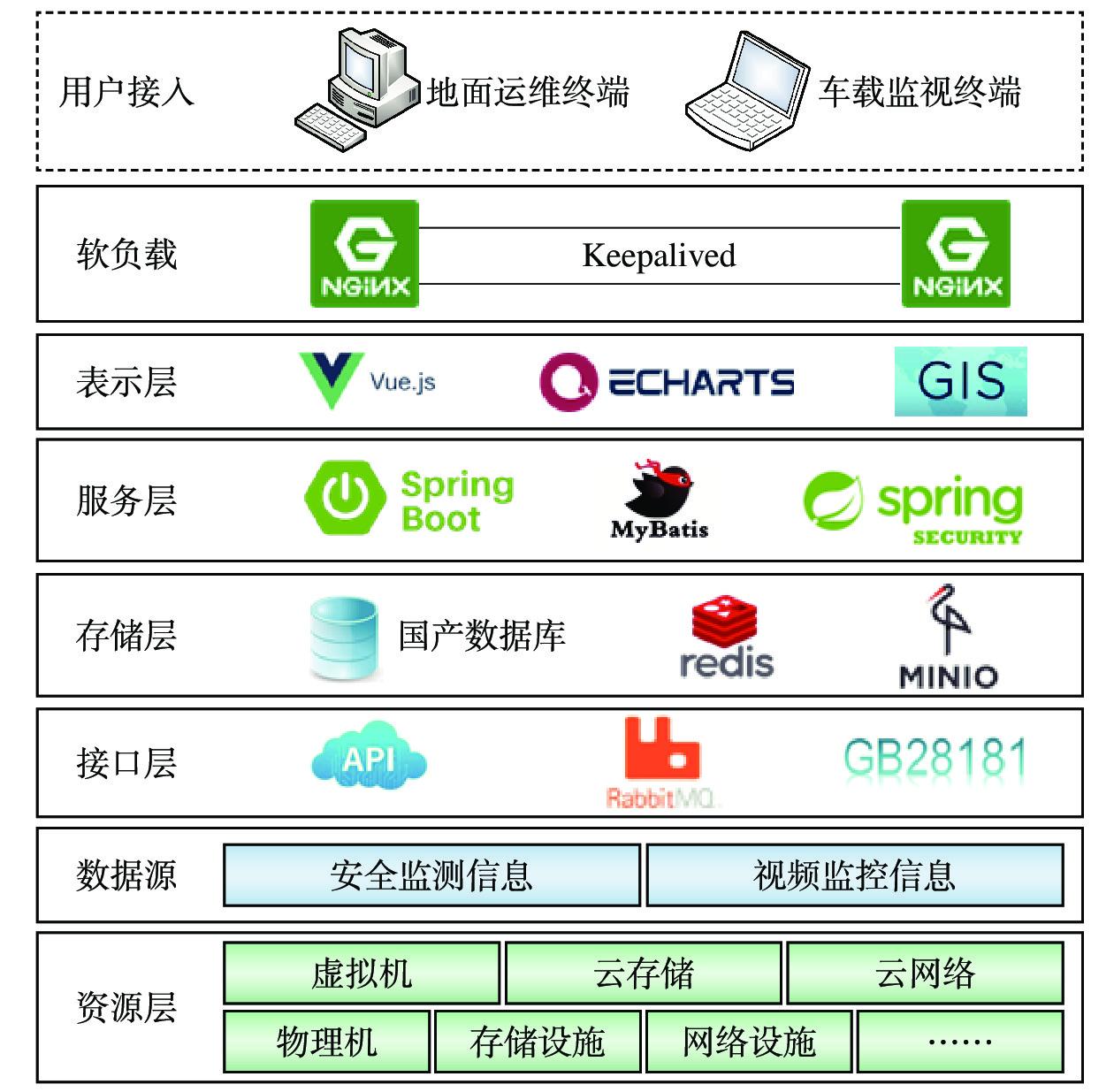
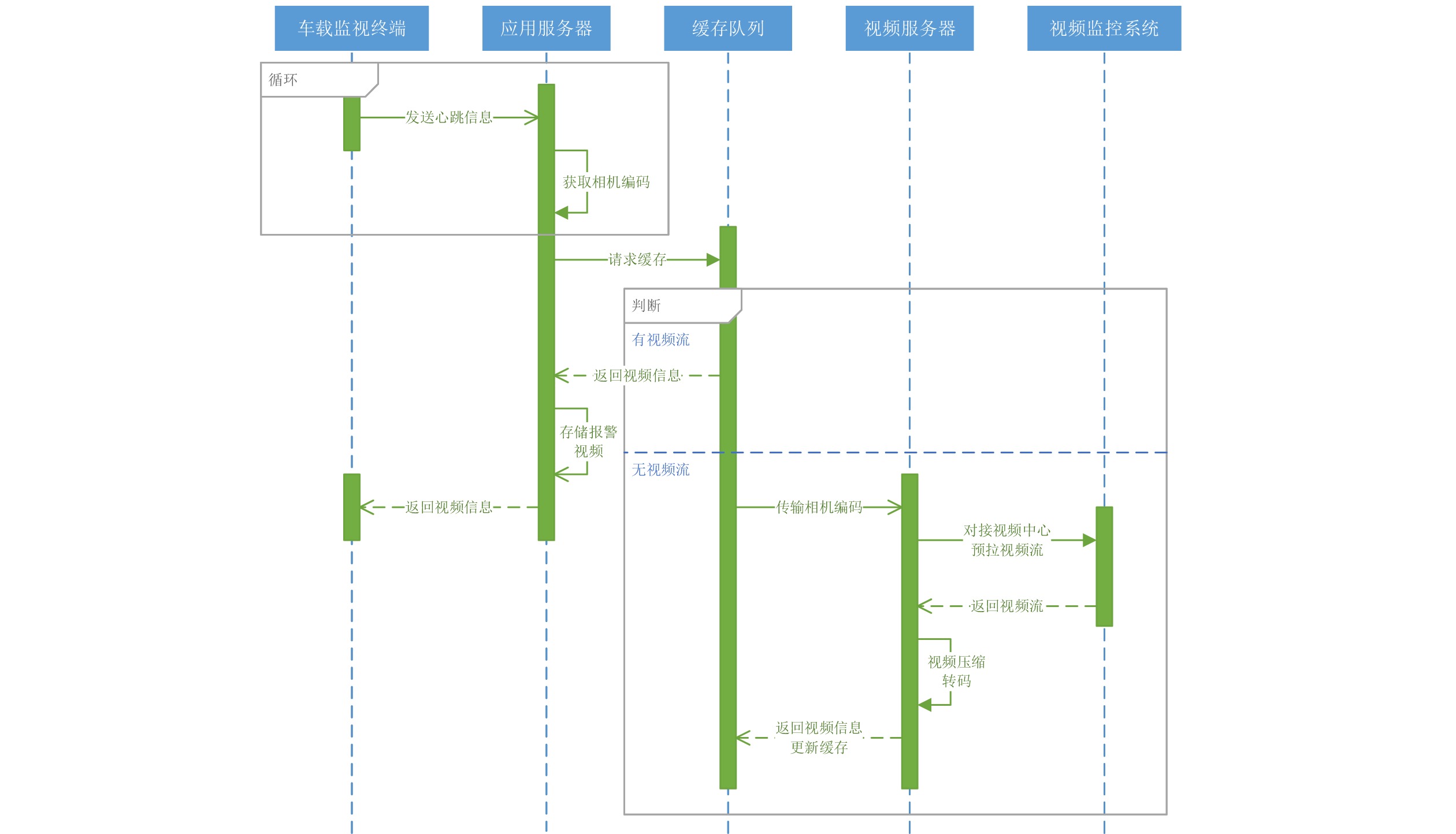
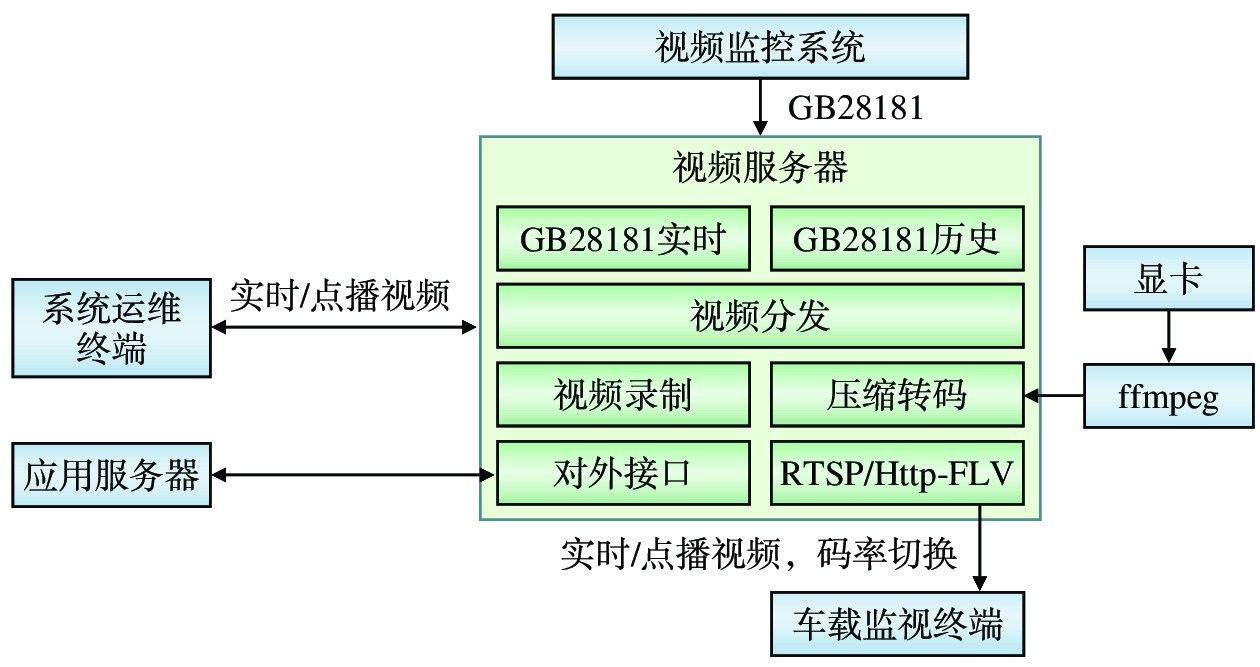
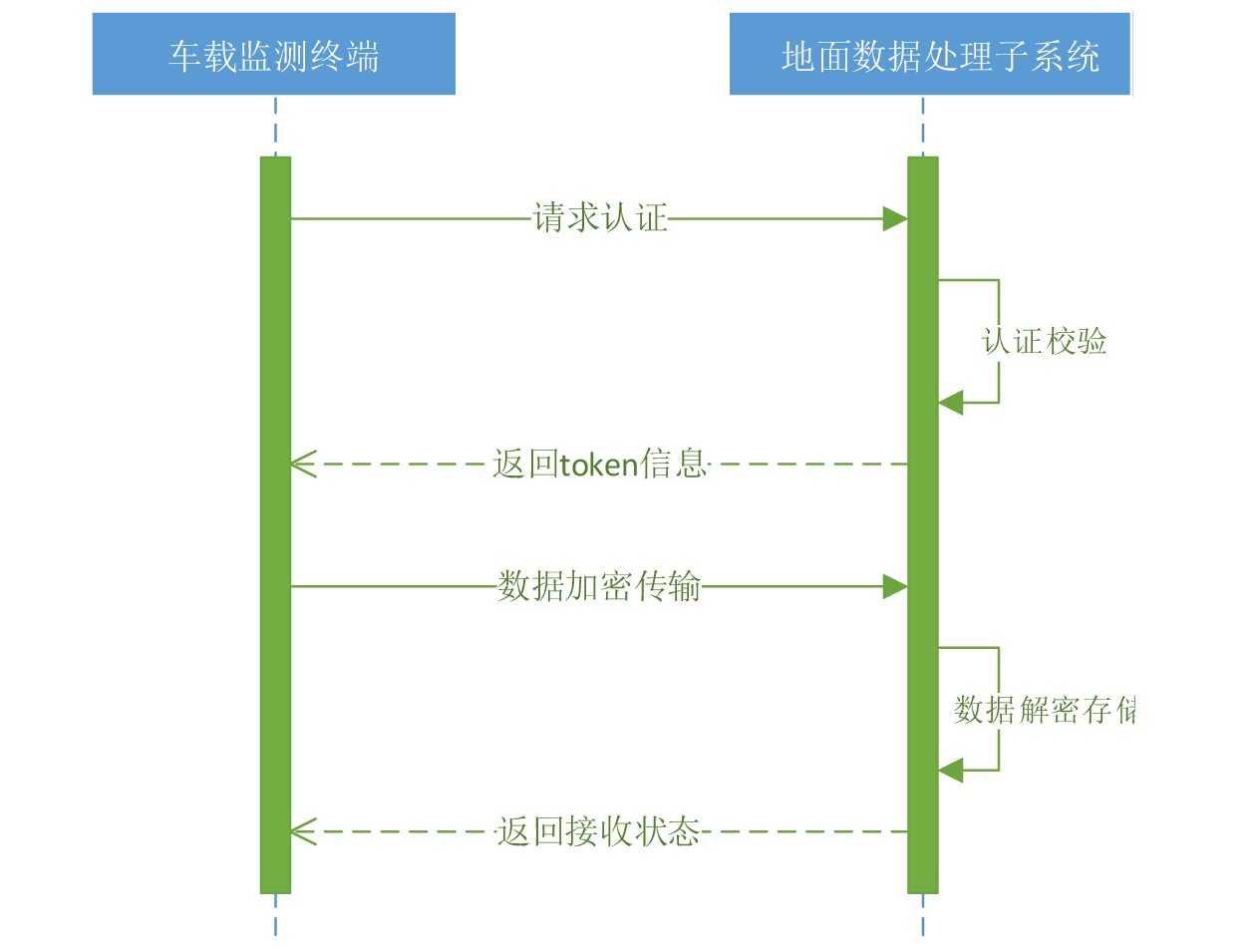
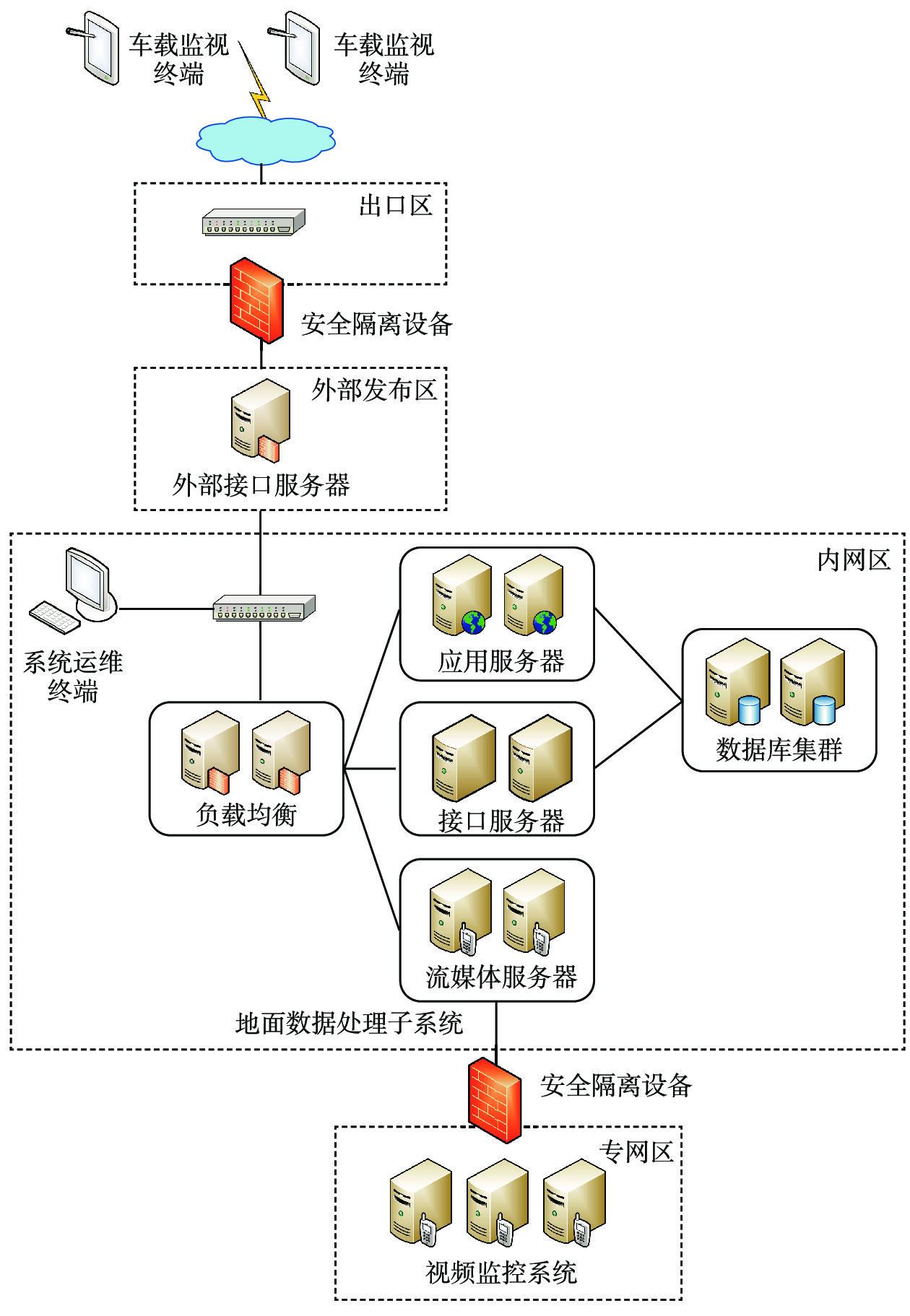
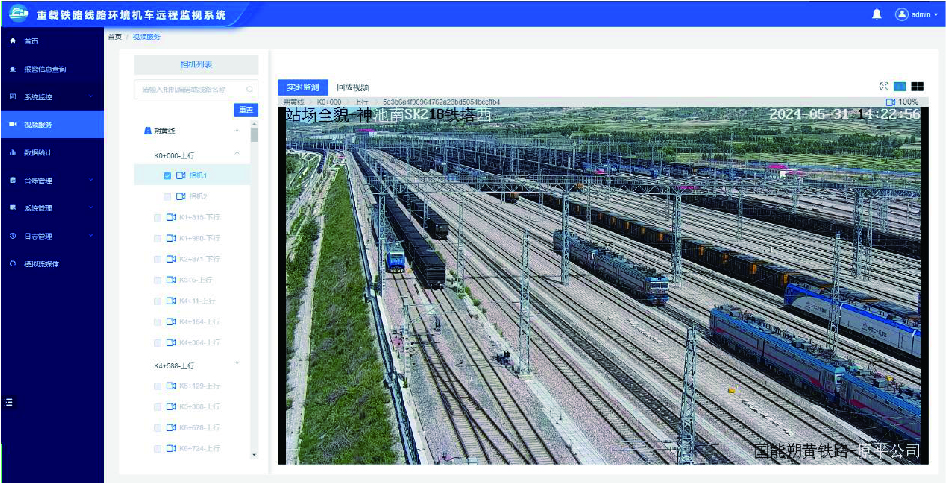
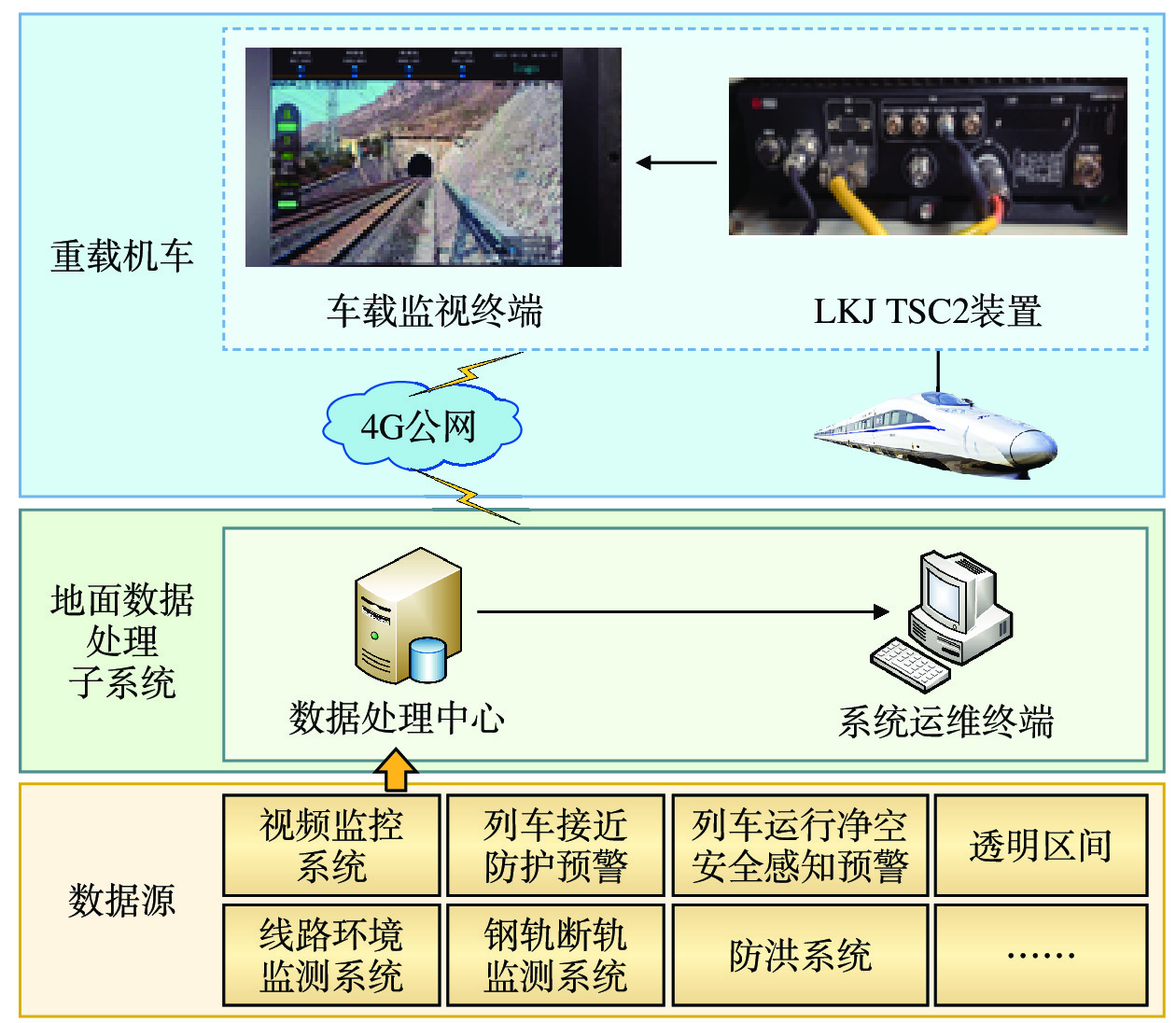
我国重载铁路多为典型山区铁路,自然灾害、地质灾害风险较大,重载列车运行安全风险随之增加。