

Dynamic detection system for geometric parameters of overhead contact system based on binocular 3D vision technology
-
摘要:
针对目前接触网几何参数检测设备工作效率低、精度不高的问题,采用双目3D视觉成像、结构光图像采集和图像处理等技术,研制了接触网几何参数动态检测系统。该系统主要由接触网图像采集装置、车体偏移图像采集装置、增量式编码器、图像数据转换装置、主机及检测软件组成,可随不同车载平台以0~120 km/h速度运行,能够在强光、低照度等天气条件下实现接触网导高、拉出值的动态非接触式检测,自动识别触网导高、拉出值异常,生成指导接触网精调和日常巡检所需的异常报表和标注文档。系统设备轻便、易于安装,并提供了有效的标定方法。在实验室搭建测试平台,进行导高、拉出值测试和车体振动位移修正测试,并在北京地铁某运营线路上进行初步动态测试。测试结果表明,该系统能够稳定地动态采集高清图像,接触网导高、拉出值测量精度误差低于5 mm,能够满足铁路、地铁和轻轨等接触网新建施工精调作业和运营线路接触网日常巡检作业需要。
Abstract:To deal with the low efficiency and low accuracy of current contact network geometric parameter detection equipment, a dynamic detection system of OCS geometric parameters has been developed using binocular 3D vision imaging, structured light image acquisition, and image processing. This system mainly consists of a OCS image acquisition device, a carboy offset image acquisition device, an incremental encoder, an image data conversion device, a host, and detection software. Installed on a vehicle at a speed of 0~120 km/h, it can achieve dynamic non-contact detection of the OCS's height and pull-out values and under strong light or low light, and automatically identify anomalies in the height and pull-out values of the OCS, generate anomalies report and annotated document to guide the fine adjustment and daily inspection of the OCS. Its equipment is lightweight, easy to install, and has effective calibration methods. A testing platform is built in the laboratory to conduct tests on lead height, pull-out value, and vehicle vibration displacement correction, and conducted preliminary dynamic tests on a operating line of the Beijing subway. The test results show that the system can stably and dynamically collect high-definition images, with measurement accuracy errors of less than 5 mm for the height and pull-out values of the overhead contact system. It can meet the needs of precision adjustment operations for newly constructed OCSs of railway, subway, or light rail lines as well as daily inspection operations for the OCSs of operating lines.
