

Research on general-purpose automatic position rectification equipment based on LKJ operation data for railway infrastructure inspection cars
-
摘要:
中国铁路成都局集团有限公司(简称:成都局)山区铁路隧道多、枢纽线路复杂,基础设施检测车定位精准度不高,全球定位系统(GPS,Global Positioning System)信号无法全程提供里程校正,人工校正和换线操作繁琐费力。文章提出基于列车运行监控记录装置(LKJ)运行数据的铁路基础设施检测车通用定位自动校正设备的设计,由安装在机车上的前端车载装置、安装在检测车上的 LKJ 运行数据接收装置和定位数据综合处理软件组成;能够实时获取LKJ运行数据,通过无线通信传输至检测车,自动完成线路转换和里程校正,为检测车提供较为精准的定位校正信息。该设备适用于成都局配属的各专业基础设施检测车,安装简单快捷,与LKJ装置的接口具备完善的电气隔离。目前,该设备已在成都局电务检测车和接触网检测车上开展初步动态测试,基本达到设计要求,提升了基础设施检测车的智能化程度,有助于提高检测作业质量和效率。
-
关键词:
- 基础设施检测车 /
- 列车运行监控记录装置(LKJ) /
- 精准定位 /
- 自动里程校正 /
- 自动线路转换
Abstract:China Railway Chengdu Bureau Group Co., Ltd. (referred to as Chengdu Bureau) has many railway tunnels in mountainous areas and complex lines within the hubs. The infrastructure inspection cars have some common problems such as low positioning accuracy, inability to provide effective mileage rectification with GPS signals throughout the whole inspection process, tedious and laborious operations of manual mileage rectification and line changing. The article proposes a design of a general-purpose automatic position rectification equipment for railway infrastructure inspection cars based on ocomotive LKJ operation data. The equipment consists of a front-end onboard device installed on the locomotive, an LKJ operation data receiving device installed on the inspection car, and a suite of comprehensive positioning data processing software. The equipment can obtain real-time operation data from the locomotive 's LKJ equipment, transmit it to the inspection car via wireless