

Preliminary study on multimodal journey planning based on MaaS + intelligent service platform of China railway ticketing and reservation system
-
摘要: 多模式行程规划是中国智能高速铁路2.0运营技术的重要组成部分,是促进客运服务高质量发展和多种交通融合发展的关键技术手段。文章借鉴国内外多种交通模式行程规划先进经验,结合铁路客票发售和预订系统(简称:铁路客票系统)在多式联运方面的实践,依托铁路客票系统出行即服务(MaaS,Mobility as a Service)+智能服务平台,提出多模式行程规划方法框架;该方法划分为数据收集、信息处理和行程优化3个阶段,充分利用各种交通模式已有的路径计算方案,实现多模式行程动态规划。后续将对该方法持续迭代优化,以生成精简、高效的多模式路径集合,使平台推荐的多模式路径方案更贴近旅客实际出行需求。
-
关键词:
- 铁路客票发售和预订系统 /
- 智能出行 /
- 出行即服务 /
- 行程规划 /
- 综合交通
Abstract: Multimodal journey planning is an important part of operation technologies for China's intelligent high-speed railway 2.0 , and is a key technical means to promote the high-quality development of passenger service and the integrated development of multimodal transportation. Based on the advanced experience of journey planning in multimodal transportation abroad, combined with the practices of China railway ticketing and reservation system in multimodal transport, this paper proposes the framework of multi-mode trip planning method based on the intelligent MaaS+ platform of the system, which is divided into three stages: data collection, data processing and journey optimization, and makes full use of the existing route calculation schemes of different transportations to realize dynamic multimodal journey planning. Subsequently, this method will continue to be iteratively optimized to generate a simple and efficient multi-mode path set so that the multi-mode path scheme recommended by the platform is more close to the actual travel needs of passengers. -
