

Fault identification method for vehicle suspension system based on CNN-LSTM
-
摘要: 高速铁路车辆(简称:车辆)运行条件恶劣多变,车辆悬挂系统的可靠性关系到行车安全和乘坐舒适性。当车辆的悬挂系统发生故障时,振动信号呈现非线性、非平稳的特征。为此,提出了一种基于卷积神经网络(CNN,Convolutional Neural Network)−长短时记忆(LSTM,Long Short-Term Memory)模型的车辆悬挂系统故障识别方法。通过SIMPACK平台建立了包含悬挂系统的车辆−轨道耦合动力学模型,获得了车辆系统各部件在健康状态及各类故障状态下的振动信号;以与故障元件关联部件的振动加速度信号作为模型输入,通过构建的CNN-LSTM模型对时序信号进行特征提取和分类预测,进而实现对车辆悬挂系统的故障识别;通过构建不同工况的故障数据集对该方法进行评估。试验结果表明,该方法在速度等级相同的情况下,故障识别准确率可达98%;在速度等级不同的情况下,故障识别准确率可达99%,验证了该方法的有效性。Abstract: The operating conditions of high-speed vehicles were harsh and changeable, and the reliability of suspension system was related to the safety and riding comfort of trains. When the suspension system of the high-speed vehicles fails, the vibration signal was non-linear and non-stationary. Therefore, this paper proposeded a fault identification method for vehicle suspension system based on Convolutional Neural Network (CNN) and Long Short-Term Memory (LSTM) model. The paper established a vehicle track coupling