communication, complete line changing and mileage correction automatically and provide precise position rectification data for the inspection car. This equipment is suitable for various specialty infrastructure inspection cars assigned by Chengdu Bureau, and easy and fast to install. At present, the equipment has undergone preliminary dynamic testing on one signal and comminications inspection car and one OCS inspection car, basically meeting the design requirements, improving the intelligence level of infrastructure inspection cars, and helping to improve the quality and efficiency of inspection operations.
-
精准定位是铁路基础设施检测车的一项关键技术,是保证检测结果有效性的基本前提。中国铁路成都局集团有限公司(简称:成都局)普速检测车主要用于工务、电务和供电专业基础设施检测,包括轨道几何参数检测、信号设备检测、通信系统检测、接触网几何参数检测、接触网悬挂状态检测。检测车的定位技术以线路基础数据库为基础,利用速度编码器采集的速度信息,累积计算检测车当前运行位置的里程数据,并使用全球定位系统(GPS,Global Positioning System)进行里程校核,修正累积计算里程数据的定位误差。由于成都局管内线路大多地处山区,隧道占比大,当检测车在隧道内或山谷内运行时,不能可靠接收GPS信号,无法利用GPS信号来校正里程;此时,需由检测人员根据实际情况来校正里程,工作强度大、精准度低。此外,当线路改变时,需由人工确认线路名称,操作检测系统来进行换线,工作量大,且存在操作延迟,会造成换线区段的无效检测。
为提升检测车在运行过程中的定位准确性和精度,国内相关研究人员进行了深入研究。文献[1]提出一种采用图像识别技术的定位方法,使用开源的跨平台计算机视觉和机器学习软件库OpenCV,通过接触网支柱号牌的图像自动识别,用接触网杆号来确定检测车的运行位置。文献[2]采用工业相机获取接触网支柱图片,通过图像识别接触网支柱号牌,实现接触网无人巡检车的定位;文献[3]设计了一种基于超宽带室内定位技术(UWB,Ultra Wide Band)的测距与定位系统,在地铁隧道和轨道巡检车上分别安装UWB基站和标签,通过计算标签与基站的距离,实现轨道巡检车相对于基站的定位;文献[4]采用多功能车辆总线(MVB,Multifunction Vehicle Bus)、GPS、无线射频识别(RFID,Radio Frequency Identification)、锚段校正等多种方式相结合的综合定位方法,有效提升列车的定位精度;文献[5]通过无线传输,将TAX装置中存储的定位数据发送给电务检测车,降低检测人员的工作量;文献[6]提出北斗导航定位系统与图像处理相结合的自动定位方法,满足无人检测车自动定位的精度要求;文献[7]提出在检测车安装感应线圈,通过感性线圈识别轨道电路绝缘节的定位校正技术。