-
接触网是电气化铁路牵引供电系统的重要装备之一,沿钢轨上空架设,为线路上运行的高速列车提供动力[1]。接触网裸露在野外受到外界的影响,且工作时要承受大电流冲击以及受受电弓振动影响,容易发生故障,是供电系统中最易出问题的一个环节[2]。一旦接触网发生故障,会造成铁路运营中断,甚至重大安全事故。接触网几何参数是描述接触网结构特性和工作状态的一系列数值指标,反映了接触网的几何形状、位置关系以及与电力机车受电弓的相互作用情况,这些参数对于保证电力机车的稳定供电和安全运行至关重要。
接触网几何参数的日常检测是接触网运行状态检测的重要组成部分,保持接触网几何参数处于合理范围内是保障弓网关系状态良好的前提。目前,对于接触网导高、拉出值等关键几何参数的检测,主要有接触网测量杆、分体式和一体式车载检测仪等人工检测方式,以及接触网图像智能识别自动检测方式。使用接触网测量杆检测时,检测人员将测量杆一端搭在接触线上,另一端搭在钢轨面上,然后由人工判读数据,效率低下且精度不高。分体式车载检测仪采用检测仪与巡检小车相分离的结构,体积大且笨重,不适宜在检测现场长时间高频率使用。一体式车载检测仪虽然解决了结构分离问题,但测量时仍然需要人工推行巡检小车,检测速度最高仅为3 km/h,精度只能达到厘米级,且当推行速度达到4 km/h甚至更高速度时,将无法获取清晰的接触网图像。接触网图像智能识别自动检测设备主要有接触网安全巡检装置(简称:2C装置)和接触网悬挂状态检测监测装置(简称:4C装置),通过采集接触网高清图像,实现接触网图像智能识别[3]。目前,图像智能识别以模式匹配算法为主,主要用于接触网鸟窝、危树、废弃支架等缺陷识别检测[4-5],对接触网导高、拉出值等几何参数的测量误差较大。
本文采用双目3D视觉成像、结构光图像采集和图像处理等技术,研究开发了一套接触网几何参数动态检测系统(简称:接触网检测系统),通过采集和分析处理接触网结构和钢轨的高清图像,完成接触网导高、拉出值的精确测量,实现非接触、高精度、自动化检测作业,为保障铁路供电系统的可靠性与高品质提供先进技术装备。
1 接触网几何参数检测内容及系统设计目标
1.1 接触网几何参数检测内容
接触网几何参数是指接触网系统中各种几何尺寸和位置的参数,通常包括导高、拉出值、轨距、超高、侧面限界等,这些几何参数的准确测量和调整对于确保接触网的性能至关重要。其中,导高和拉出值的准确性直接影响电力机车受电情况,轨距和超高的准确性则关系到列车稳定性和安全性,侧面限界和高差的测量可确保列车在运行过程中的空间需求得到满足。通过定期检测和维护这些几何参数,可以保证接触网的正常运行,避免因参数不当导致的供电中断或安全事故。
本文研究开发的接触网几何参数动态检测系统主要完成接触网导高和拉出值的测量。
1.2 系统设计目标
(1)实现接触网导高和拉出值的高精度、高效率动态检测:能够随不同车载平台以0~120 km/h速度运行,实时采集接触网图像数据并快速进行分析处理,准确计算出接触网导高、拉出值检测数据;接触网导高测量范围在
4000 m~4500 m时,精度误差≤2 mm,测量范围在4500 m~6000 m时,精度误差≤5 mm;拉出值检测精度≤5 mm。(2)适用于复杂天气条件下接触网几何参数测量:在强光、低照度等天气条件下,也能完成接触网导高和拉出值的高精度检测。
(3)自动完成缺陷诊断:自动识别接触网导高和拉出值异常,生成指导接触网精调和维修所需的信息资料。
(4)易于安装:设备各组件容易在轨检小车和综合检测车等车载平台上快速完成安装。
2 系统构成
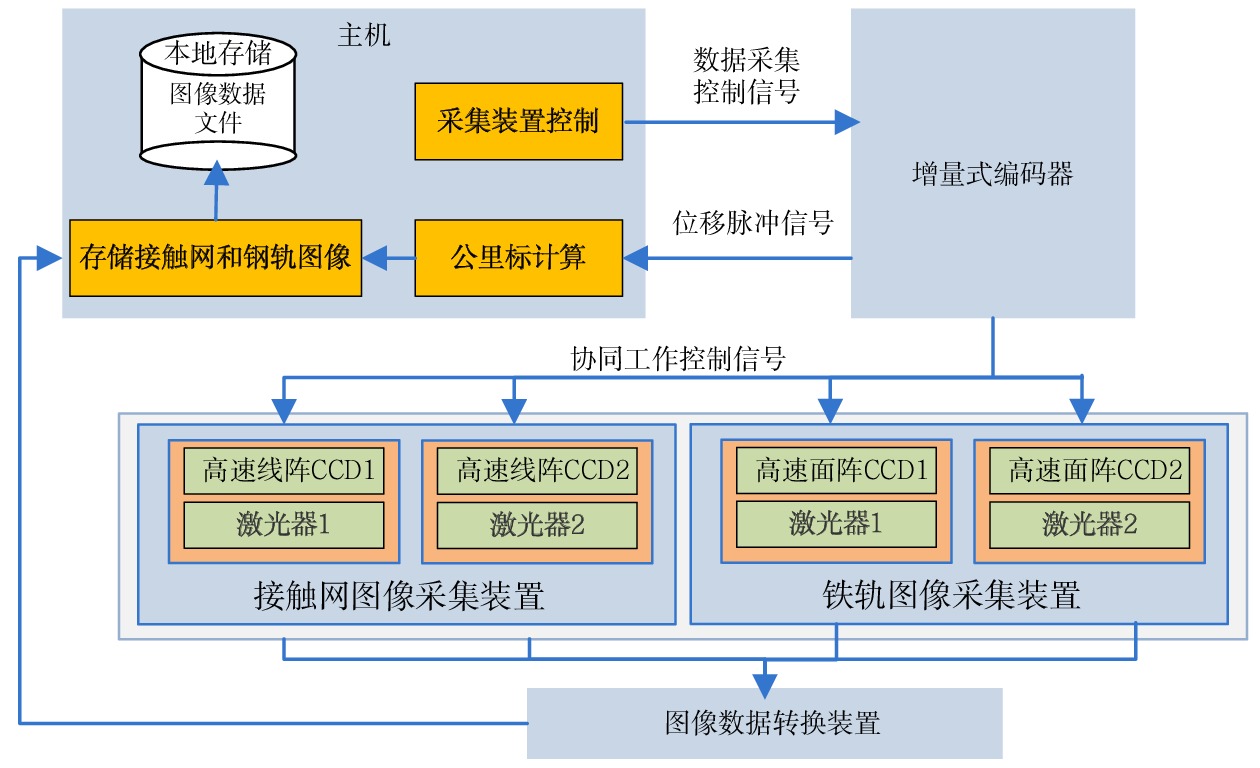
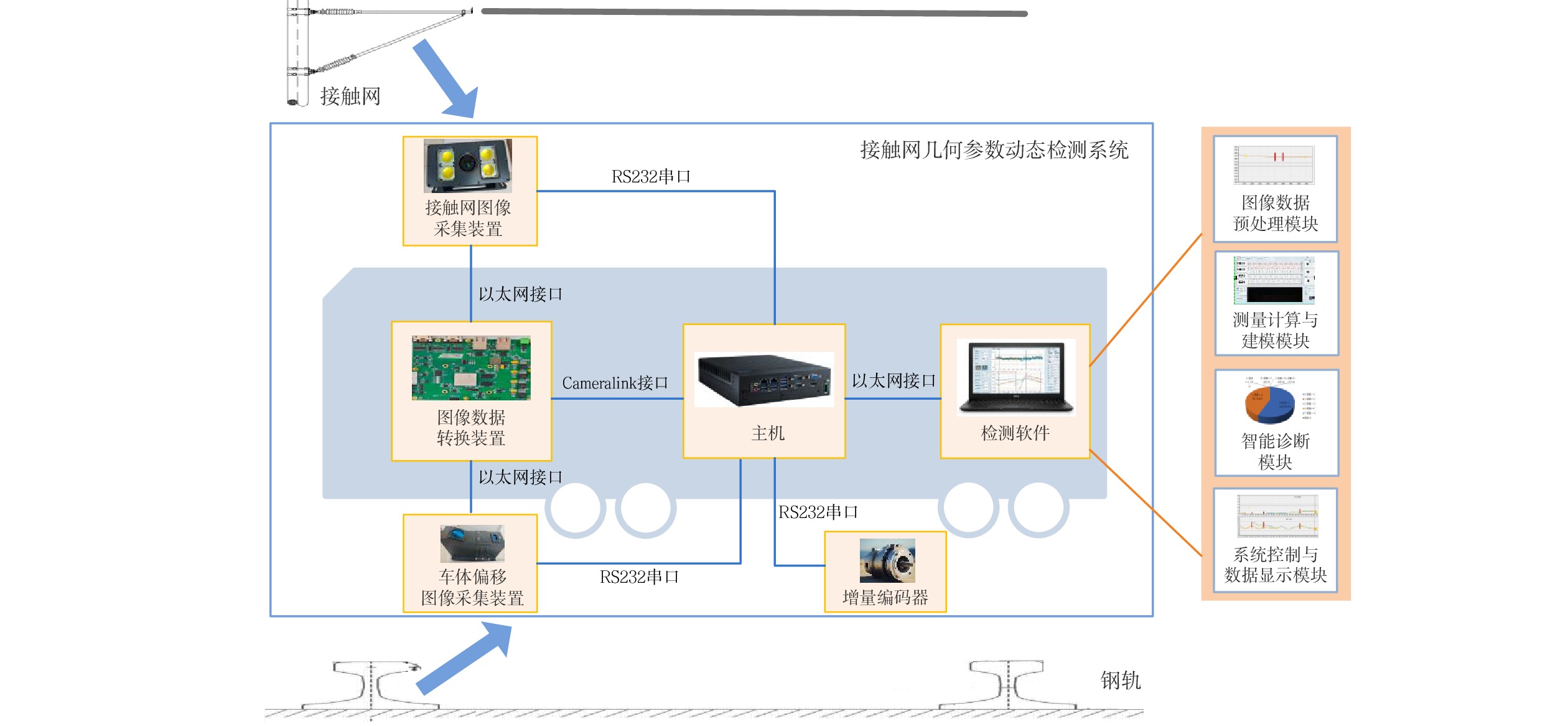
接触网检测系统主要由接触网图像采集装置、车体偏移图像采集装置、增量式编码器、图像数据转换装置、主机和检测软件组成,如图1所示。
(1)接触网图像采集装置:安装在检测车顶部
1500 mm × 500 mm长宽的基板(位于接触网正下方)上,通过以太网接口与图像数据转换装置连接,通过RS232串口与主机连接;由2套高速线阵CCD相机、激光器、镜头、棱镜和滤光片等光学部件组成,能够静态、动态采集接触网结构原始高清图像。(2)车体偏移图像采集装置:安装在检测车车体底部两侧,通过以太网接口与图像数据转换装置连接,通过RS232串口与主机连接;由两套高速面阵CCD相机、激光器、镜头等光学部件组成,能够采集钢轨图像数据,用于计算车体偏移量,以修正接触网几何参数检测误差,消除因车辆晃动、钢轨不平顺、线路坡道、弯道等因素对测量结果的影响。
(3)增量式编码器:安装在检测车的车轴上,通过RS232串口与主机连接;当检测车车轮前进旋转时,每增加一定位移,编码器就将位移转换成周期性电信号,并向主机输出一个位移计数脉冲信号,用于计算检测车相对于初始位置的位移。