dynamic model with suspension system on the SIMPACK platform, and obtained vibration signals of various components of the vehicle system under healthy and various fault states, and took the vibration acceleration signal of the components associated with the faulty component as the input of the model, through the construction of a CNN-LSTM model, extracted features and predicted classification of time-series signals, thereby achieved fault recognition of the vehicle suspension system, evaluated the method by constructing fault datasets for different operating conditions. The experimental results showed that the fault recognition accuracy of the method can reach up to 98 % under the same speed level, and the fault recognition accuracy can reach up to 99 % under different speed levels, which verifies the effectiveness of the method.
-
高速铁路车辆(简称:车辆)运行在复杂多变的线路环境下,其行驶速度的提高伴随着激扰频带的加宽,使其悬挂系统的负担越来越大。随着车辆在轨运行时间的增长,其悬挂系统中的一些部件(螺旋弹簧、减振器、空气弹簧等)会产生一定程度的性能衰退,诱发诸如螺旋弹簧细微开裂、减振器轻微漏油/漏液、空气弹簧轻度漏气等早期故障,给行车安全带来潜在的危险[1]。因此,为保障车辆安全、稳定、可靠地运行,有必要对车辆悬挂系统早期故障进行及时诊断。
已有学者针对车辆悬挂系统故障对车辆动力学性能的影响进行了大量研究,研究结果表明,车辆悬挂系统早期故障的影响程度有限,人为进行故障判别较为困难[2-4]。此外,由于车辆悬挂系统模型的非线性,无法直接将故障类型与动力学性能表现联系起来,因此,有学者通过提取车辆动力学性能参数特征来进行悬挂系统故障识别。苏宇婷等人[5]通过提取车体加速度信号时频域特征,结合流形学习特征降维,成功实现了抗蛇行减振器故障、悬挂系统空气弹簧失气和横向减振器故障的识别;李晓[6]使用SIMPACK平台建立高速列车动力学模型,提取仿真得到的构架加速度信号的信息熵、信息㶲等特征,结合支持向量机(SVM ,Support Vector Machine)训练得到了故障识别及定位模型,实现了对空气弹簧、横向减振器等转向架关键部件的故障识别及定位;李昌喜[7]使用参数优化变分模态分解对转向架关键部件的故障振动信号进行预处理,提取最优分量的多尺度样本熵特征,构成特征向量,结合SVM实现了转向架关键部件故障识别;为弥补单通道输入故障特征有限的不足,刘佳龙[8]采用多通道特征向量作为输入,结合参数优化SVM,实现了高速列车转向架的故障诊断。
虽有不少学者结合人工智能提出较有效的车辆悬挂系统故障诊断模型,但是由于这些方法大多采用基于特征工程的数据驱动模型,较依赖专家知识。为此,本文提出一种结合卷积神经网络(CNN ,Convolutional Neural Network)和长短时记忆(LSTM ,Long Short Term Memory)模型的车辆悬挂系统故障识别方法,在不依赖人工经验的情况下实现端到端的智能故障识别。
1 相关技术
1.1 CNN
CNN是一种具有卷积结构的深度神经网络,它的基本结构包括输入层、卷积层、池化层、全连接层与输出层[9]。CNN中的数据处理主要分为过滤阶段和分类阶段。数据过滤阶段由卷积层和池化层完成,这一阶段的目的是特征学习和提取;数据分类阶段由全连接层完成,这一阶段的目的是数据对应类别判定。分类阶段的全连接层与输出层通常采用Softmax函数,用于计算多分类问题的概率输出。
1.2 LSTM模型