由于成都局接触网支柱号牌安装高度不统一,不少接触网支柱号牌无法被普速检测车采集,且部分普速线路还存在接触网支柱号牌缺失的现象,且采集和处理接触网支柱号牌图像数据存在较大的时间延迟,使用接触网支柱号牌图像识别技术的定位方法存在定位数据不完整、延迟较大的问题。而RFID只能给出点式定位信息,且运维成本高。锚段基础数据不准确,检测系统不能准确识别锚段,使用锚段关节定位的方法存在定位误差大、可靠性低的问题。通过TAX装置数据校正定位时,存在线路转换不精准,经常延迟一个区间才能完成线路转换的问题。概而言之,采用上述定位方法均存在一定的局限性。
考虑到目前成都局检测车由机车牵引,机车上的列车运行监控记录装置(LKJ)运行数据完整且较为精准。可通过获取LKJ运行数据,利用其中的线路、行别、里程等信息,实现各类基础设检测车的精准定位。本文研究一种以机车LKJ 运行数据为基础,具备较高可靠性和定位精度、安装操作简便的铁路基础设施检测车通用定位自动校正设备(简称:通用定位校正设备),能够自动完成换线和里程校正,提高各专业检测车定位的精准度,减轻检测人员工作强度。
1 机车LKJ运行数据及既有检测车定位方式
1.1 机车LKJ 运行数据简介
LKJ防止列车冒进信号、运行超速事故和辅助机车司机提高操纵能力的重要行车设备,具有机车运行数据实时记录功能,能够记录日期、时间、里程坐标、机车条件变化、运行状态、按键、检修人员/司机输入、系统自检、揭示控制、点式信息等内容;记录的数据能够通过转储器、专用IC卡或无线传输方式转储到地面微机系统中,由相应软件进行统计、分析及打印。与检测定位相关的 LKJ 运行数据接口信息包括车次号、交路号、车站号、线路号、公里标(里程)、线路标志(行别)、信号机种类、信号机编号等,如表1所示。
表 1 LKJ运行数据接口信息表序号 内容 偏移 字节数 内容说明 1 包头 0 2 0x55 0x01 2 包号 2 1 0-FF循环 3 车次种类标识 3 4 4 车次号 7 3 5 交路号 10 1 6 车站号 11 2 7 信号机种类 13 1 8 信号机编号 14 2 9 公里标 16 3 10 线路号 19 2 工务实际线路号 11 线路标志 21 1 D6-D4:预留;D1:1-上行;D0:1-下行 12 时速 22 3 13 预留 25 6 固定填0 14 校验位 31 1 为序号2到序号13的所有字节累加和的
二进制补码合计 32 成都局配属的机车上安装的LKJ装置主要为LKJ-2000型,除了SS3B、HXD1、HXD1C、HXD3C等型号机车外,其他机车上安装的LKJ装置没有可用的总线扩展接口,无法直接加装通用定位校正设备。
1.2 既有检测车定位方式及存在问题
1.2.1 既有检测车简介
成都局配属的各专业基础设施检测车共计16辆;其中,轨道检测车4辆,电务检测车3辆,接触网检测车7辆,综合巡检车2辆。轨道检测车、电务检测车、接触网检测车分别负责工务线路、信号设备与通信系统以及接触网等基础设施的检测,综合检测车可检测工务、电务和供电专业基础设施的状态。各专业检测系统的检测项目和定位标识如表2所示[8]。
表 2 各专业检测车的检测系统、检测项目和定位标识专业 检测系统 检测项目 定位标识 工务 轨道检测系统 轨距、轨向、高低、水平、
三角坑、轨距变化率等轨道
几何不平顺参数线路+行别+公里标 电务 信号检测系统 轨道电路、应答器、补偿电容、牵引回流等参数 线路+行别+公里标+
区间+轨道电路区段通信检测系统 GSM -R服务质量、GSM -R场强覆盖、电磁环境、电路域数据通信质量等参数 线路+行别+公里标 供电 弓网检测系统 接触线高度、拉出值、高差等接触网几何参数,以及弓网接触力、硬点等弓网动态作用
参数线路+行别+公里标+
区间+桥隧名+接触网
支柱号接触网悬挂状
态检测系统接触网悬挂松、脱、卡、磨、断等缺陷 同上 1.2.2 既有检测车的定位方式