针对重载列车制动距离长、司机目视距离有限、列车运行前方发生险情时无法提前处置的难题,研究重载铁路机车远程监视系统,以及关联匹配、视频接入与处理、监测信息接入等关键技术,并在朔黄(朔州—黄骅)铁路开展示范应用。应用情况表明,该系统可为机车司机提供目视距离之外的视频监控和险情预警,辅助司机提前发现和处置险情,保障重载铁路列车运行安全。
Abstract:China's heavy haul railways are mostly typical mountainous railways, with high risks of natural and geological disasters, which increases the safety risks of heavy haul train operation. In response to the challenges of long braking distance for heavy haul trains, limited visual distance for drivers, and inability to handle in advance when a dangerous situation occurred in front of the train during operation, this paper studied the remote monitoring system for heavy haul railway locomotive, as well as key technologies such as correlation matching, video access and processing, and monitoring information access. The system was demonstrated and applied on the Shuozhou-Huanghua railway. The application situation shows that the system can provide video monitoring and danger warning for locomotive drivers beyond visual distance, assist drivers in detecting and handling danger in advance, and ensure the safe operation of heavy haul railway trains.
-
-
[1] 宋宗莹,边利平,谷 牧. 智慧重载铁路系统体系框架研究[J]. 铁道建筑,2022,62(1):4-10. [2] 曹 键. “朔黄模式”对瓦日、浩吉铁路发展的启示[J]. 铁道经济研究,2022(2):20-23. [3] 丁茂廷. 朔黄铁路重载运输技术发展策略研究[J]. 能源科技,2022,20(6):3-8. [4] 陈建译. 基于5G的高铁列车超视距行车辅助预警系统[J]. 铁道通信信号,2022,58(2):49-55. [5] 宁和平. 高速列车司机超视距监控预警系统应用研究[J]. 