LSTM模型的基础结构是循环神经网络(RNN ,Recurrent Neural Network)模型,可解决RNN模型的长依赖问题[10]。由于时序数据的增多,RNN模型无法有效利用之前时刻的历史信息,导致发生梯度消失与梯度爆炸,即当网络层数增加、时间序列数据距离增大时,后面神经单元对前面神经单元的感知能力降低,导致遗忘前面信息的问题,无法有效利用历史信息。在RNN的基础上,LSTM模型通过增加新的记忆单元c,解决RNN模型存在的梯度消失与梯度爆炸问题,提高模型可靠性,同时,LSTM模型具有反馈结构,可在历史信息中挖掘数据的特征,擅于处理时序数据的预测问题。
LSTM模型由多个存储块组成,每个存储块都有遗忘门、输入门和输出门。所谓的“门”结构是一个全连接神经网络,使用Sigmoid函数作为激活函数,并输出0到1之间的值。可将存储块作为一个细胞,LSTM模型依赖于这些“门”,允许输入特征在每个时刻选择性地影响细胞状态,从而实现对当前时刻神经网络输出的控制。具体来讲,遗忘门决定细胞状态中哪些信息应该被删除,哪些信息应该被保留;输入门的作用是向细胞状态加入新内容;输出门的作用是从当前的细胞状态中选择有用信息并将其显示为输出。传统的LSTM模型的反向传播思路和RNN模型的反向传播思路一致,均采用梯度下降法对网络参数进行更新,主要步骤是对所有参数基于损失函数的偏导数进行计算。
2 车辆悬挂系统故障识别方法
2.1 CNN-LSTM模型
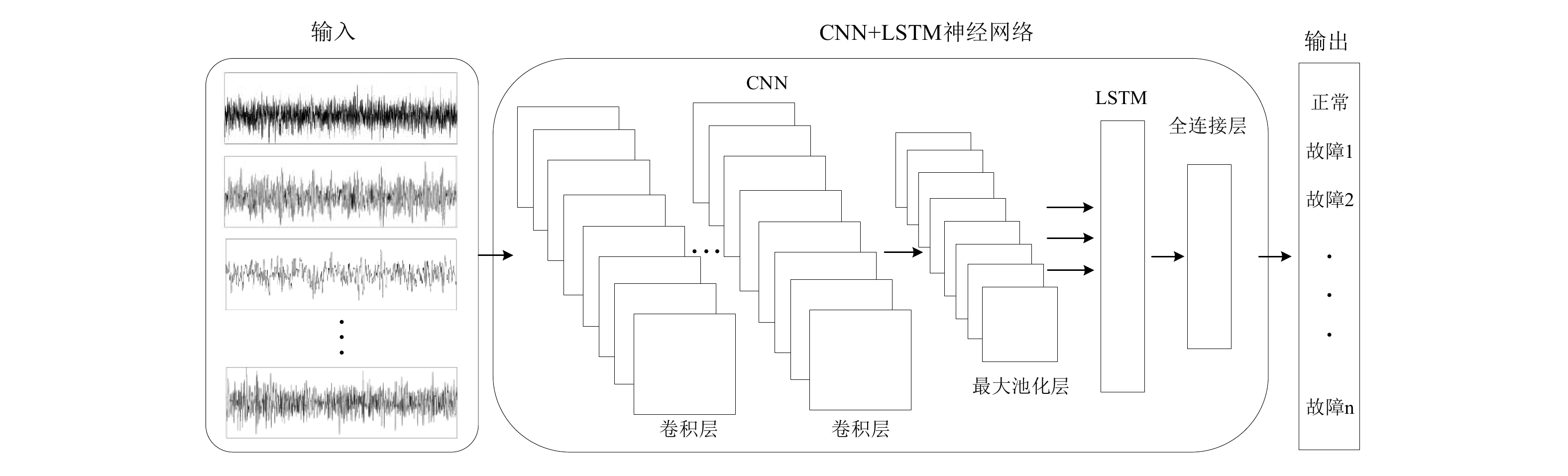
本文针对车辆悬挂系统的故障振动信号,设计一种CNN-LSTM模型,其模型架构如图1所示,具体参数设定如表1所示。该模型将CNN和LSTM模型结合成一个统一的网络结构,使之兼具CNN和LSTM模型的优势;利用3层卷积和1层池化结构来提取数据的空间特征,再采用1层LSTM模型提取数据的时间特征;采用全连接层对CNN和LSTM模型提取的局部时空特征进行全局学习;最后利用Softmax激活函数实现对不同故障的分类识别。
表 1 CNN-LSTM模型参数设定编号 网络层 卷积核大小 通道数 步长 网络层输出 1 卷积层1 3*1 16 1*1 16*300 2 卷积层2 3*1 32 1*1 32*300 3 卷积层3 3*1 64 1*1 64*300 4 池化层 3*1 64 2*2 64*150 5 LSTM - - - 128 6 全连接层1 - 64 - 64 7 全连接层2 - 3 - 3 2.2 方法流程
车辆悬挂系统故障识别模型的具体流程如下。