各专业检测车采用不同的检测系统,检测项目各有不同,原有检测系统的定位原理基本一致,均采用由人工设置检测车运行线路、行别和起始里程,根据速度编码器和车轮数据,累积计算检测车当前运行位置的里程,辅以GPS提供的经纬度数据来校正里程,以消除累积计算里程的误差;当检测车运行在没有GPS信号的区段时,则由人工来完成里程校正。另外,当列车跨线运行时,由检测人员手工操作检测系统,来完成线路切换。
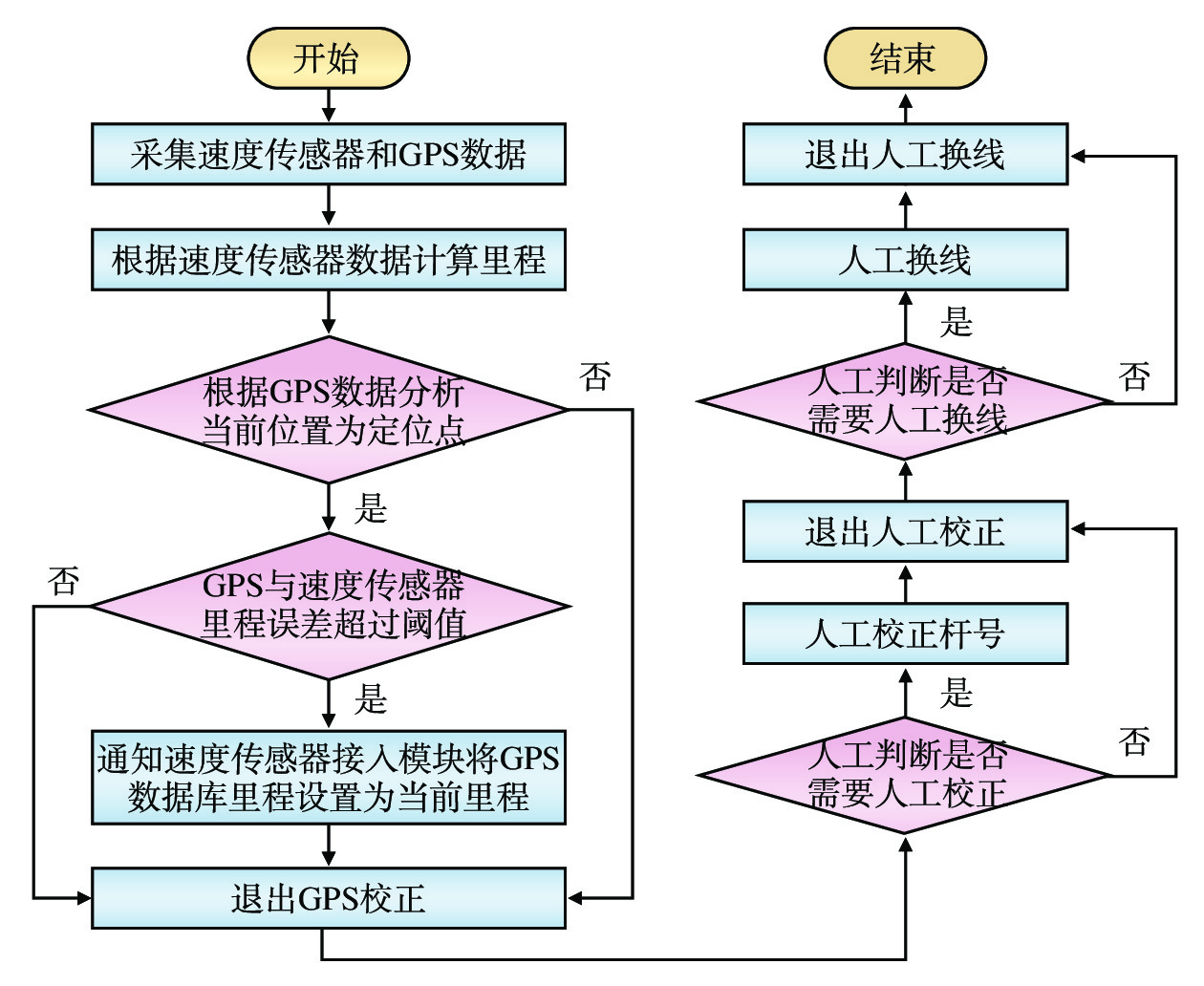
在检测车上线运行的过程中,当检测车检测系统启动后,通过基于速度编码器的里程累积计算、GPS校正和人工校正、人工换线操作,来确定检测车当前的位置,具体流程如图1所示[4]。
(1)基于速度编码器的里程累积计算:检测车的车轮上安装有速度编码器,通过获取速度编码器的脉冲信号数量,结合车轮每圈脉冲数及车轮周长计算行驶距离,根据起始位置的里程和行驶距离,累积计算当前位置的公里标。
(2) GPS 校正里程:检测车检测系统预先由人工打点标记线路的GPS经纬度数据,建立线路定位点GPS数据库,检测车运行的过程中,计算GPS信号中的经纬度数据与线路上最近的标记点之间的直线距离,若直线距离小于GPS定位误差时,确认该标记点为检测车当前的GPS定位点,当检测车当前的GPS定位点里程与速度编码器累积里程误差超过阈值时,检测系统自动进行里程校正。
(3)人工校正里程:无论何时,检测车检测系统都认为人工校正是最正确的;一旦收到人工校正命令,检测系统将立刻根据检车人员输入的位置校正数据来修改当前位置的里程。各专业人工校正采用不同的方式,工务专业和电务通信专业采用人工读取公里标、半公里标、百里标等线路标志来进行里程校正,电务信号专业采用人工读取信号机铭牌的方式来进行里程校正,供电专业采用人工读取接触网支柱号牌的方式来进行里程校正。
(4)人工换线操作:在列车运行过程中,当运行线路发生改变时,需由检测人员人工确认切换线路名称,并操作检测系统来完成换线。
1.2.3 既有检测车定位存在问题
目前,检测车定位技术以线路基础数据库为基础,运用速度编码器获得检测车的里程数据,使用GPS进行里程校正,主要问题包括:
(1)基于速度编码器累积计算的的里程数据存在一定误差:由于车轮磨损导致车轮直径数据误差较大,车轮存在空转和滑行,影响使用速度编码器计算的里程精度。
(2)GPS校正里程的有效性难以保证:成都局管内线路大多地处山区,隧道占比几乎达到线路总长的40%,检测车在隧道内不能可靠接收GPS信号,难以保证GPS校正里程的有效性。
(3)人工校对里程数据精度差且工作强度大:在检测过程中,由于运用速度编码器和GPS定位误差大,检测人员需根据实际情况校正里程,精准度低,工作强度大,造成检测结果定位信息不准确,导致现场复核缺陷找不到缺陷位置。
(4)人工转换线路存在时间延误:人工换线操作往往存在一定的时间延误,若遇到检测人员不能准确识别线路切换点,还会发生检测线路转换不及时的情况,导致换线区段定位信息错误,从而造成无效检测。
2 通用定位校正设备设计
2.1 设计要求
(1)LKJ运行数据实时获取与传输:能够从具备总线扩展接口的机车(例如SS3B、HXD1、HXD1C、HXD3C等型号)LKJ装置中实时自动读取、解析 LKJ运行数据记录,并将 LKJ运行数据传输至检测车。
(2)里程自动校正:利用实时获取的LKJ运行数据,自动校正检测车当前的里程数据。
(3)线路自动转换:能自动判断线路切换点,自动完成线路切换,据此生成检测车定位数据,即线路+行别+里程。
(4)接口电气隔离:与LKJ的接口具备完善的电气隔离,不影响LKJ的正常运行。
(5)适用性:适用于成都局现有的各种类型检测车,如电务检测车、接触网检测车。