(4)图像数据转换装置:安装在检测车机柜内,通过CameraLink接口与主机连接,通过以太网接口分别与接触网图像采集装置和车体偏移图像采集装置连接,接收高速CCD相机采集的接触网结构和轨道结构原始图像数据,使用现场可编程门阵列(FPGA,Field-Programmable Gate Array),将原始图像数据按照预定义的数据格式,转换成标准的CameraLink接口数据。
(5)主机:安装在检测车机柜内,通过以太网接口连接运行检测软件的检测用笔记本电脑。当接收到检测软件发出的启动指令时,主机启动接触网图像采集装置和车体偏移图像采集装置的供电,并通过增量式编码器使高速CCD相机和激光器同步协同工作,确保采集到清晰的图像及准确的测量数据;根据增量式编码器输出的位移计数脉冲信号,实时计算检测车当前位置公里标;读取图像数据转换装置生成的CameraLink接口数据,并附加上检测车当前位置公里标后,将图像数据保存在本地硬盘中,供检测软件进行后续处理。
(6)检测软件:一组安装在检测用笔记本电脑上的软件程序,包括图像数据预处理、测量计算与建模、智能诊断、系统控制与数据显示4个模块。
①图像数据预处理模块:读取主机硬盘中原始图像数据,完成图像对比度增强、随机噪声去除等处理;从接触网和钢轨原始图像中提取待测对象结构表面所有特征点的二维坐标,并将其转换成世界坐标系中三维坐标。
②测量计算与建模模块:根据待测接触网结构和钢轨结构的三维坐标,计算出接触网的导高和拉出值测量数据,自动生成待测接触网结构的三维模型,用于直观显示接触网导高和拉出值。
③智能诊断模块:自动识别接触网导高、拉出值等异常状态,生成接触网几何参数异常报表、异常部位图像和异常标注文件,为接触网精调或维修提供指导。
④系统控制与数据显示模块:提供设置接触网检测系统配置参数及启动和关闭接触网检测系统的操作界面;提供检测数据显示界面如图2所示,便于检测人员掌握接触网区段整体几何状态;提供检测过程数据回放、查询和标记的操作界面。
3 工作过程
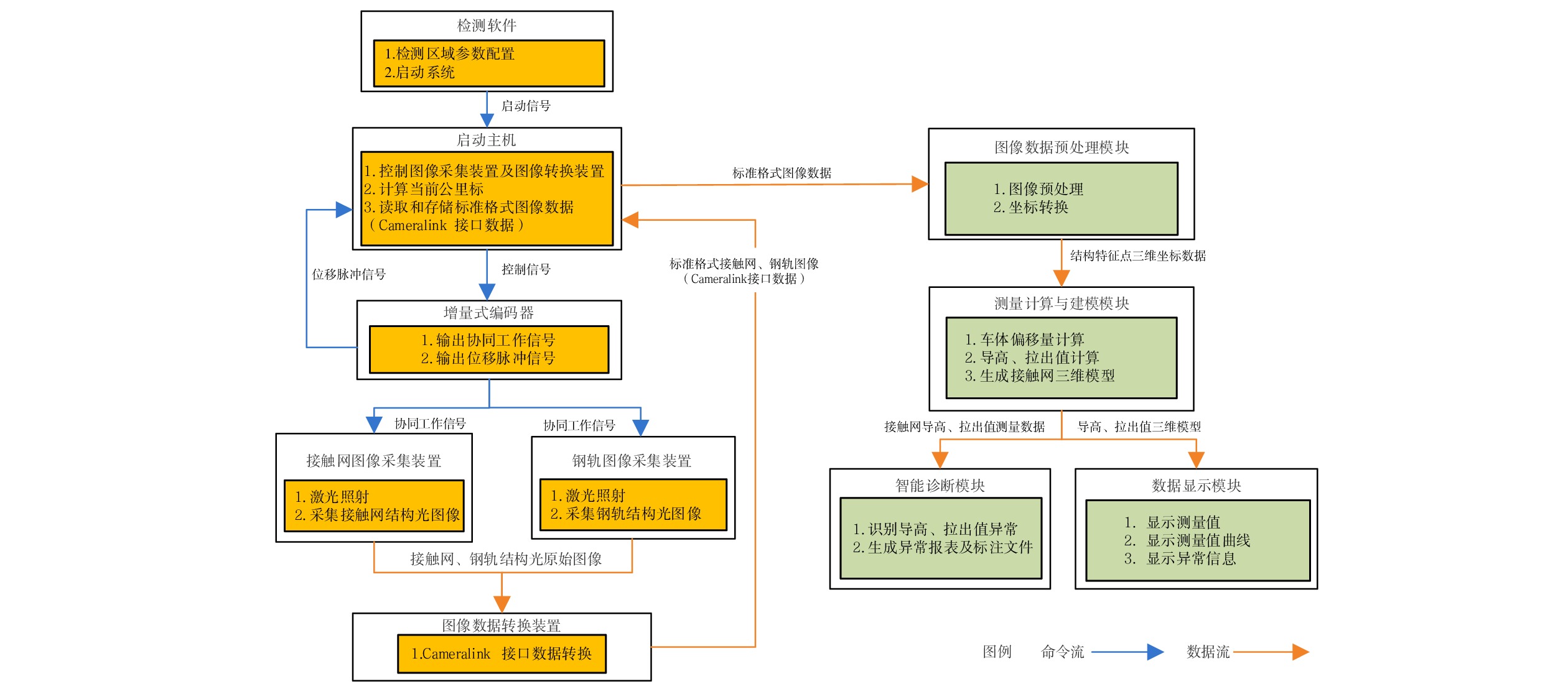
以综合检测车作为车载平台时,接触网检测系统的工作过程如图3所示。
(1)检测人员将检测用笔记本电脑与接触网检测系统主机连接,主机开机后,检测人员运行检测软件,完成检测区间参数配置,设置线路名称、线路行别(上下行)、接触网起始杆号、起始公里标等参数;在检测车启动的同时,启动主机。
(2)主机接收到启动命令后,开启接触网图像采集装置、车体偏移图像采集装置、图像数据转换装置的供电,并通过增量式编码器输出的脉冲信号使接触网图像采集装置和车体偏移图像采集装置同步协同工作,同时利用增量式编码器输出的位移计数脉冲信号完成公里标的累加,实时计算检测车当前位置公里标。
(3)接触网图像采集装置的激光器发出激光照射待测接触网结构,其高速线阵CCD相机采集反射回的接触网结构光原始图像;车体偏移图像采集装置的激光器发出激光照射钢轨,其高速面阵CCD相机采集反射回的钢轨结构光原始图像。
(4)接触网结构光原始图像和钢轨结构光原始图像输入图像数据转换装置,被转换成标准格式的CameraLink接口数据。
(5)主机读取图像数据转换装置生成的CameraLink接口数据,并附加上检测车当前位置公里标后,将标准格式原始图像数据保存在本地硬盘中。
(6)图像数据预处理模块读取主机硬盘中存储的标准格式原始图像数据,完成图像对比度的增强、随机噪声去除等处理,将其转换为预处理图像;从接触网和钢轨预处理图像中提取待测结构表面所有特征点的二维坐标,并转换成世界坐标系中三维坐标。
(7)测量计算与建模模块先由钢轨结构的三维坐标计算出车体偏移量,再由待测接触网结构的三维坐标数据及车体偏移量计算出接触网导高和拉出值测量数据,并自动生成待测接触网结构的三维模型。
(8)智能诊断模块分析接触网导高和拉出值测量数据,自动识别接触网导高、拉出值等异常状态,生成接触网几何参数异常报表、异常部位图像和异常标注文件。
(9)数据显示模块实时显示接触网几何参数测量数据及在检接触网区段的测量值曲线,便于检测人员掌握接触网区段整体几何状态,以指导作业人员快速完成接触网精调或维修。
人工推行的检测小车行进速度较慢,自身车体振动影响较小,可以忽略车辆振动偏移因素。当接触网检测系统搭载到检测小车上时,可以简化系统配置,无需在车底安装车体偏移图像采集装置,其工作流程与搭载在综合检测车上的工作流程大致相同。
4 关键技术
4.1 双目3D视觉成像及结构光图像采集
单目视觉技术通过单台相机采集待测对象的平面图像,其装置结构和相机标定比较简单,但获取立体几何信息和测量深度信息的能力较弱,不能满足接触网导高、拉出值等几何参数的检测精度需求。双目3D视觉成像技术模拟类似人眼的视觉功能,利用双目成像视差原理和立体匹配方法,可实现对待测对象立体几何参数的精准测量。
