

Method for detecting water seepage on walls of traction substation
-
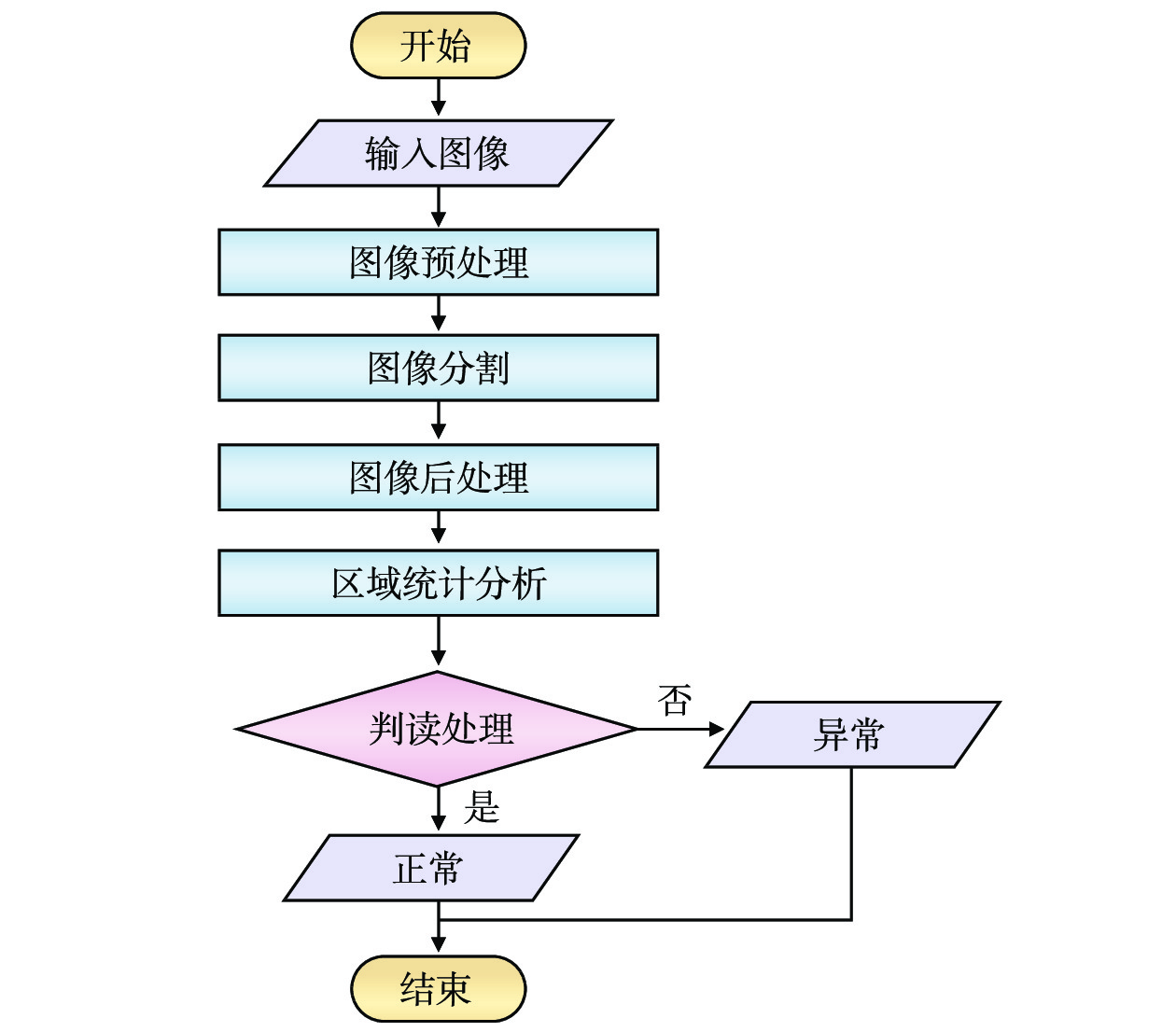
摘要: 针对牵引变电所墙壁渗水易影响列车的正常运营,且人工检查效率较低的问题,研究墙壁渗水检测方法。该方法基于改进的MobileNetV2网络和DeeplabV3网络相结合的模型进行设计,采用边缘计算和5G移动通信技术进行边缘化部署,实现了对牵引变电所墙壁渗水区域的精确分割,降低了模型的参数量,提升了模型的精确度,PA(Pixel Accuracy)和MIoU(Mean Intersection over Union)指标分别达到98.82%和95.32%;部署方案便捷,适用范围广,在2 T算力下,单帧执行时间仅为40 ms。
-
关键词:
- 墙壁渗水 /
- MobileNetV2 /
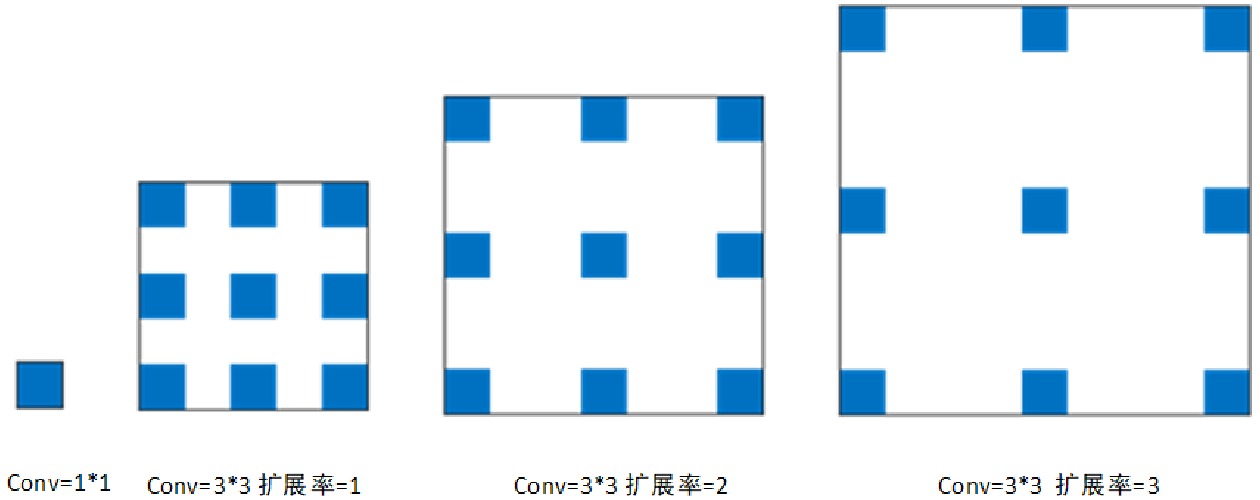
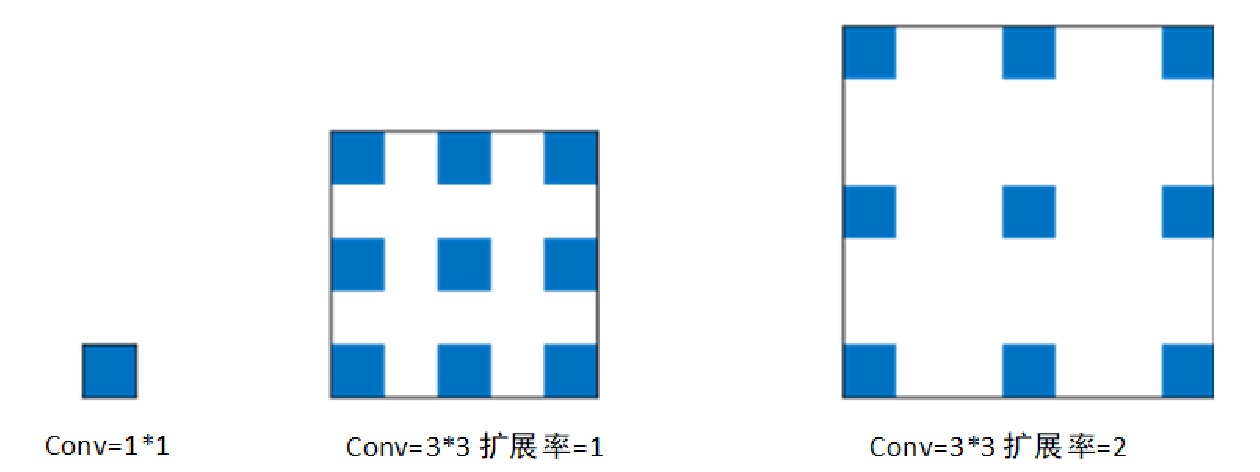
- DeeplabV3 /
- 牵引变电所 /
- 目标检测
Abstract: This paper focused on the problem of water seepage on the walls of traction substations, which could easily affect the normal operation of trains, and the low efficiency of manual inspection, studied a method for detecting water seepage on the walls. This method was designed based on the improved model combining MobileNetV2 network and DeeplabV3 network, used edge computing and 5G mobile communication technology for edge deployment. It was