(6)传输距离:应满足检测车在检测列尾部检测时有效接收LKJ数据,不小于240 m。
(7)供电:采用电池供电,最大续航工作时间应满足单次检测的需要,暂定≧24 h,电池应符合CRCC认证标准。
(8)安装要求:设备安装简单快捷,现场安装作业时间≤15 min。
2.2 总体结构
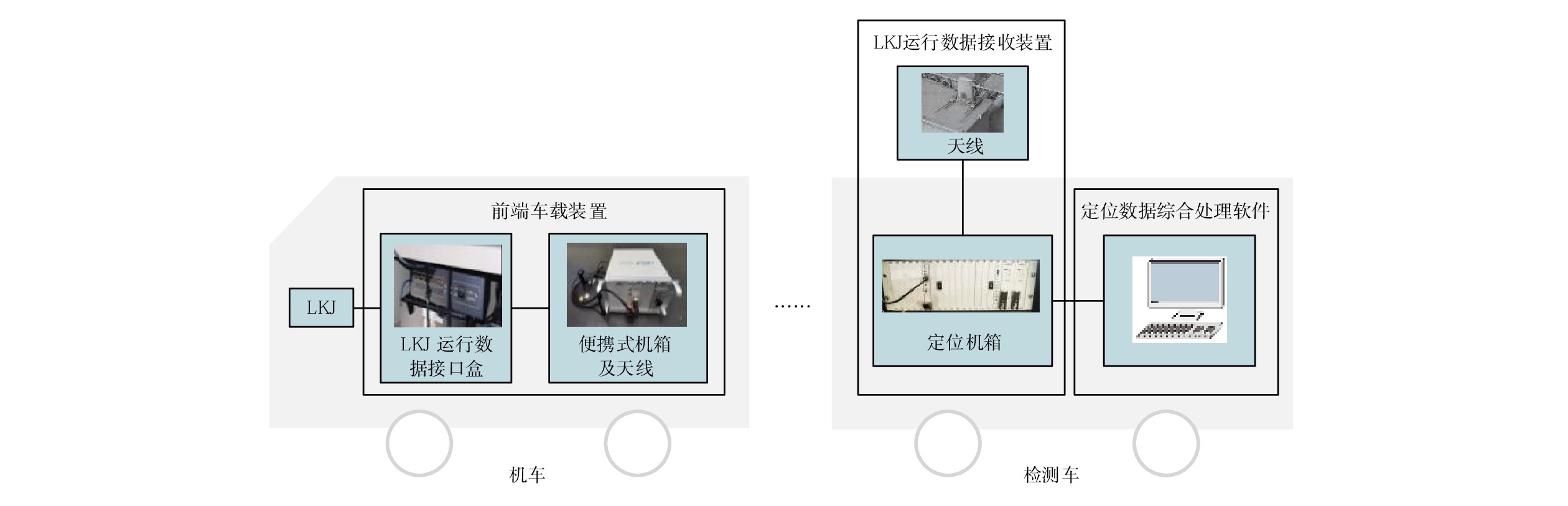
通用定位校正设备通过总线扩展接口,从机车的 LKJ装置读取运行数据,获取线路名、行别、里程等信息,结合检测车检测系统的线路数据字典,实现检测车精准定位及线路自动转换。该设备由安装在机车的前端车载装置及安装在检测车上的 LKJ 运行数据接收装置和定位数据综合处理软件3部分组成,总体结构如图2所示。
对于综合巡检车,可简化设备配置,前端车载装置和LKJ 运行数据接收装置均无需加装天线来传输数据,此时两者可通过串口连接线缆传输LKJ运行数据。
2.3 前端车载装置
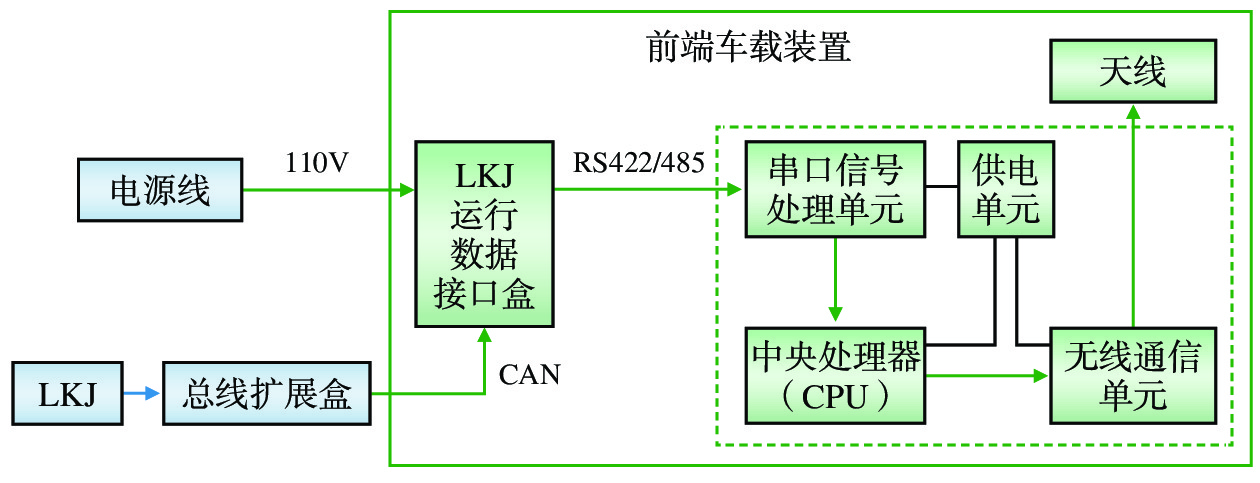
前端车载装置主要由LKJ运行数据接口盒、串口信号处理单元、中央处理器(CPU)、无线通信单元、天线、供电单元组成,LKJ运行数据接口盒采用110 V/50 Hz 电源供电,通过总线扩展盒接收LKJ运行数据,并通过无线通信单元和天线将数据发送给检测车上的LKJ运行数据接收装置;其结构如图3所示。
(1)LKJ数据接口盒:采用双机冗余设计,当其中一套出现异常时,可通过A/B机切换开关进行切换,实现 LKJ装置与前端车载装置之间的双向数据通信,且具备接口电气隔离和数据转换功能。
(2)串口信号处理单元:接收来自LKJ运行数据接口盒的串口信号,转换为TTL电平后输入给CPU。
(3)CPU:采用ARM-CortexM3系列CPU或者CPLD,接收并解析LKJ运行数据。
(4)无线通信单元:选用成熟的免许可频段设备,峰值功耗500 mW~1 W。
(5)天线:采用吸盘式天线。
(6)供电单元:给便携式机箱供电;采用 7.4 V锂电池,具有 CRCC 认证的成熟产品,变压电路主芯片转化效率应大于 85 %。
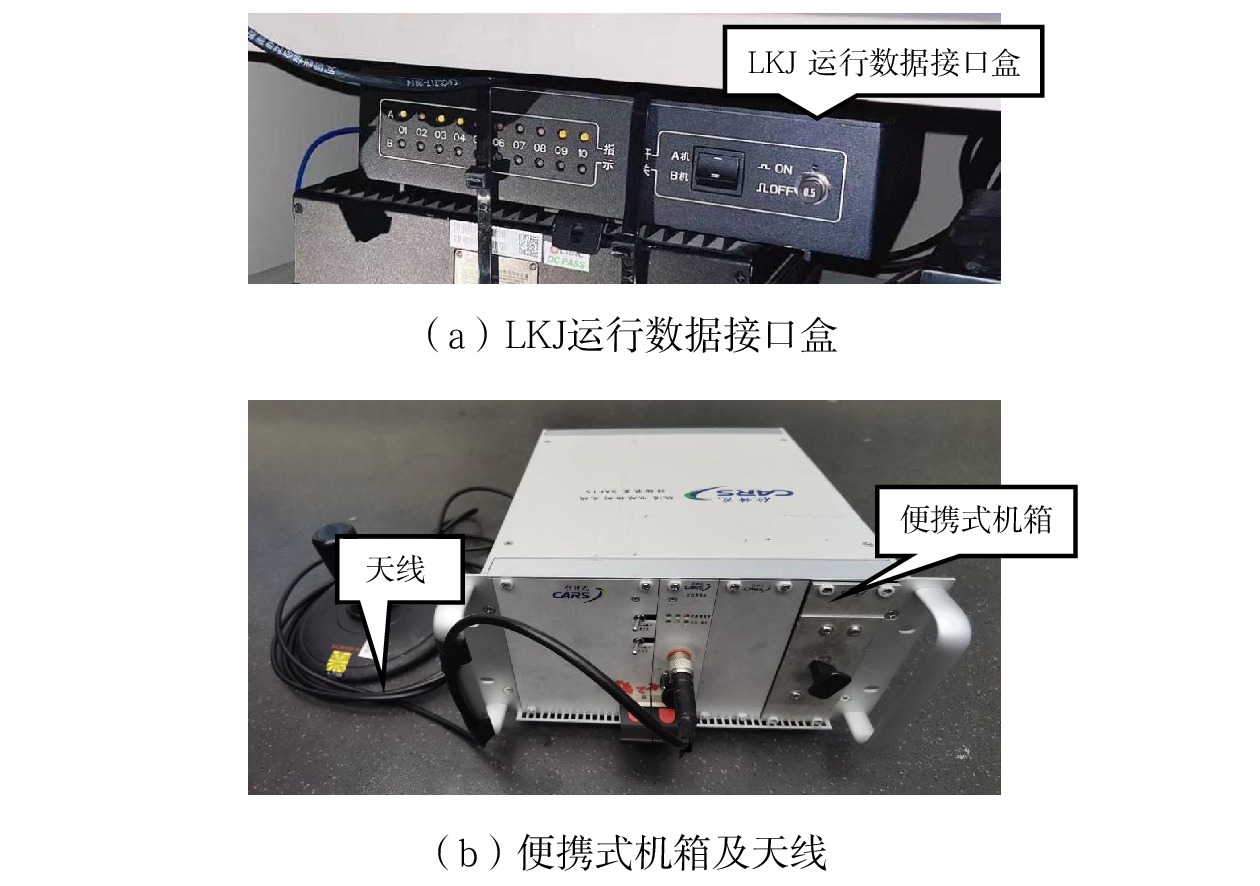
前端车载装置作为独立设备工作,除LKJ运行数据接口盒和天线外,串口信号处理单元、CPU、无线通信单元和供电单元都封装在便携式机箱。LKJ运行数据接口盒安装在机车机械间的第三方设备柜内的机架上,如图4(a)所示;天线和便携式机箱需要临时安装在机车机械间,天线吸附在第三方设备柜外侧面,便携式机箱放置在地面,如图4(b)所示。
2.4 LKJ 运行数据接收装置
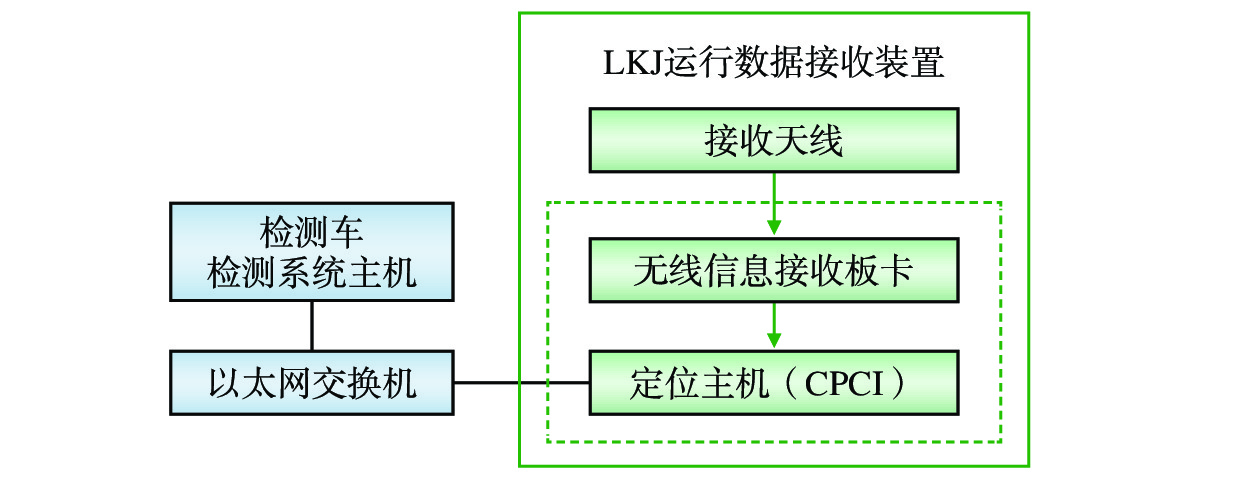
LKJ运行数据接收装置主要由接收天线、无线信息接收板卡和定位主机(CPCI)组成,采用220 V/50 Hz电源供电,利用检测车既有的车顶天线(450 M 频段或者宽频天线)接收前端车载装置发送的LKJ运行数据,其结构如图5所示。
(1)接收天线:采用鱼鳍天线,用于接收前端车载装置发送的无线信号。
(2)无线信息接收板卡:用于接收来至前端车载装置发送的LKJ运行数据。
(3)定位主机:采用成熟的 CPCI 结构的嵌入式计算机,运行 Win7/10 操作系统,通过以太网交换机与检测车检测系统主机相连接;完成LKJ运行数据接收、数据融合处理等功能。
接收天线安装在车顶,如图6(a)所示;无线信息接收板卡和定位主机封装在同一个定位机箱内,该定位机箱安装在检测车检测系统主机柜的机架内,如图6(b)所示。
2.5 定位数据综合处理软件
定位数据综合处理软件安装在检测车检测系统主机上,由基础数据录入与参数设置、基础数据管理、线路自动转换与里程自动校正、定位校正信息接口4个模块组成。