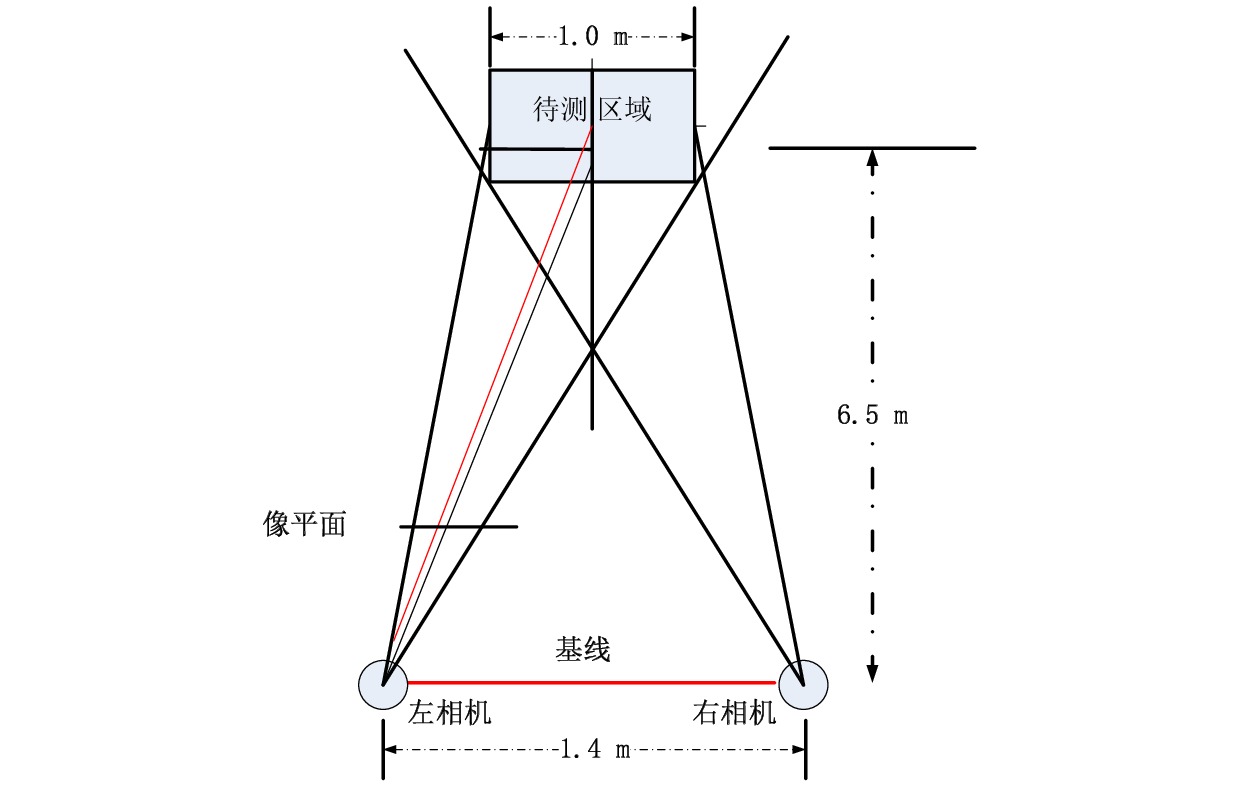
本文将2套高速线阵CCD相机对称地安装在检测车或者其它车载平台的基板上,使其光轴与激光器的光轴相平行,2个中心光轴对称相交,形成三角关系,该三角平面与铁路轨道面垂直[6]。由2套高速线阵CCD相机同步获取待测接触网结构的2幅图像后,通过视差原理解析还原,可实现对接触网关键部件三维数据的高精度测量。为满足待测接触网高度4 m~6.5 m、等间距数据采样精度小于5 mm的动态检测需求[7],采用频率80 kHz、线分辨率8 K、点阵大小6.4 μm的高速线阵CCD相机。对于轨距1.4 m、最大导高6.5 m、待测区域长度1.0 m的双目3D视觉成像,其原理如图4所示。
另一方面,接触网结构形状复杂,且直接暴露在露天环境下,光线较弱或过强时都会造成图像质量下降,从而影响接触网结构几何参数的特征提取和检测精度。在光线较弱或微光条件下,高速线阵CCD相机传感器接收到的光子数量减少,信号强度减弱,提高ISO感光度会明显增加图像噪声,增加曝光时间会导致图像模糊,成像时会产生大量噪点,使采集到的接触网图像模糊不清。在强阳光照射条件下,高速线阵CCD相机传感器也会因光线饱和而无法准确识别焦点,成像时产生光晕或者耀斑,无法正确采集待测部件的暗部细节。
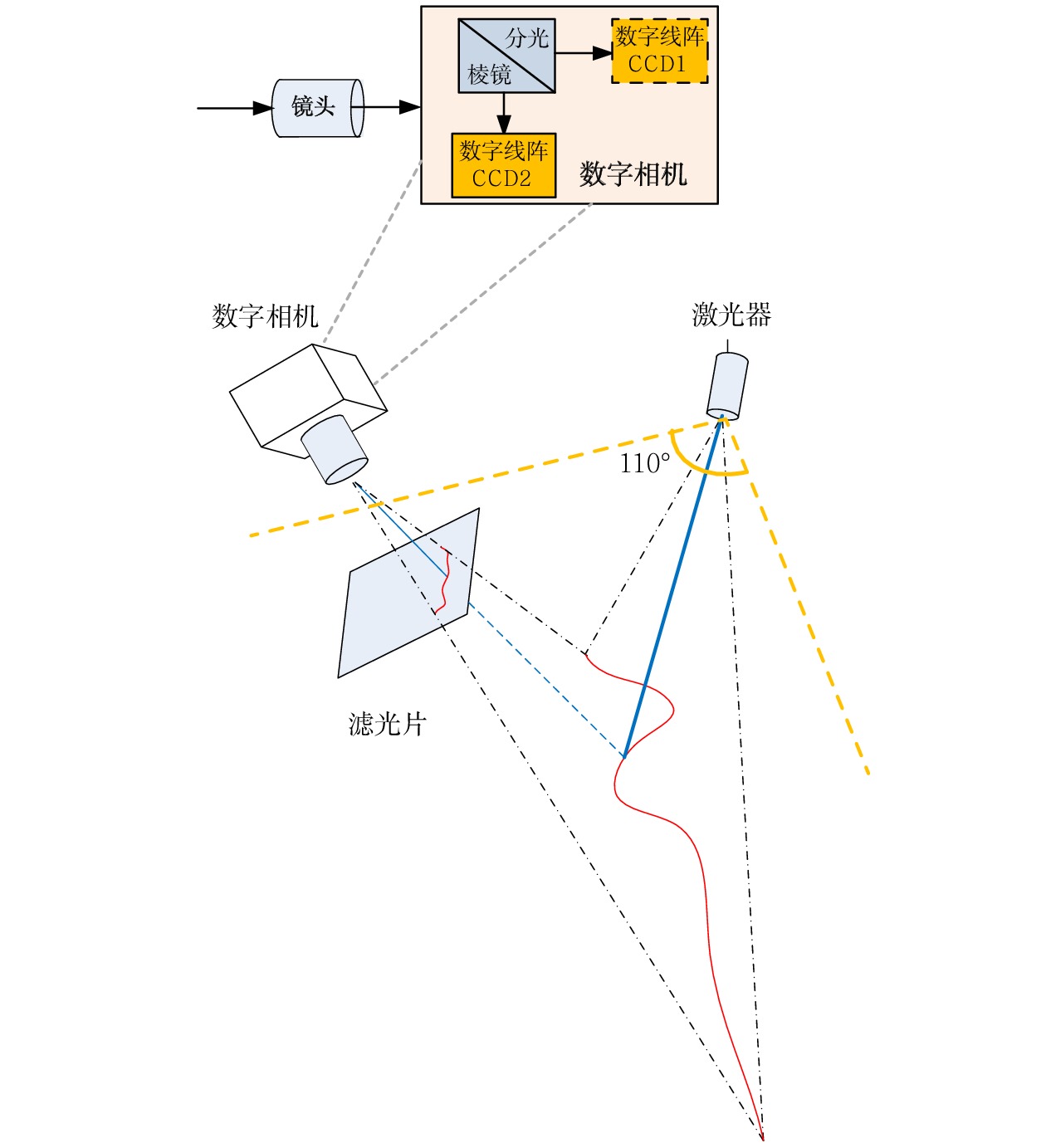
为有效解决上述问题,通过滤光片滤光和棱镜分光技术,将入射光通过棱镜分为两组光束,分别进入两个不同的高速线阵CCD相机,有效解决强光干扰问题。同时,为满足覆盖整个接触网测量范围、且实际拉出值误差≤5 mm的要求,本文采用中心波长808 nm、激光线宽1 mm,光板均匀度大于85 %、物距
6500 mm、最大功率为10 W的近红外半导体定制激光器,并将激光光源的扇出角设置为110°,将特定的激光线线条图像,投射到待测对象的表面,由高速线阵CCD相机采集反射的结构光图像,再通过图像处理算法,分析因待测对象影响造成的激光线图像变化,以计算出物体的位置和深度等信息,进而生成整个三维图像,如图5所示。4.2 高速线阵CCD相机抗失真标定
使用高速线阵CCD相机采集接触网结构图像时,由于受光学透镜固有的透视失真以及相机位置和角度偏差等因素影响,采集的图像会出现变形和失真,导致实际测量结果与真实值之间存在较大误差。
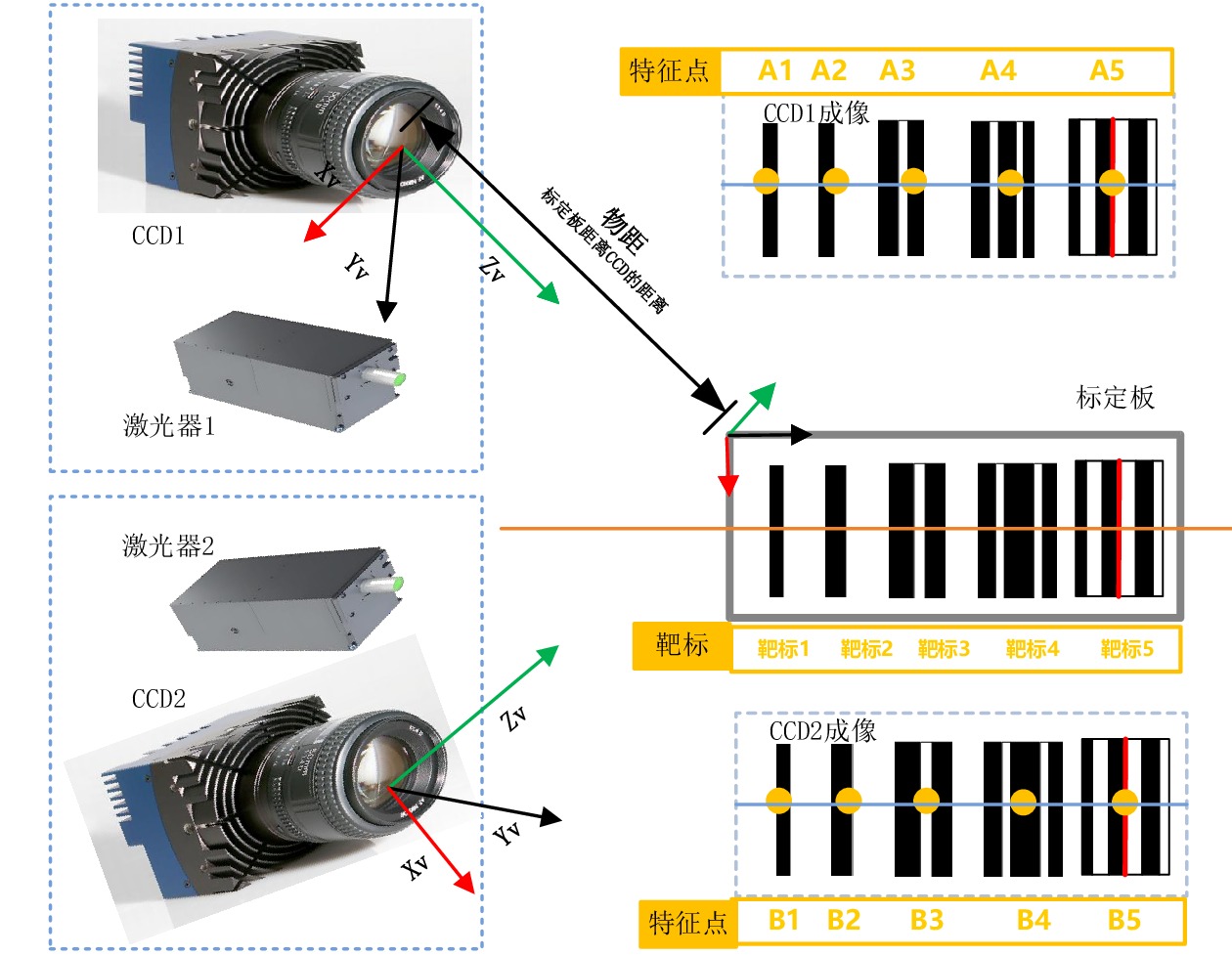
在一张带有固定间距线阵图案的标定板上设置5 个线状靶标,即(靶标1、靶标2、靶标3、靶标4、靶标5)。将接触网图像采集装置中高速线阵CCD1拍摄的5个靶标与激光线的交点视为5个控制点,即(A1、A2、A3、A4、A5),将接触网图像采集装置中高速线阵CCD2与激光线的交点视为5个控制点,即(B1、B2、B3、B4、B5),将两个相机各自拍摄的 5 个控制点视为 5 组 控 制 点 对 , 即(A1,B1)(A2,B2)、(A3,B3)、(A4,B4)、(A5,B5)。在进行标定时,设定一个固定的物距(标定板到CCD成像中心的距离),由CCD相机拍摄一对标定板图像,经过N 次调整标定板到CCD相机的物距,得到 N对标定板图像,如图6所示。
计算标定板图像上控制点对之间的连线与激光投射面的交点,建立控制点对坐标和交点坐标之间的映射关系,进而求解出高速线阵 CCD 相机的定向参数值。这些参数的准确性直接影响视觉测量的精度,因此通过标定可以显著提高测量的准确性和可靠性。
4.3 高速CCD相机与激光器协同控制及图像定位
使用双目3D视觉测量时,必须同步控制接触网图像采集装置和车体偏移图像采集装置的两套高速CCD相机与激光器时序电路的工作节拍,让它们在同一时间点采集接触网结构和钢轨结构的激光反射图像,生成同步的立体图像对,否则将无法精确测量接触网几何参数。另外,系统采集的接触网结构图像和钢轨结构图像必须要标注上公里标定位信息,才能生成用于指导接触网精调和维修的检测数据。
高速CCD相机和激光器协同控制及图像定位原理如图7所示。
在检测车运行过程中,主机通过增量式编码器发出的脉冲,给高速CCD相机和激光器同步发出一个协同工作控制信号,控制接触网图像采集装置和车体偏移图像采集装置的两套高速CCD相机与激光器同步工作,完成接触网结构光原始图像和钢轨结构光原始图像的采集,再由图像转换装置转换为标准格式原始图像。
本文使用增量式编码器输出的脉冲信号实现检测车定位信息采集。增量式编码器安装在检测车车轴上,检测车车轮前进旋转时,每增加一定位移,编码器会将位移转换成周期性电信号,并向主机输出一个位移计数脉冲信号。主机通过位移计数脉冲信号数量,即可计算出检测车相对于初始位置的位移,实现公里标的累加,进而得到检测车当前位置公里标。