implemented accurate segmentation of the water seepage area on the wall of the traction substation, reduced the parameters of the model, and improved the accuracy of the model. PA (Pixel Accuracy) and MIoU (Mean Intersection over Union) indicators reach 98.82% and 95.32% respectively. The deployment plan is convenient and widely applicable, with a single frame execution time of only 40 ms under 2 T of computing power.-
Keywords:
- wall seepage /
- MobileNetV2 /
- DeeplabV3 /
- traction substation /
- object detection
-
-
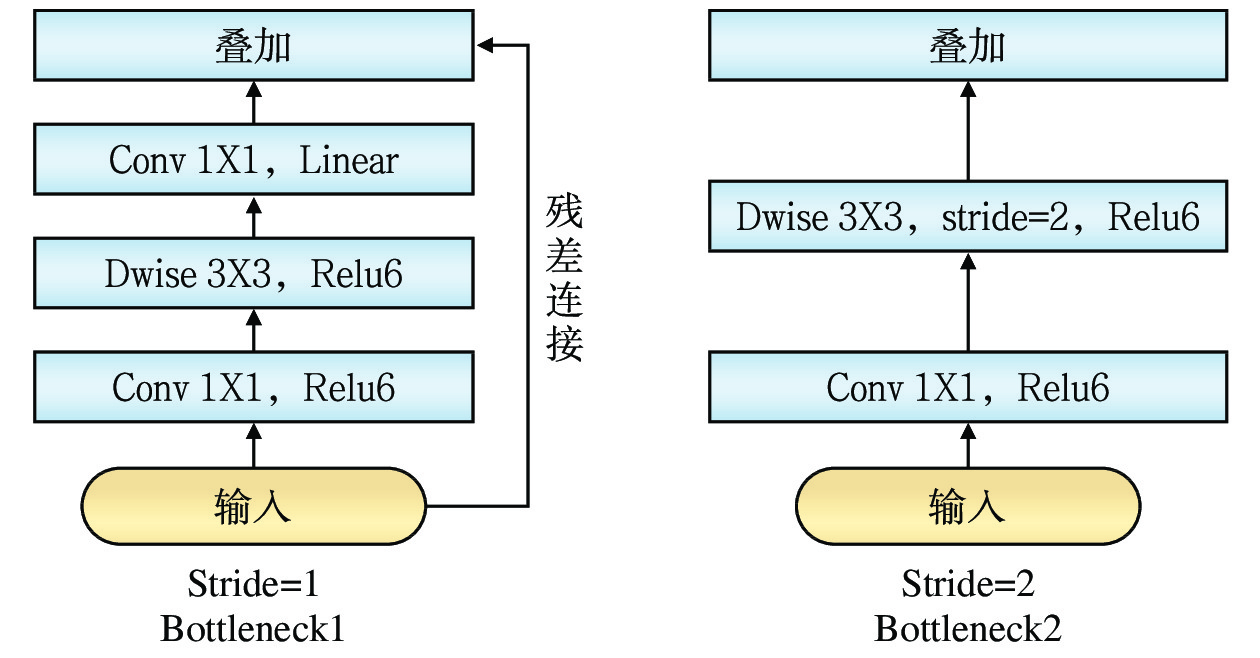
表 1 MobileNetV2网络构架
输入图像像素×通道数 操作 通道数 瓶颈层重复次数 步长 2242×3 Conv 32 1 2 1122×32 Bottleneck1 16 1 1 1122×16 Bottleneck2 24 2 2 562×24 Bottleneck2 32 3 2 282×32 Bottleneck2 64 4 2 142×64 Bottleneck1 96 3 1 142×96 Bottleneck2 160 3 2 72×160 Bottleneck1 320 1 1  下载: 导出CSV
下载: 导出CSV
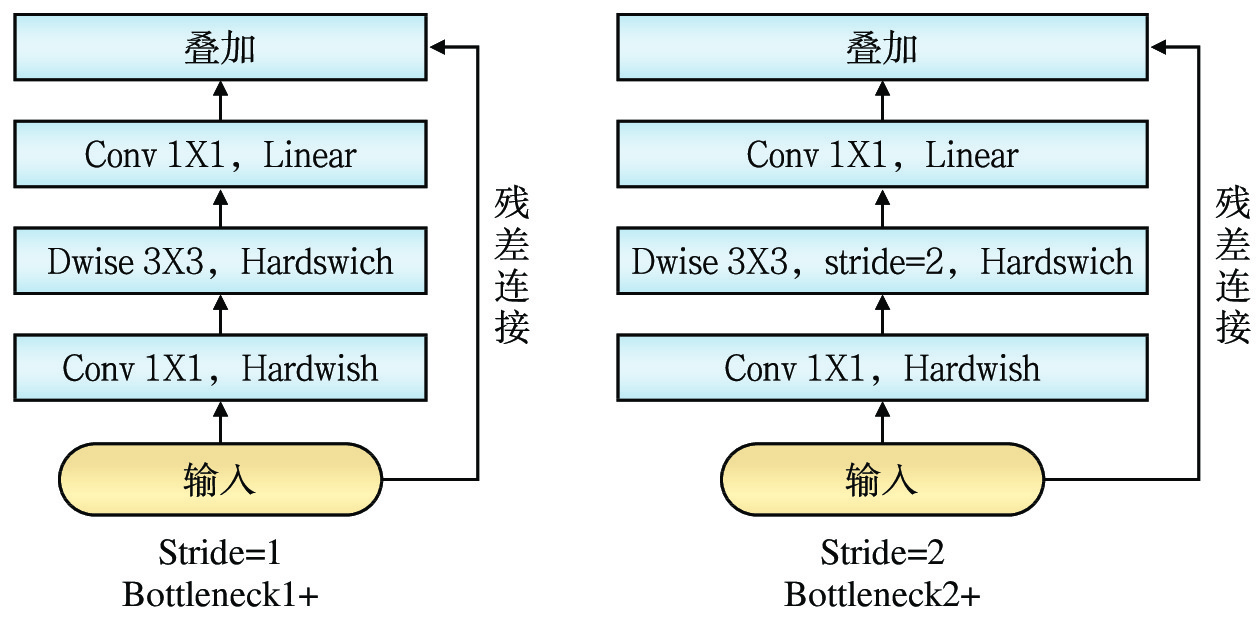
表 2 改进后的MobileNetV2网络构架