中国铁路,2023(10):122-127. [6] 赵 颖,罗 浩,柳青红,等. 列车超视距信息推送策略与关联算法研究[J]. 铁道运输与经济,2023,45(10):127-132. [7] 罗 浩,赵 颖,关则彬. 高速铁路列车超视距地面系统设计与应用[J]. 铁路计算机应用,2023,32(7):50-54. [8] 杜艳美,黄晓芳. 面向企业级Web应用的前后端分离开发模式及实践[J]. 西南科技大学学报,2018,33(2):83-87. -
期刊类型引用(5)
1. 景辉,戴琳琳,候亚伟,朱宇豪,随玉腾. 基于光照自适应调节和模糊分类的人脸图像质量提升算法研究. 铁路计算机应用. 2023(02): 1-6 .  本站查看
本站查看
2. 吕占民,李士达,戴琳琳,宋春晓,董兴芝. 基于AR智能眼镜的免打扰列车验票应用研究. 铁路计算机应用. 2023(05): 64-67 . 本站查看
3. 单杏花,张志强,宁斐,李士达,戴琳琳. 中国铁路电子客票关键技术应用与系统实现. 中国铁道科学. 2021(05): 162-173 . 百度学术
4. 赵耀. 多技术融合的大流量智能测温系统设计与实现. 铁路计算机应用. 2021(09): 31-34 . 本站查看
5. 周敏. 多技术融合的综合交通枢纽智能停车系统. 铁路计算机应用. 2021(09): 27-30 . 本站查看
其他类型引用(4)
 下载:
下载:
计量
- 文章访问数: 30
- HTML全文浏览量: 13
- PDF下载量: 15
- 被引次数: 9