(1)基础数据录入与参数设置模块:完成基础数据(如线路数据字典、接触网支柱数据字典)的录入;完成相关参数的设置,如机车与检测车的距离、里程校正阈值等。
(2)基础数据管理模块:建立基础数据库,存储基础数据和配置参数,提供数据快速访问接口。
(3)线路自动转换与里程自动校正模块:从LKJ 运行数据接收装置实时获取LKJ定位数据(车次号、交路号、车站号、线路号、行别、里程、信号机种类、信号机编号),从检测车检测系统主机实时获取检测车定位数据(线路号、行别和里程);对比LKJ线路号、行别和检测车线路号、行别,自动判断是否发生线路转换,并生成换线时的定位校正信息(车次号、交路号、车站号、检测车线路名称、行别、里程、信号机种类、信号机编号);对比检测车里程数据和LKJ里程数据,若两者之差超过里程校正阈值,自动生成定位校正信息。
(4)定位校正信息接口模块:与检测车检测系统进行通信,将定位校正信息发送至检测车检测系统。
3 工作原理、线路自动转换及里程自动校正流程
3.1 工作原理
考虑到现有的各专业检测车检测系统已经成熟应用、可靠性较高,而通用定位校正设备还需要通过较长时间的实际应用,来验证其稳定性和可靠性,现阶段检测车检测系统的定位仍以基于速度编码器累积计算里程为主,通用定位校正设备只为检测车检测系统提供定位校正信息。
(1)检测车在执行检测任务前,由检测人员使用检测车检测系统设置检测车的运行线路、行别和起始里程,并使用本设备的定位数据综合处理软件完成基础数据(如线路数据字典、接触网支柱数据字典)录入和参数(如机车与检测车的距离、里程校正阈值等)设置。
(2)检测车检测系统开始检测后,由本设备前端车载装置将获取的LKJ运行数据,通过无线传输发送给LKJ 运行数据接收装置;定位数据综合处理软件依据LKJ运行数据中的定位数据、检测车检测系统提供的定位数据、基础数据及设置参数,自动完成线路转换与里程校正,将生成的定位校正信息传输给检测车检测系统。
(3)检测车检测系统接收到通用定位校正设备发送的定位校正信息后,立即更新当前运行位置的定位数据。
若通用定位校正设备出现故障、无法提供定位校正信息时,检测车检测系统仍能利用原有的GPS里程校正和人工里程校正,并通过人工操作完成换线。
3.2 自动线路转换与自动里程校正算法流程
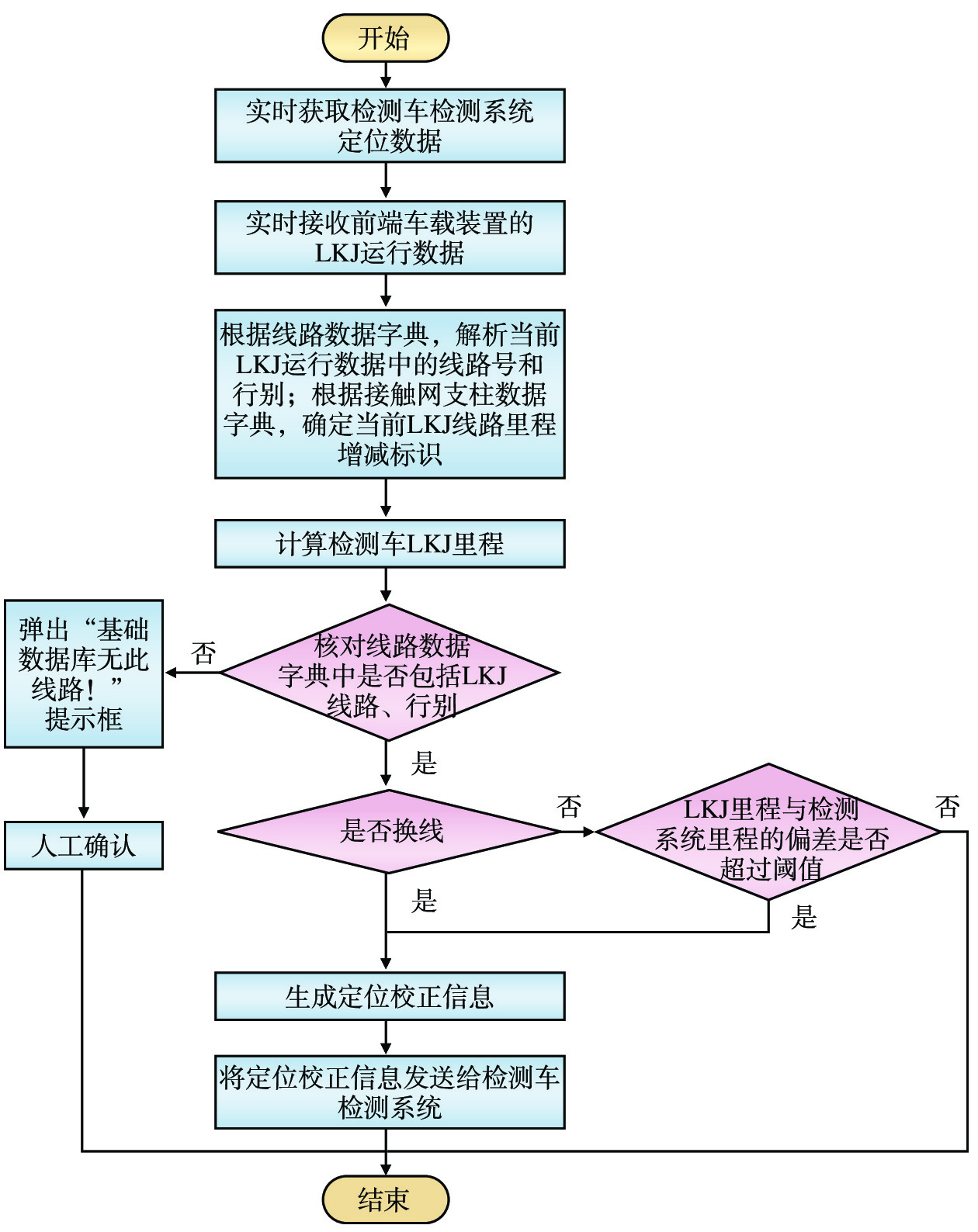
自动线路转换与自动里程校正算法具体流程如图7所示。
(1)从检测车检测系统主机实时获取检测车定位数据(线路名称、行别、里程数据),从LKJ 运行数据接收装置实时获取LKJ定位数据(车次号、交路号、车站号、线路号、行别标志、里程、信号机种类、信号机编号)。
(2)核对线路数据字典中是否包括LKJ线路号、行别;若不包括,弹出“基础数据库无线路号、行别的线路!”提示框,检测人员确认后,转入结束;若包括,则转入(3)。
(3)根据线路数据字典,解析当前LKJ线路号、行别标志对应的检测车线路名称、行别;根据接触网支柱数据字典,确定当前的LKJ线路里程增减标志F(1-递增,0-递减);并根据当前的LKJ里程LKJM,机车与检测车的距离D,以及当前LKJ线路里程增减标志F,计算检测车当前的LKJ里程LKJMc:LKJMc=LKJM − D(当F=1),或LKJMc=LKJM + D(当F=0)。
(4)对比LKJ线路名称、行别与检测车线路名称、行别是否完全一致;如果两者的线路名称和行别完全一致,转(5);如果两者的线路名称、行别存在不一致,则判断发生了换线,转(6)。
(5)判断检测车里程Mc与检测车LKJ里程LKJMc 的偏差是否大于等于里程校正阈值θ ; 当 | Mc - LKJMc | ≥ θ 时,转(6),否则转入结束。