输入图像像素×通道数 操作 通道数 瓶颈层重复次数 步长 2242×3 Conv 16 1 2 1122×16 Bottleneck1+ 32 1 1 1122×32 Bottleneck2+ 32 2 2 562×32 Bottleneck2+ 64 2 2 282×64 Bottleneck2+ 64 2 2 142×64 Bottleneck1+ 96 1 1 142×96 Bottleneck2+ 128 1 2 72×128 Bottleneck2+ 128 1 1
下载: 导出CSV
表 3 各类模型的训练结果
模型 特征提取网络 像素分类器 损失类型 PA MIoU 耗时/ms 1 MobileNetV2 DeeplabV3 loss 95.55% 92.15% 82 2 MobileNetV2 改进的DeeplabV3 loss 97.04% 93.24% 83 3 改进的MobileNetV2 DeeplabV3 loss 96.23% 92.85% 60 4 改进的MobileNetV2 改进的DeeplabV3 loss 97.53% 93.54% 41 5 改进的MobileNetV2 改进的DeeplabV3 F_loss 98.82% 95.32% 40
下载: 导出CSV
-
[1] 谭秀炳. 交流电气化铁道牵引供电系统[M]. 5版. 成都:西南交通大学出版社,2021:16-20. [2] 贾东峰,张伟平,刘燕萍. 多尺度空间下的隧道裂缝与渗水区域检测[J]. 同济大学学报(自然科学版),2019,47(12):1825-1830. [3] 田 伟,姜泽界,郭志鹏. 基于机器视觉深度学习的电站渗水检测识别技术研究[J]. 电子设计工程,2020,28(20):66-70. DOI: 10.14022/j.issn1674-6236.2020.20.014 [4] 郑丽琼. 基于叩诊法MFCC声音特征的混凝土渗水检测研究[D]. 大连:大连理工大学,2020. [5] Sandler M, Howard A, Zhu M L, et al. MobileNetV2: Inverted residuals and linear bottlenecks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 18-23 June, 2018, Salt Lake City, UT, USA. New York, USA: IEEE, 2018: 4510-4520.
[6] He K M, Zhang X Y. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 27-30 June, 2016, Las Vegas, NV, USA. New York, USA: IEEE, 2016: 770-778.
[7] Howard A, Sandler M, Chu G, et al. Searching for MobileNetV3[C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV), 27 October, 2019-02 November, 2019, Seoul, Korea (South). New York, USA: IEEE, 2019: 1314-1324.
[8] Chen L C, Papandreou G, Schroff F. Rethinking atrous convolution for semantic image DeeplabV4mentation[C]//International Conference on Computer Vision and Pattern Recogintion (CVPR), 2017.
[9] Lin T Y, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]//2017 IEEE International Conference on Computer Vision (ICCV), 22-29 October, 2017, Venice, Italy. New York, USA: IEEE, 2018: 2999-3007.
-
期刊类型引用(1)
1. 刘爱群,于健,王瑞,陈广泰,杜海宾. 基于Git技术的机车车载应用软件集中控制系统研究. 铁道运输与经济. 2022(02): 52-58 .  百度学术
百度学术
其他类型引用(0)

计量
- 文章访问数: 41
- HTML全文浏览量: 16
- PDF下载量: 16
- 被引次数: 1