(1)数据采集:建立车辆−轨道耦合动力学数值仿真模型,并基于该动力学模型模拟不同工况下车辆悬挂系统故障,获取大量的悬挂元件故障数据。
(2)数据标准化:考虑到输入数据来自车辆的不同部件,应对数据进行标准化,将原始振动加速度信号进行标准差标准化,计算公式为
yi=xi−¯xs,¯x=1nn∑i=1xi,s=√1n−1n∑i−1(xi−¯x)2 (1) 式(1)中,
xi 是原始序列的 i 个数据点;yi 是经过标准化转换后的新序列的数据点;¯x 是原始序列的平均值;s 是原始序列的标准差;n 是原始序列的采样点数。经标准化后的新序列的平均值为0,标准差为1。(3)模型训练:通过数据采集获取的故障数据,训练CNN-LSTM模型,采用准确率(Accuracy)作为评价指标来考察模型的精度,计算公式为
Accuracy=1mm∑k=1I(f(xk)=yk) (2) 式(2)中,
f(xk) 是模型的预测值;yk 是模型的真实值;I 是判定预测值是否等于真实值的函数,若相等则函数值为1,否则为0。(4)预测评估:将标准化后的一维仿真振动信号输入到训练好的CNN-LSTM模型中,实现对车辆悬挂系统故障类型的识别,并用于指导车辆运行和维护。
3 试验搭建与结果分析
3.1 数据采集
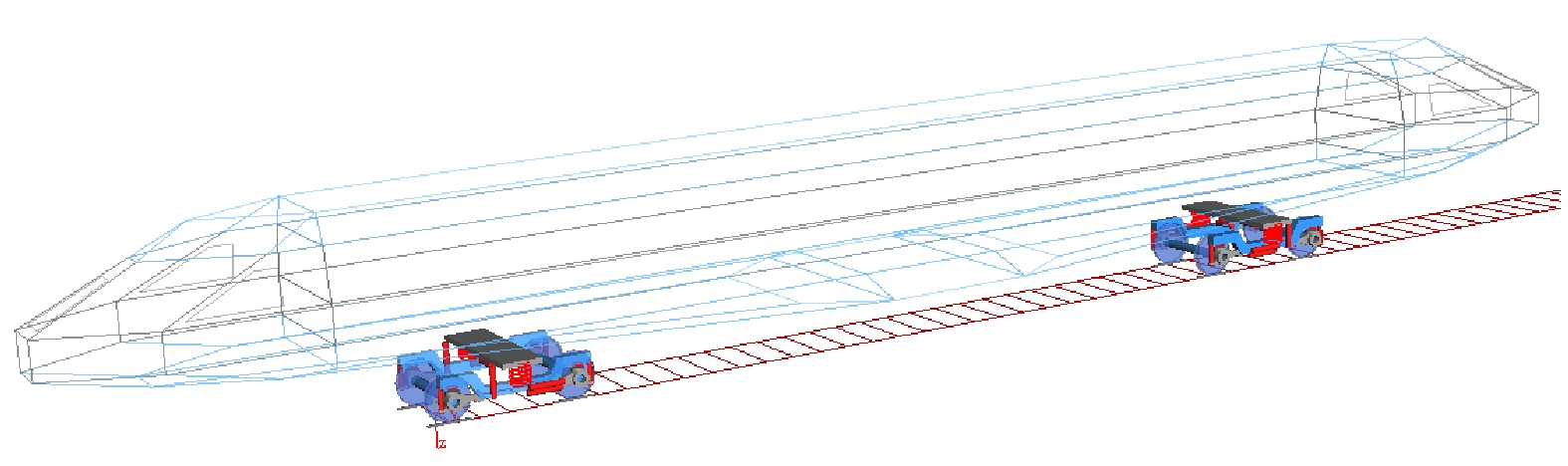
基于SIMPACK平台,建立CRH2型动车组的车辆−轨道耦合动力学模型,根据研究目的对其进行适当简化,将车体、构架、轮对等均视为刚体,忽略各部件的弹性变形,同时不考虑车辆牵引和制动2种运行工况。CRH2型动车组的车辆−轨道耦合动力学模型,如图2所示,由1个车体、2个构架、4个轮对、8个轴箱,共计15个刚体组成。振动加速度计安装位置,如图3所示,前、后构架均设置1个加速度计,收集构架横向和垂向加速度信号;分别在1位轴和4位轴每个轴箱处设置1个加速度计,收集轴箱横向和垂向加速度信号;在车体的前、后心盘处各设置一个加速度计,收集车体的三向加速度信号。
仿真试验共设置3种类型的车辆悬挂系统故障,分别为钢弹簧断裂、减振器漏油及空气弹簧失气。其中,钢弹簧为一系悬挂系统的元件之一,当弹簧外圈断裂时,由弹簧内圈提供承载作用;减振器包括一系垂向减振器、二系垂向减振器及二系横向减振器,当减振器漏油时,其阻尼接近完全失效;空气弹簧是二系悬挂系统的元件之一,当空气弹簧失气时,应急橡胶堆提供承载。因本文研究的是车辆悬挂系统早期故障诊断,因此,仿真时钢弹簧断裂故障程度设置为0.5,减振器故障设置为0.01。