(6)生成定位校正信息,包括车次号、交路号、车站号、线路名称、行别、检测车当前的LKJ里程LKJMc 、信号机种类、信号机编号。
(7)将定位校正信息发送给检测车检测系统。
4 现场试验分析
4.1 试验方案
试验主要验证该设备的适用性和可靠性,完成前端车载装置、LKJ运行数据接收装置和定位数据综合处理软件各项功能的现场动态测试。
(1)前期准备:在机车上安装前端车载装置,在检测车安装接收天线、定位机箱,在检测车检测系统主机上安装和运行定位数据综合处理软件,根据线路试验安排完成基础数据录入与参数设置。
(2)试验标准:
① 前端车载装置成功连接机车LKJ后,能实时采集LKJ运行数据,通过无线通信传输给检测车上的LKJ运行数据接收装置;在检测过程中,机车车载设备均正常工作,未受到加装的前端车载装置的影响;
② LKJ运行数据接收装置能够可靠接收前端车载装置发送的LKJ运行数据;
③ 定位数据综合处理软件能够根据LKJ运行数据,判断检测线路是否发生变化,以及对比检测车检测系统的里程与检测车LKJ里程之间的偏差是否超出阈值;当发现换线,或检测车检测系统的里程偏差超限时,立即生成定位校正信息,并发送给检测车检测系统;
④ 检测车检测系统在接收到定位校正信息后,能够自动更新定位信息。
4.2 试验结果分析
成都局电务检测车WX999293和接触网检测车WX999438在白天和晚上进行多次动态试验,运行里程共计
5515 km,历时185 h,此期间完成14次线路自动转换,试验概况如表3所示。表 3 试验概况序号 检测车 试验日期 试验线路 检测里程/km 测试时间/h 线路自动转换 1 电务试验车
WX9992932021年7月27—28日,
8月26日、10月24日宝成线、峨广线、成昆线、兴珞线 1637 45 完成2次线路自动转换,平均延迟10 s 2 接触网检测车
WX9994382024年5月11—16日 在内六线、沪昆线、黔桂线、成渝线 3878 140 完成12次线路自动转换,平均延迟8 s 试验表明:通用定位校正设备适用于成都局电务检测车和接触网检测车,前端车载装置与LKJ有可靠的接口隔离,不影响LKJ的正常运行,自动获取、解析 LKJ运行数据记录;LKJ运行数据接收装置准确接收和解析前端车载装置发送的LKJ运行数据;定位数据综合处理软件能够自动完成线路切换和里程校正,为检测车检测系统提供较为精准的定位校正信息。
由于定位数据综合处理软件在线路转换时的处理逻辑最为复杂,此时生成的定位校正数据误差最大。由表3可知,定位数据综合处理软件实现线路自动转换的平均延迟8~10 s,按检测车在线路切换区段的最大运行速度60 km/h计,最大定位误差为217 m。
5 结束语
本文对成都局现有的各专业基础设施检测车的定位技术进行系统分析,并对全局配属机车的LKJ设备配置情况进行充分调研,提出一种基于机车LKJ 运行数据的铁路基础设施检测车通用定位自动校正设备的设计;在机车上加装前端车载装置,实时获取和解析LKJ运行数据,通过无线通信传输至检测车;检测车上加装的LKJ 运行数据接收装置接收LJK运行数据后,由定位数据综合处理软件完成自动线路转换和里程校正,有效解决了成都局山区铁路线路隧道多、无法全程利用GPS信号实现有效的里程校正、换线时需人工操作等问题。该设备通用性强,适用于成都局配属的各专业基础设施检测车,安装简单快捷,与LKJ装置的接口具备完善的电气隔离,不影响LKJ装置的正常运行。
目前,铁路基础设施检测通用定位自动校正设备已在成都局电务检测车和接触网检测车上进行了初步动态测试。下一步,将研究减少线路自动转换的延迟时间的措施,开展机车与检测车长间距条件下的定位精度测试,并在轨道检测车、综合巡检车上进行动态试验,以持续完善该设备,不断提升该设备定位校正的精准度,以及设备的适用性和可靠性。
-