主机从图像数据转换装置的数据接口读取标准格式的接触网和铁轨结构光原始图像数据,并附加上检测车当前位置公里标信息,将原始图像数据保存再本地存储中,供检测软件后续进行处理。检测车当前位置P的公里标计算公式为
$$ {P=P}_{ \mathrm{0}} {+n\cdot d} $$ (1) 其中,P0为检测车启动时手动输入的初始公里标数据,n为脉冲信号个数;d为1个位移计数脉冲信号周期内检测车行进的距离。
4.4 车体振动偏移修正
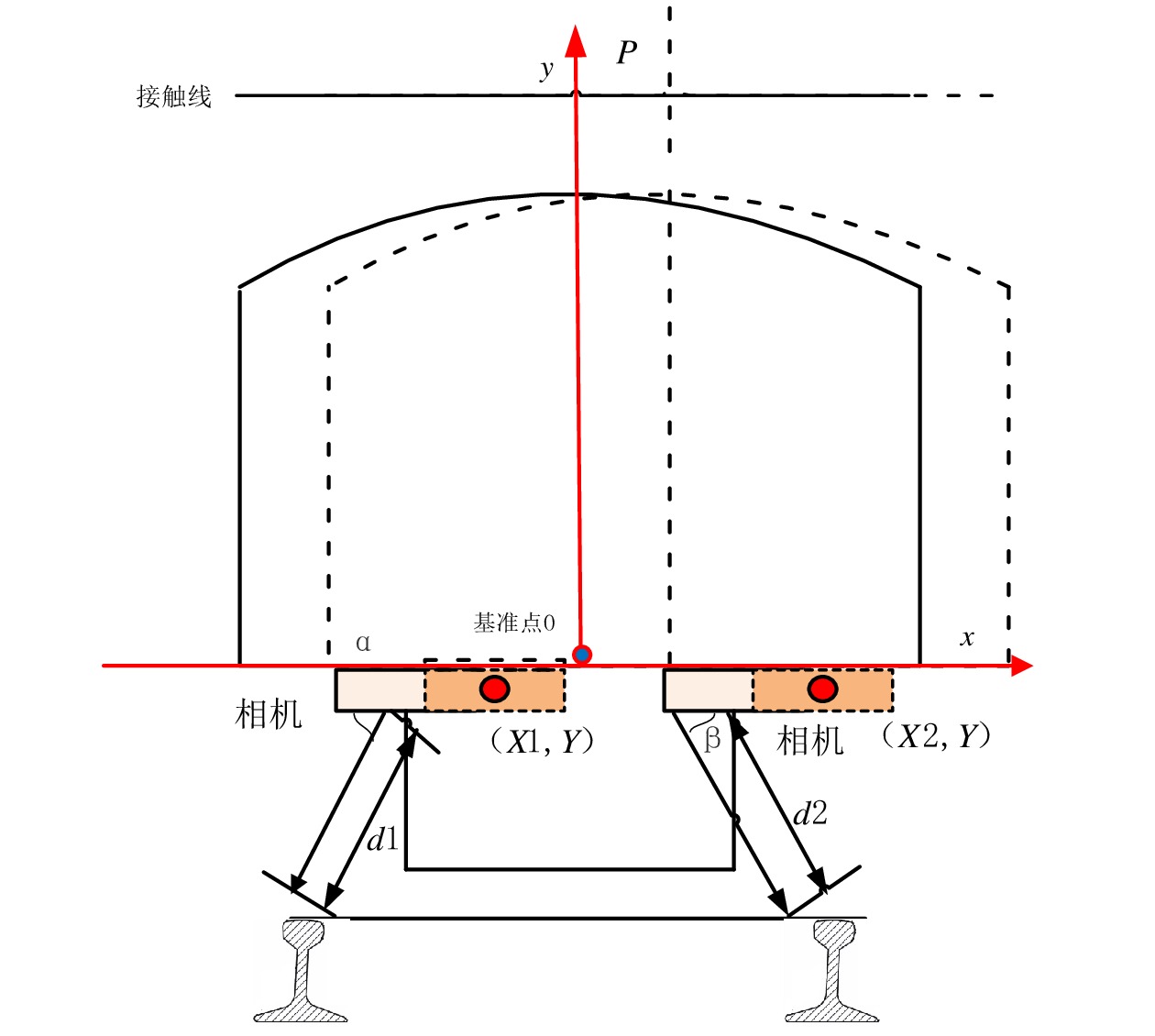
本文假定左右两侧铁轨对应特征点之间的连线与轨道中心线的交点为基准点O。检测车在运行过程中,受车体自身振动、钢轨不平顺、弯道及坡道等因素的影响,测量的参考点与系统预设的基准点无法完全重合,从而导致安装在车顶的高速线阵CCD相机采集的接触网几何参数产生偏移。
为消除车体相对于轨道装置面的侧滚位移和车体的横摆位移影响,通过车体偏移图像采集装置采集铁轨图像,经过一些列特征点的提取和计算来确定车体左右偏移量和车体倾斜偏移量。当检测车静止时,车体偏移图像采集装置采集钢轨数据,计算各个相机相对于最近钢轨的水平距离,并将该距离设定为初始状态的标定距离。当检测车运行时,车体偏移图像采集装置采集钢轨数据,计算车体动态运行中两台高速CCD相机相对于基准点的水平距离,可以得到车体横向偏移量P。
如图8所示,当车体左右偏移时,车体水平横向偏移量P 的几何关系式为
$$ {P=(x}_{ \mathrm{1}} {+x}_{ \mathrm{2}} \mathrm{)/2} $$ (2) 其中,x1、x2分别为两台高速CCD相机坐标系下,每台相机相对基准点O的x轴坐标值,车体纵向偏移量Δd = d1sinα-d2sinβ,当车体仅发生左右偏移时,Δd的理论值为0。因此,在实际检测中,当Δd足够小时,可认为仅发生了左右偏移,只需用P值来修正横向测量结果。
而当车体发生较大的倾斜偏移时,计算车体动态运行中两台高速CCD相机对于基准点O的上下偏移,可得到车体纵向偏移量Δd,通过P和Δd来修正因检测车晃动、钢轨不平顺、弯道及坡道等对接触网导高和拉出值检测精度的影响。
4.5 对象特征点二维像素坐标到世界坐标系中三维坐标转换算法
接触网导高和拉出值测量与建模时,将两台高速线阵CCD相机,在同一时间点,同时采集的同一待测对象的左右两幅原始图像,视为一组立体图像对。但这些立体图像对,没有和待测对象实际物理结构形成相应的映射关系,需要将待测对象图像中的二维像素坐标转换为世界坐标系中待测对象实际物理结构的三维坐标。
本文先从立体图像对的左图上,选择与实际物理结构相应的图像特征,再从立体图像对的右图上,确定同一物理结构的对应图像特征,逐一将同一个空间上的所有物理点,与其在不同图像中的映射点一一对应起来,利用这两个特征之间的相对位置,计算出视差,进而确定深度图像,实现对接触网导高和拉出值的测量[8]。将所有测量数据转换为待测对象特征点所对应的位置世界坐标后,即可同步构建待测对象3D模型。假定待测对象图像中特征点的二维像素坐标为(u, v),与之相应的世界坐标系下的三维坐标为(x, y, z)。待测对象图像中特征点的二维像素坐标计算公式为:
$$ \left\{\begin{array}{c}u=\dfrac{{x}}{{d}{x}}+{{u}}_{0}\\ v=\dfrac{{y}}{{d}{y}}+{{v}}_{0}\end{array}\right. $$ (3) 其中,u0、v0表示图像的中心像素坐标,与图像原点像素坐标之间相差的横向和纵向像素数;dx、dy表示图像像素的实际物理大小。其与世界坐标系中待测对象的三维坐标的转换矩阵为:
$$ \left(\begin{array}{l} x \\ y \\ z \end{array}\right)=\left(\begin{array}{ccc} d x & 0 & -u_0 d x \\ 0 & d y & -v_0 d y \\ 0 & 0 & 1 \end{array}\right)\left(\begin{array}{l} u \\ v \\ 1 \end{array}\right) $$ (4) 再将图像物理坐标转换为相机坐标(Xc, Yc, Zc):
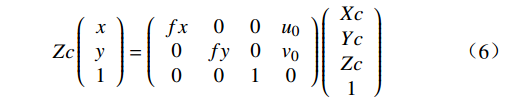
$$ \left\{\begin{array}{c}x=fx\dfrac{{X}{c}}{{Z}{c}}+{{u}}_{0}\\ y=fy\dfrac{{Y}{c}}{{Z}{c}}+{{v}}_{0}\end{array}\right. $$ (5) 转换矩阵表示为:
$${Zc}\left(\begin{array}{l} {x} \\ {y} \\ {1} \end{array}\right)=\left(\begin{array}{cccc} {fx} & 0 & 0 & {u}_0 \\ 0 & {fy} & 0 & {v}_0 \\ 0 & 0 & 1 & 0 \end{array}\right)\left(\begin{array}{c} {Xc} \\ {Yc} \\ {Zc} \\ 1 \end{array}\right) $$ (6) 其中,fx、fy是相机焦距f除以dx、dy得到的值,Xc、Yc和Zc分别是相机坐标系下的x、y和z值;
最后,将相机坐标(Xc, Yc, Zc)还原成世界坐标(Xw, Yw, Zw):
$$ \left(\begin{array}{l} {X}_{{c}} \\ {Y}_{{c}} \\ {Z}_{{c}} \end{array}\right)=\left(\begin{array}{lll} {r}_{00} & {r}_{01} & {r}_{02} \\ {r}_{10} &{r}_{11} & {r}_{12} \\ {r}_{20} & {r}_{21} & {r}_{22} \end{array}\right)\left(\begin{array}{l} {X}_{{w}} \\ {Y}_{{w}} \\ {Z}_{{w}} \end{array}\right)+\left(\begin{array}{l} {T}_{{x}} \\ {T}_{{y}} \\ {T}_{{z}} \end{array}\right)$$ (7) 其中,r00~r22分别表示绕x轴、y轴和z轴旋转,Tx、Ty和Tz表示绕x轴、y轴和z轴平移。
5 测试与结果分析
为验证接触网检测系统的精确性,在实验室搭建整套系统和标定平台,通过比较人工实际测量值和系统测量值的方式验证。此外,在北京地铁某线路上进行了动态测试。
5.1 实验室测试
5.1.1 实验室测试平台的建立
参照接触网检测系统在检测车上的安装位置,在实验室安装接触网图像采集装置和车体偏移图像采集装置,搭建接触网测试平台,测量高度可覆盖0~
6500 mm,并配置高度6500 mm的导高测量纵向杆,以及若干带刻度的卷尺和标定杆。假定纵向杆中心线为拉出值基准点平面,平面左端为正拉出值,右边为负拉出值。5.1.2 导高和拉出值测试
(1)随机选定多个导高高度,能正常采集图像,且误差在指定范围内:导高测量范围在
4000 mm~4500 mm时,精度误差≤2 mm;导高测量范围在4500 mm~6000 mm时,精度误差≤5 mm。(2)随机选定多个拉出值,能正常采集图像,且测量误差在指定范围内:导高在
4000 mm~6000 mm,拉出值测量范围在[−400,400] mm范围时,精度误差≤5 mm。5.1.3 车体振动位移修正测试
模拟车体振动倾斜姿态,验证车体偏移测量装置的精确性。随机旋转、上下和左右改变平台坐标时,通过人工实际测得的坐标,与测量结果进行比较,精度误差≤0.6 mm。
5.2 线路动态测试
将接触网检测系统搭载在地铁列车上,在营运地铁线路接触网带电情况下随列车运行,验证系统是否符合设计要求。主要内容包括:
(1)在地铁列车运行过程中,系统能动态采集高质量的接触网和轨道图像及准确的公里标数据,实时计算接触网导高和拉出值测量数据;
(2)根据检测的接触网导高和拉出值 测量数据,分析接触网导高和拉出值测量数据是否符合设计要求,并给出相应评价。
5.3 测试结果分析
5.3.1 实验室导高和拉出值测试
在实验室随机选择接触网导高在
4000 mm、4383 mm、4800 mm、5800 mm和6000 mm不同的标定点位置进行多次导高测量,测量结果如表1所示。表 1 实验室导高测量测试数据表单位:mm 序号 人工实际测量的标定点导高 系统测量的标定点导高 误差 1 4000 4001.8 1.8 2 4383 4384.3 1.3 3 4800 4803.8 3.8 4 5800 5801.6 1.6 5 6000 6004.1 4.1 由表1可知,当测量范围在
4000 mm~4500 mm时,误差最大值为1.8 mm;当测量范围在4500 mm~6000 mm时,误差最大值为4.1 mm。在实验室随机选择导高在
4000 mm、4383 mm、4800 mm、5800 mm和6000 mm的标定点位置进行拉出值测量,测量结果如表2所示。表 2 实验室拉出值测量测试数据表单位:mm 序号 标定点导高 方向 人工实际测量的
拉出值数据系统测量的
拉出值数据误差 1 4385 左 12.0 12.9 2.4 2 4385 左 133.5 135.4 1.9 3 4385 右 350.5 −354.5 4.0 4 6000 右 100 −103.8 3.8 5 6000 右 400 −404.8 4.8 由表2可知,当导高测量范围在