3.2 试验搭建
训练数据来源于车辆轴箱、构架和车体上安装的加速度计收集到的振动加速度信号,采样频率为300 Hz。此外,基于车辆−轨道耦合动力学模型分别模拟在150 km/h、200 km/h和250 km/h 等3种不同恒定速度下的运行,仿真时间历程始终为50 s。将不同工况条件下每1 s的时间序列作为一个训练样本,并按照8∶2划分为训练数据集和测试数据集。使用交叉熵损失函数和Softmax分类器,超参数设置为:学习率为0.001,随机失活率为0.2。
3.3 试验结果分析
3.3.1 同一速度等级下车辆悬挂系统故障识别
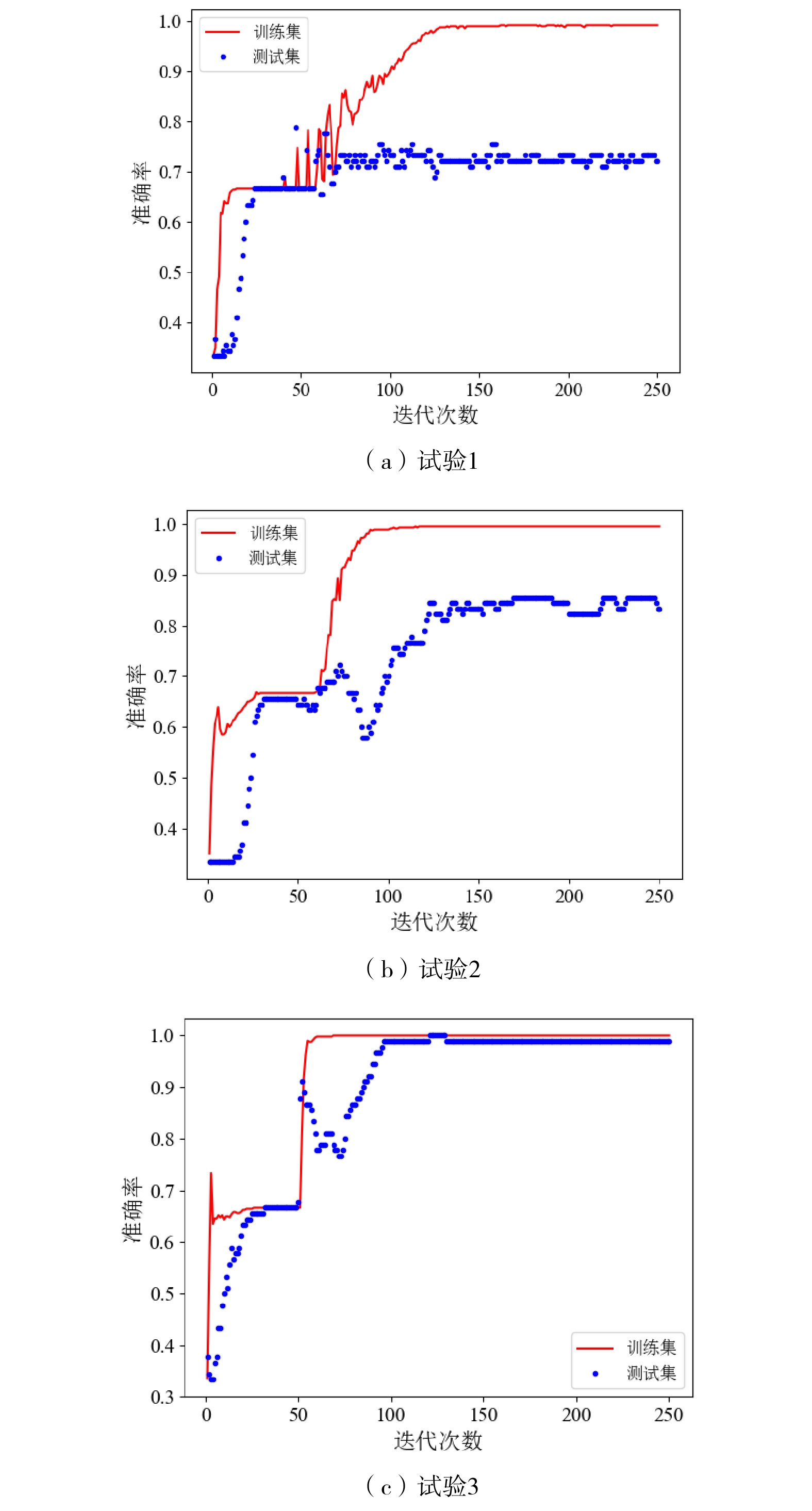
在200 km/h速度等级下对车辆悬挂系统进行3类试验。试验1:一系悬挂系统垂向故障训练识别,包括健康、钢弹簧故障和一系垂向减振器故障等3种状态;试验2:二系垂向悬挂系统故障训练识别,包括健康、空气弹簧故障和二系垂向减振器故障等3种状态;试验3:二系悬挂系统横向故障训练识别,包括健康、空气弹簧故障和二系横向减振器故障等3种状态。以上3类实验中,每类实验每种状态都包含160个训练样本和30个测试样本,训练样本数量共计480个,测试样本数量共计90个。
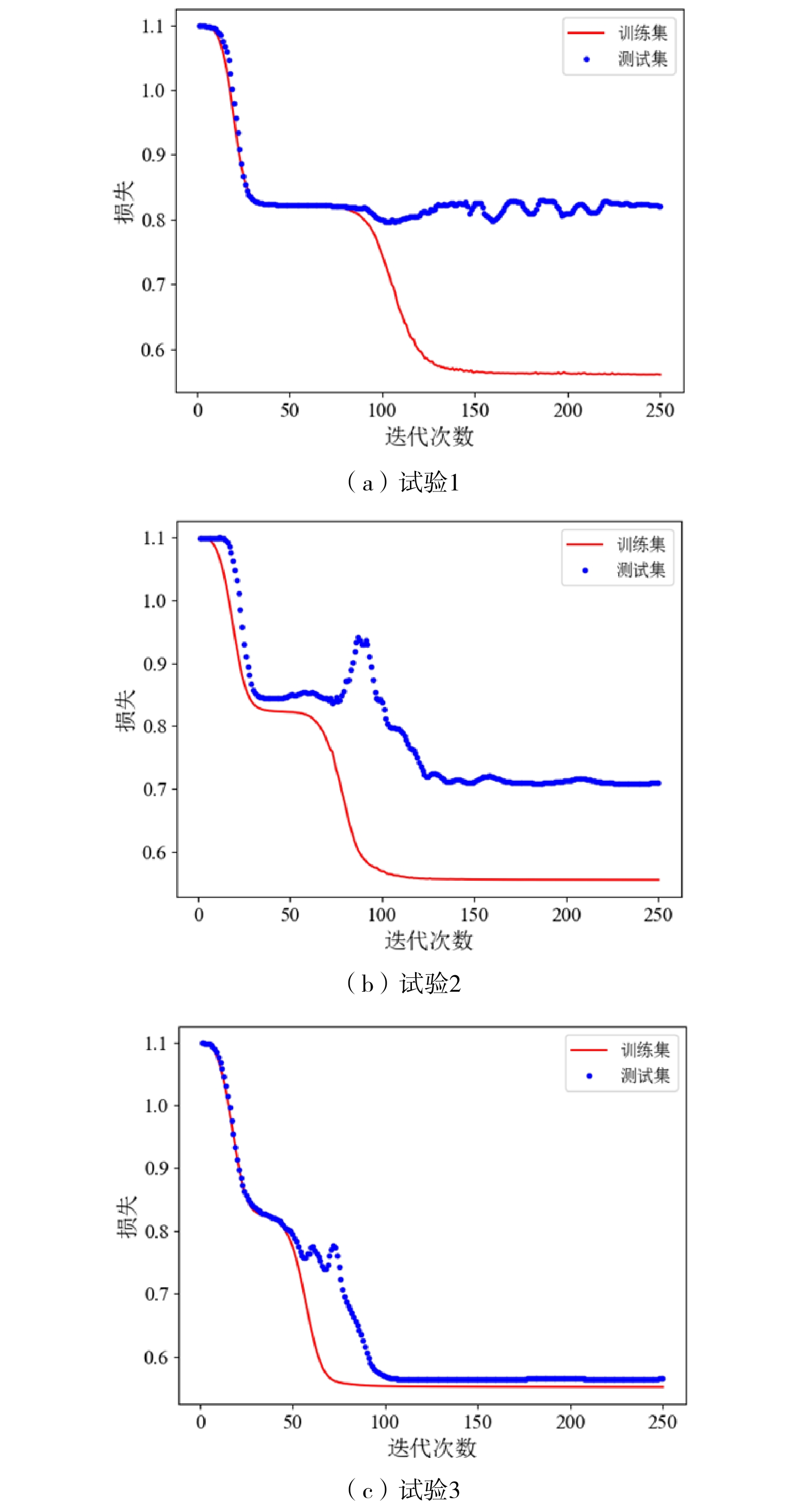
3类试验的分类准确率和损失函数如图4和图5所示。经过250次迭代计算后,试验1的故障识别准确率为73%,训练损失值为0.816;试验2的故障识别准确率为84%,训练损失为0.709;试验3的故障识别准确率明显提高,为98%,损失值也降至0.561。实验结果表明,本文的故障识别方法在同一速度等级下具有较高的准确率,能够有效地进行车辆悬挂系统故障诊断。其中,二系悬挂系统的故障识别准确率高于一系悬挂系统,造成这一现象的原因,主要是由于一系悬挂系统受力更加复杂,当一系悬挂系统发生故障时,故障信号更易被淹没。另外,车辆悬挂系统横向故障的识别准确率远高于垂向故障,主要原因在于横向故障时,对车辆构架横向振动影响较大,引起的信号波动更为明显。
3.3.2 不同速度等级下车辆悬挂系统故障识别
为进一步验证所提模型在不同速度等级下的有效性,考虑3种速度等级,进行以下实验。