表 1 LKJ运行数据接口信息表
序号 内容 偏移 字节数 内容说明 1 包头 0 2 0x55 0x01 2 包号 2 1 0-FF循环 3 车次种类标识 3 4 4 车次号 7 3 5 交路号 10 1 6 车站号 11 2 7 信号机种类 13 1 8 信号机编号 14 2 9 公里标 16 3 10 线路号 19 2 工务实际线路号 11 线路标志 21 1 D6-D4:预留;D1:1-上行;D0:1-下行 12 时速 22 3 13 预留 25 6 固定填0 14 校验位 31 1 为序号2到序号13的所有字节累加和的
二进制补码合计 32  下载: 导出CSV
下载: 导出CSV
表 2 各专业检测车的检测系统、检测项目和定位标识
专业 检测系统 检测项目 定位标识 工务 轨道检测系统 轨距、轨向、高低、水平、
三角坑、轨距变化率等轨道
几何不平顺参数线路+行别+公里标 电务 信号检测系统 轨道电路、应答器、补偿电容、牵引回流等参数 线路+行别+公里标+
区间+轨道电路区段通信检测系统 GSM -R服务质量、GSM -R场强覆盖、电磁环境、电路域数据通信质量等参数 线路+行别+公里标 供电 弓网检测系统 接触线高度、拉出值、高差等接触网几何参数,以及弓网接触力、硬点等弓网动态作用
参数线路+行别+公里标+
区间+桥隧名+接触网
支柱号接触网悬挂状
态检测系统接触网悬挂松、脱、卡、磨、断等缺陷 同上
下载: 导出CSV
表 3 试验概况
序号 检测车 试验日期 试验线路 检测里程/km 测试时间/h 线路自动转换 1 电务试验车
WX9992932021年7月27—28日,
8月26日、10月24日宝成线、峨广线、成昆线、兴珞线 1637 45 完成2次线路自动转换,平均延迟10 s 2 接触网检测车
WX9994382024年5月11—16日 在内六线、沪昆线、黔桂线、成渝线 3878 140 完成12次线路自动转换,平均延迟8 s
下载: 导出CSV
-
[1] 郭 瑞,陈唐龙. 基于图像处理的接触网支柱杆号识别[J]. 湖南工程学院学报,2019,29(1):18-21. [2] 朱家诚,吴 彬,吴焱明,等. 铁路接触网巡检无人车自动定位系统研究[J]. 机械设计与制造,2018(3):160-163. DOI: 10.3969/j.issn.1001-3997.2018.03.048 [3] 许 勇,邵浩东. UWB地铁轨道巡检车定位系统设计[J]. 机械设计与制造,2023(5):138-140,145. DOI: 10.3969/j.issn.1001-3997.2023.05.028 [4] 宋佳明,占 栋,陈唐龙. 接触网巡检系统空间综合定位方法[J]. 城市轨道交通研究,2023,26(9):116-121. [5] 刘玉江,杨 吉,孟景辉. 基于TAX数据的定位技术在电务检测车上的应用[J]. 铁道通信信号,2016,52(8):19-21. [6] 许海波. 铁路接触网无人检测车定位系统的研究与开发[D]. 合肥:合肥工业大学,2018. [7] 孟景辉. 绝缘节定位在铁路专业检测车中的应用探讨[J]. 铁道标准设计,2017,61(3):148-152. [8] 康 熊,王卫东,李海浪. 高速综合检测列车关键技术研究[J]. 中国铁路,2012(10):3-7. DOI: 10.3969/j.issn.1001-683X.2012.10.002 -
期刊类型引用(1)
1. 王自韧,沈炳华,吴焕文. 港口散货码头智能牵引机车. 起重运输机械. 2025(08): 58-63 .  百度学术
百度学术
其他类型引用(0)

计量
- 文章访问数: 31
- HTML全文浏览量: 11
- PDF下载量: 12
- 被引次数: 1