《国际交通百科全书》对出行即服务(MaaS,Mobility as a Service)的具体描述是:“用户可以通过互联网或者手机应用程序访问综合出行服务平台,在这里用户可以浏览信息、预定车票和支付,一站式完成购买出行产品或相关服务。这个综合出行服务平台不仅整合了多种模式的交通信息和支付方式,还整合了各种交通服务提供商的基础设施和运营模式”[1]。自2017年出行即服务白皮书[2]正式发表以来,大多数发达国家正在经历从个人拥有交通工具到综合交通服务消费模式的转变,尤其是欧盟成员国正在积极推进公共交通和私有交通深度融合,为旅客提供多种交通模式的便利出行服务。
我国国土面积大,人口众多,出行需求量大,铁路运营里程长,高速公路覆盖广,私人机动车保有量增大,共享服务模式逐渐被大众接受,城镇化率增高,城市交通拥堵及由此造成的环境问题日渐突出。在推进我国现代化进程中,铁路作为大众公共交通的主力,将以提升人民幸福感为使命,不断应用新技术持续推动铁路自我革新。王同军阐明中国智能高速铁路2.0的内涵,明确提出铁路全领域智能化重点攻关任务和实施路径,其中在智能运营方面,实现多种交通方式深度融合的MaaS+全行程智能服务,重点研究实现全程畅行规划、车站数字化接驳引导、车上旅客智能交互等方面[3]。
本文概括国内外关于多种交通模式行程规划的研究现状,总结铁路客票系统对多式联运的支持及发展规划,结合中国智能高速铁路2.0架构,提出基于铁路客票系统MaaS+智能服务平台的多模式行程规划方法框架,针对多模式行程规划的主要难题,初步探讨亟待深入研究的关键技术。
1 相关研究综述
目前,国内已开展了不少MaaS相关研究工作。刘向龙等人结合我国基本国情和交通运输业发展现状,分析MaaS与传统运输模式的差异,提出由旅客、交通运营商、数据提供商、MaaS服务商和政府部门组成的出行服务体系框架,并分4个阶段来发展我国MaaS出行服务体系[4];李卫波提出抓住疫情防控策略调整和扩大内需战略机遇,积极部署和推动出行即服务模式的发展,构建统一的全国城市出行即服务平台,由一家国有企业背景的运输一体化服务平台机构作为经营主体,发挥好“搭台子”作用[5];汪健雄等人基于中国铁路客票发售和预订系统(简称:铁路客票系统)的特点和联程联运业务发展现状,设计了铁路客票系统MaaS+智能服务平台,该平台面向多种交通模式提供智能票务、管理、营销等功能,以实现多种交通模式的无缝衔接,为一体化客运服务提供支撑[6]。
随着各国对MaaS概念的接受和实践推进,面向MaaS的多模式行程规划研究不断增多。Aditjandra研究面向MaaS的多模式行程规划的挑战与难点,对世界各国的多模式行程规划系统进行比较研究,例如:所覆盖的交通模式、提供给用户的信息、覆盖的面积、信息展示、行程计算的方法,重点对欧盟主要国家现行的行程规划系统进行分析,研究认为多模式行程规划应以地图展示平台为核心,整合智能卡技术、实时交通数据、模式智能决策、环境因素和费用计算支付等环节[7];Georgakis等人设计了启发式多模式行程规划方法,将其应用于MaaS4EU项目,在英国曼彻斯特和匈牙利布达佩斯2座城市进行试点应用[8];Dimokas等人开发了一款智能手机应用程序,实现公共交通与共享汽车相结合的多模式行程规划方案,并在欧洲的爱丁堡、提契诺州、布鲁塞尔等城市或地区得以应用[9];Liebig等人提出了一个动态规划路线系统,利用传感器采集的数据进行交通流量预测,同时对传感器覆盖稀疏的区域利用高斯过程回归方法进行交通流量预测,将预测结果用于指导路线规划,并在都柏林市进行试验验证[10]。
国内对单一交通模式内的路线规划问题已有较为深入的研究,例如:在铁路行程规方面,郭根材等人[11]、张霞等人[12]、于澎等人[13]分别利用帕累托最优原理、弗洛伊德算法、人工神经网络进行旅客中转换乘方案的计算。但在面向MaaS的多模式行程规划方面,相关研究尚处于起步阶段,关于多模式交通行程规划研究的文献资料较少。
2 铁路客票系统对多式联运的支持
2.1 多式联运现状