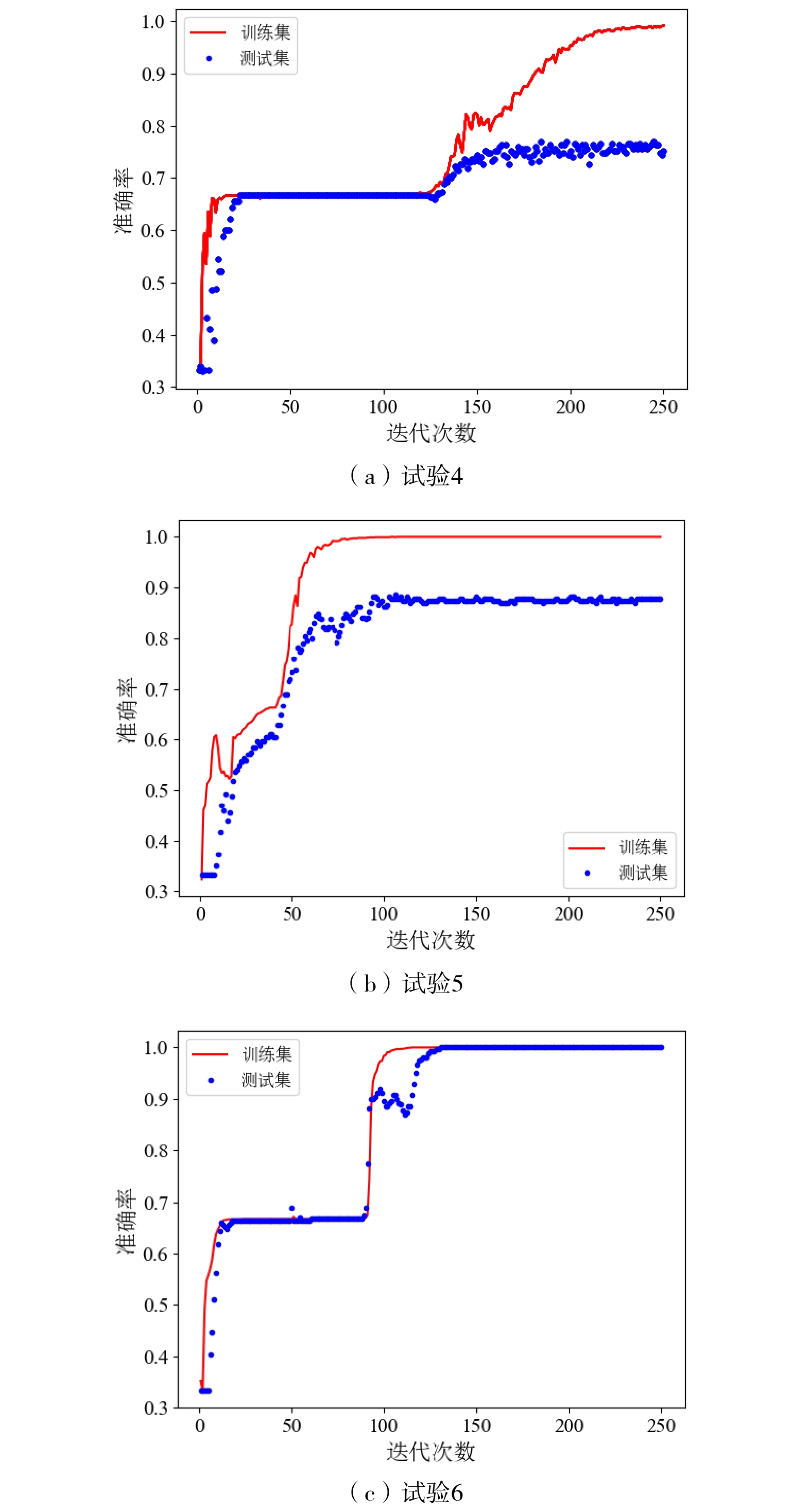
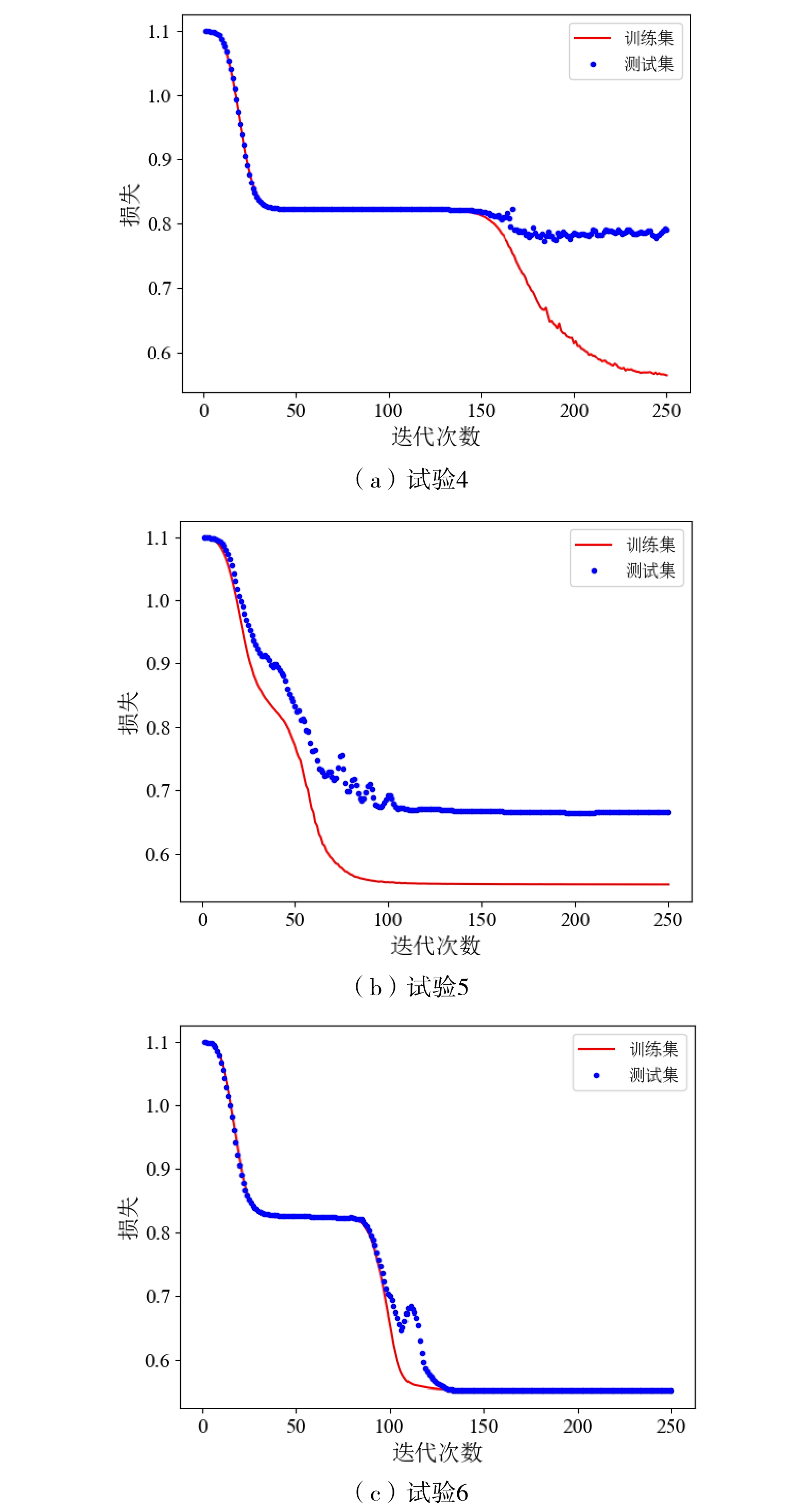
试验4:在150 km/h、200 km/h、250 km/h速度等级下进行一系悬挂系统垂向故障训练识别,分别选取健康、钢弹簧故障和一系垂向减振器故障等3种状态;试验5:在150 km/h、200 km/h、250 km/h速度等级下进行二系悬挂系统垂向故障训练识别,分别选取健康、空气弹簧故障和二系垂向减振器故障等3种状态;试验6:在150 km/h、200 km/h、250 km/h速度等级下进行二系悬挂系统横向故障训练识别,分别选取健康、空气弹簧故障和二系横向减振器故障等3种状态。以上3类试验,由于考虑了3种速度等级的情况,每类试验每种状态都包含160个训练样本和30个测试样本,训练样本数量共计1 440个,测试样本数量共计270个。
3类试验的分类准确率和损失函数如图6、图7所示,经过250次迭代计算后,在不同速度等级下,试验4的故障识别准确率为76%,训练损失为0.784;试验5的故障识别准确率为87%,训练损失为0.665;试验6的故障识别准确率为99%,损失值为0.575。试验结果表明,本文的故障识别方法针对不同速度等级下的车辆悬挂系统故障识别仍保持较高的准确率,具有良好的鲁棒性。
综上,相对于传统的主流方法,本文提出的方法基于原始数据驱动,不需要通过人工经验对数据进行特征提取,在简化诊断流程的基础上,仍能够保持较高的故障识别率,为车辆悬挂系统智能故障诊断的研究提供新的思路。
4 结束语
本文在建立了车辆−轨道耦合动力学模型的基础上,利用仿真数据提出了基于CNN-LSTM模型的车辆悬挂系统故障识别方法,结合了CNN和LSTM模型的优势,能够提取原始振动信号中的故障特征,有效减少人工特征提取过程中带来的不确定性。通过试验得出以下结论:
(1)在同一速度等级下,本文方法可直接从原始振动信号中识别故障类型,且准确率较高;
(2)在不同速度等级下,本文方法仍能保证较高的准确率,具有良好的鲁棒性。
(3)由于一系悬挂系统受力较复杂,二系悬挂系统的故障识别准确率一般高于一系悬挂系统。
-
表 1 CNN-LSTM模型参数设定