4000 mm~4500 mm,拉出值测量范围在[−350,350] mm时,误差最大值为4.0 mm;当导高测量范围在4500 mm~6000 mm,拉出值测量范围在[−400,400] mm时,误差最大值为4.8 mm。5.3.2 实验室车体振动模拟偏移修正测试
通过接触网图像采集装置、车体偏移图像采集装置的旋转、俯仰和水平移动,模拟检测车途径弯道、坡道等路段时的车体振动情况。在初始标定时,让车顶平面和轨道平面形成平行关系,车顶中心线和轨道中心线的连线在车顶或者轨道平面的垂直平分线上。当发生震动时,车顶平面和轨道平面的相对关系将会变化,特别是车体的横向移动,对即拉出值影响最大。通过测量横滚角、左右偏移量和上下偏移量,即可计算出修正值。
在实验室模拟车体不同运动状态下,车体偏移测量装置部分测量结果如表3所示。
表 3 实验室车体振动模拟实验中车体偏移测量装置测试数据表序 号 运动方向($ \mathit{\theta } $,a,b) 左轨初始坐标(X,Y) 左轨计算坐标(X,Y) 右轨初始坐标(X,Y) 右轨计算坐标(X,Y) 1 逆时针$ 1^\circ $,右10,下10 (−572.5,−415) (−572.585,−415.338) (572.5,−415) ( 572.8595 ,−415.336)2 顺时针$ 1^\circ $,右10,下10 (−572.5,−415) (−572.253,−415.249) (572.5,−415) ( 573.0345 ,−415.254)3 逆时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.552,−415.112) (572.5,−415) ( 572.7951 ,−415.098)4 顺时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.438,−414.845) (572.5,−415) ( 572.8119 ,−414.851)5 逆时针$ 1^\circ $,左10,下10 (−572.5,−415) (−572.574,−415.168) (572.5,−415) ( 572.6453 ,−415.162)6 顺时针$ 1^\circ $,左10,下10 (−572.5,−415) (−572.743,−414.874) (572.5,−415) ( 572.6724 ,−414.877)7 逆时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.584,−414.88) (572.5,−415) ( 572.5346 ,−414.872)8 顺时针$ 1^\circ $,左10,上10 (−572.5,−415) (−572.748,−414.719) (572.5,−415) ( 572.3645 ,−414.727)由表3可知,顺/逆时针旋转1°、水平方向左/右移动10 mm、俯仰方向上/下移动10 mm范围内,接触网检测系统水平方向的测量误差最大不超过0.53 mm,上下方向测量误差最大不超过0.336 mm,精度误差均小于0.6 mm。
5.3.3 线路运行动态测试
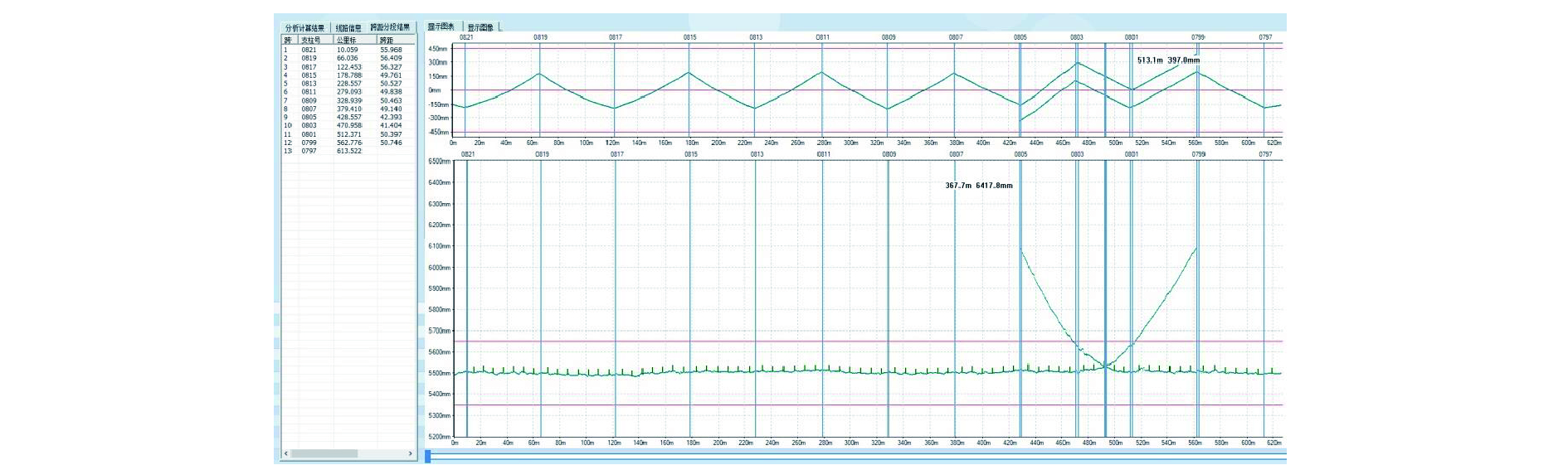
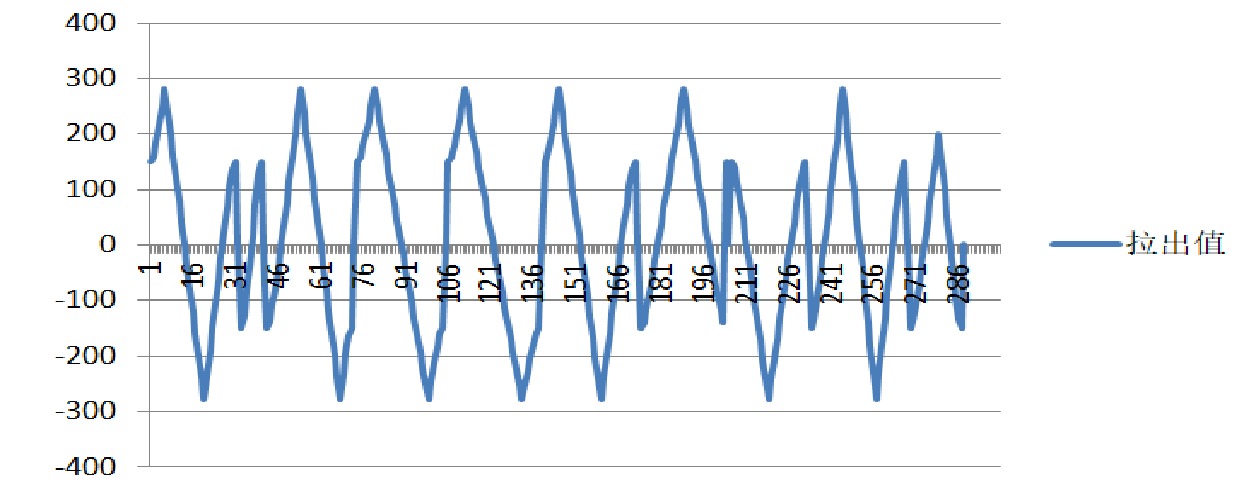
将接触网检测系统搭载在地铁列车上,在白天和夜晚分别进行多次动态检测。在列车运行过程中,接触网检测系统采集了大量接触网和铁轨原始图像,检测软件通过图像处理计算出接触网导高和拉出值测量数据,图9是该线路两个地铁站间接触网导高和拉出值实测数据的实时采集和显示图;图10是系统采集的支柱号0801~0805之间的接触网拉出值测试数据;图11是该地铁某两个车站之间接触网区间拉出值测试数据。
图9~11表明:该系统能够全天不间断动态采集接触网和铁轨图像、显示线路接触网导高和拉出值测量数据。当线路接触网站点间导高在
4500 mm~6000 mm范围内时,拉出值变动区间测试数据在[−400,400] mm范围内,导高和拉出值检测数据符合设计要求。6 结束语
接触网几何参数动态检测系统通过采集接触网和钢轨图像,利用图像处理技术,实时计算接触网导高、拉出值测量数据,利用安装在检测车车轴上增量式编码器产生的位移计数脉冲信号计算公里标,自动识别触网导高、拉出值异常,并生成指导接触网精调和维修所需的资料,支持检测过程数据回放、查询和标记。全套硬件设备总重不超过25 kg,安装简便,并提供有效的标定方法,确保测量精度。实验室测试和地铁营运线路动态测试结果表明,当搭载列车以0~120 km/h速度在区间运行时,该系统能够稳定地采集高清图像,导高、拉出值测量精度误差低于5 mm,能够满足铁路、地铁和轻轨等接触网新建施工精调作业及营运线路接触网日常巡检需求,有效提升接触网精调和巡检工作效率与质量。