编号 网络层 卷积核大小 通道数 步长 网络层输出 1 卷积层1 3*1 16 1*1 16*300 2 卷积层2 3*1 32 1*1 32*300 3 卷积层3 3*1 64 1*1 64*300 4 池化层 3*1 64 2*2 64*150 5 LSTM - - - 128 6 全连接层1 - 64 - 64 7 全连接层2 - 3 - 3  下载: 导出CSV
下载: 导出CSV
-
[1] 郭凤林. 基于机器学习的高速列车减振器故障识别与预测方法研究[D]. 北京:北京交通大学,2021. [2] 潘彦君. 高速车辆空气弹簧悬挂系统动力学及故障影响分析[D]. 兰州:兰州交通大学,2021. [3] 刘泉龙. 高速动车悬挂系统的故障特征识别研究[D]. 成都:西南交通大学,2015. [4] 王晓樯. 动车组抗蛇行减振器故障诊断方法研究[D]. 北京:北京交通大学,2022. [5] 苏宇婷,姚 琦,王昌冬,等. 高速列车监测数据处理及故障诊断[J]. 铁道车辆,2022,60(1):16-22. [6] 李晓. 基于信息融合的高速列车转向架故障诊断[D]. 成都:西南交通大学,2015. [7] 李昌喜. 基于变分模态分解的高速列车转向架故障诊断[D]. 成都:西南交通大学,2018. [8] 刘佳龙. 基于数据驱动的高速列车转向架故障诊断与健康预测研究[D]. 沈阳:东北大学,2020. [9] Lawrence S, Giles C L, Tsoi A C, et al. Face recognition: a convolutional neural-network approach[J]. IEEE Transactions on Neural Networks, 1997, 8(1): 98-113. DOI: 10.1109/72.554195
[10] Cen J, Yang Z H, Liu X, et al. A review of data-driven machinery fault diagnosis using machine learning algorithms[J]. Journal of Vibration Engineering & Technologies, 2022, 10(7): 2481-2507.
-
期刊类型引用(0)
其他类型引用(6)










计量
- 文章访问数: 131
- HTML全文浏览量: 49
- PDF下载量: 49
- 被引次数: 6