下一步,将在阴雨、冰雪等各种天气、不同类型线路区段(弯道、坡道、轨道不平顺等)及不同运行速度条件下,开展更为充分的动态测试,根据测试结果分析存在的问题,对系统进行不断完善。
-
表 1 实验室导高测量测试数据表
单位:mm 序号 人工实际测量的标定点导高 系统测量的标定点导高 误差 1 4000 4001.8 1.8 2 4383 4384.3 1.3 3 4800 4803.8 3.8 4 5800 5801.6 1.6 5 6000 6004.1 4.1  下载: 导出CSV
下载: 导出CSV
表 2 实验室拉出值测量测试数据表
单位:mm 序号 标定点导高 方向 人工实际测量的
拉出值数据系统测量的
拉出值数据误差 1 4385 左 12.0 12.9 2.4 2 4385 左 133.5 135.4 1.9 3 4385 右 350.5 −354.5 4.0 4 6000 右 100 −103.8 3.8 5 6000 右 400 −404.8 4.8
下载: 导出CSV
表 3 实验室车体振动模拟实验中车体偏移测量装置测试数据表
序 号 运动方向($ \mathit{\theta } $,a,b) 左轨初始坐标(X,Y) 左轨计算坐标(X,Y) 右轨初始坐标(X,Y) 右轨计算坐标(X,Y) 1 逆时针$ 1^\circ $,右10,下10 (−572.5,−415) (−572.585,−415.338) (572.5,−415) ( 572.8595 ,−415.336)2 顺时针$ 1^\circ $,右10,下10 (−572.5,−415) (−572.253,−415.249) (572.5,−415) ( 573.0345 ,−415.254)3 逆时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.552,−415.112) (572.5,−415) ( 572.7951 ,−415.098)4 顺时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.438,−414.845) (572.5,−415) ( 572.8119 ,−414.851)5 逆时针$ 1^\circ $,左10,下10 (−572.5,−415) (−572.574,−415.168) (572.5,−415) ( 572.6453 ,−415.162)6 顺时针$ 1^\circ $,左10,下10 (−572.5,−415) (−572.743,−414.874) (572.5,−415) ( 572.6724 ,−414.877)7 逆时针$ 1^\circ $,右10,上10 (−572.5,−415) (−572.584,−414.88) (572.5,−415) ( 572.5346 ,−414.872)8 顺时针$ 1^\circ $,左10,上10 (−572.5,−415) (−572.748,−414.719) (572.5,−415) ( 572.3645 ,−414.727)
下载: 导出CSV
-
[1] 邢继军,张 曼. 一种受电弓与接触网的接触力检测方法[J]. 铁路计算机应用,2008,17(6):15-17. DOI: 10.3969/j.issn.1005-8451.2008.06.005 [2] 张 平,张建辉,李平芳. 高速铁路接触网安全巡检系统[J]. 铁路计算机应用,2016,25(3):34-36. DOI: 10.3969/j.issn.1005-8451.2016.03.010 [3] 乔凯庆,汪海瑛,王 婧,等. 基于6C系统大数据分析的接触网零部件缺陷特征研究[J]. 中国铁路,2023(7):39-44. [4] 张 毅. 深度学习在接触网定位器缺陷检测中的应用[J]. 铁路计算机应用,2018,27(3):15-19. DOI: 10.3969/j.issn.1005-8451.2018.03.004 [5] 曹春生,王文昊,谢大鹏,等. 基于图像识别的接触网安全巡检系统[J]. 铁路技术创新,2023(6):50-54. [6] 陈 兵,朱泳标,邹 杨,等. 三维地质模型在铁路勘察中的应用[J]. 铁路技术创新,2022(4):77-81. [7] 汤友福,朱 挺. 线阵列CCD摄像技术在铁路检测领域的应用[J]. 铁路计算机应用,2004,13(5):23-25. DOI: 10.3969/j.issn.1005-8451.2004.05.010 [8] 于秋波,倪国政,王志锐. 城轨交通接触网安全在线监测系统[J]. 中国铁路,2024(3):50-56.








计量
- 文章访问数: 39
- HTML全文浏览量: 29
- PDF下载量: 17