我国铁路在多种交通模式融合发展方面已进行了不少实践,尤其是在联程联运票务服务方面已取得实质性进展。自2012年以来,我国铁路先后与东方航空、春秋航空、中国民用航空局合作,在铁路12306互联网售票系统(简称:12306) App上推出空铁联运产品,提供旅客“一站式”购买高速铁路(简称:高铁)、飞机票。2021年,结合琼州海峡铁路轮渡业务优化项目,推出公铁海联运产品,使旅客能够在12306 App上购买来往海南的铁水联运票,实现火车、轮渡、巴士之间无缝换乘。目前,12306 App已实现一些联运行程规划功能,主要是展示出发地、中转地和目的地之间的高铁车次与飞机航班时刻信息,自动计算所需中转时间,基于旅客已选择的第一段行程,对第二段行程进行筛选,且以旅客选择为主,智能推荐行程为辅。所使用的多模式交通信息主要来自运输服务商提供的时刻表信息,尚未结合航班正晚点率、天气等变动因素,且行程信息展示也没有结合电子地图,对旅客缺乏吸引力和互动性。
2.2 发展规划
关于多模式行程规划的未来发展规划,单杏花、朱建军等人提出构建多式联运“一张票”,以二维码为主、多种载体为辅,建立统一的旅客实名制应用账户体系,实现民航、铁路、城市公共交通、轨道交通、 接驳巴士等交通方式的安全无缝对接,实现兼容的电子客票互认与鉴权机制的综合交通一体化平台。该平台以满足旅客出行需求为目标,将基于运力资源调控生成的静态方案与基于实时交通数据生成的动态方案相结合,应用综合交通大数据实现多模式行程路线设计与推荐[14]。
3 多模式行程规划方法框架
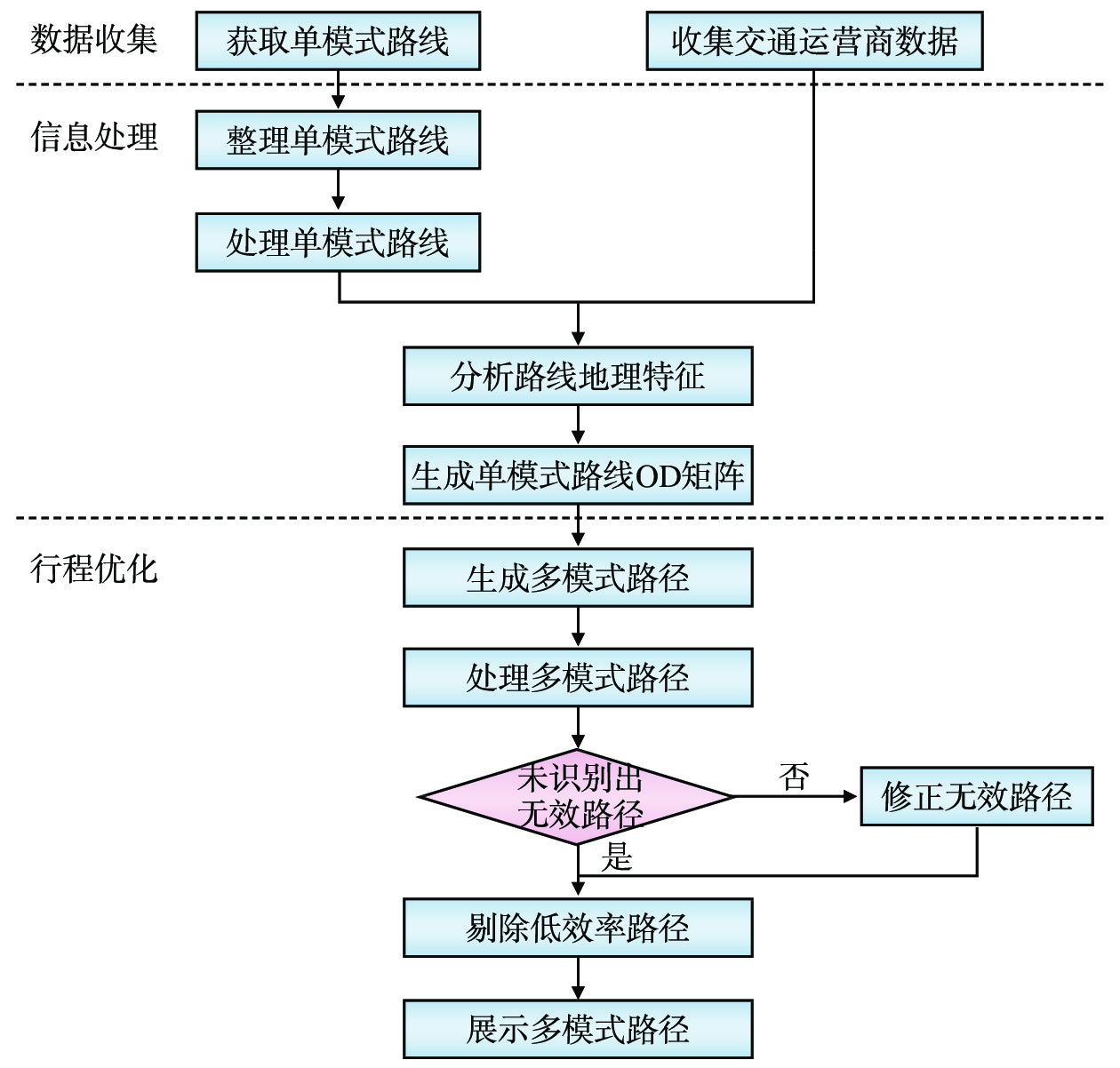
为多式联运提供全程畅行规划,以铁路客票系统MaaS+智能服务平台为基础,充分利用铁路客运服务大数据,整合民航、城市公共交通、轨道交通、租车、共享单车等绿色交通模式的相关数据,实现多种交通模式智能行程规划,并以直观易懂的电子地图形式向旅客展示所规划的行程路径。本文设计的多模式行程规划方法主要划分为数据收集、信息处理和行程优化3个阶段,基本流程如图1所示。
3.1 数据收集阶段
这一阶段包括获取单模式路线、收集交通运营商数据2个主要步骤。
(1) 获取单模式路线:通过请求运输服务商、第三方开放服务接口,获得多种交通模式的路线数据,包括公共交通、火车、飞机、自驾车等各种交通方式的路线数据。通过调用铁路客票系统MaaS接口,获得任意两地间车次时刻、票价、余票等数据;通过调用航空提供商专用接口,获得航班时刻、正点率、票价等数据;通过调用市政交通平台接口,获得地铁和公交的发车时刻、运行运行状态等数据;通过调用地图服务接口、约车平台服务接口,获得驾车行驶路线、道路拥堵度、车费等数据。
这种数据收集方式的好处是,既可以充分利用各种交通模式已有的路径计算解决方案,还能获取丰富的、实时更新的单模式路线数据,以便实现动态行程规划。
(2)收集交通运营商数据:利用铁路客票系统MaaS+智能服务平台,收集交通运营商提供的相关数据,包括铁路内/外部运输资源、信息资源及联程联运产品,以及各种交通模式运营动态(如服务时间、路线运营状态、拥堵指数等)和服务潜力信息。
3.2 信息处理阶段
这一阶段包括整理单模式路线、处理单模式路线、分析路线地理特征、生成单模式路线OD矩阵4个主要步骤。
(1)整理单模式路线:每个服务商或者第三方接口所提供的路线数据在内容、格式、单位等方面存在差异,为此需要对这些不同来源的路线数据进行规范化处理,将其转化为具有统一模式的路线数据。每一段单模式路线代表单种运输模式的路线,对应的路线数据除包含两点之间的交通方式、距离、时长等信息,还包括与下一段路线相连的换乘点信息,例如:旅客乘坐高铁到达车站后如何换乘公共交通的相关信息。对于火车、地铁、公交等带有停靠站信息的固定路线,无需进一步分解,由一条路线数据记录表示;而对于没有既定线路的交通方式,如驾车、骑车、步行等,可以进一步被分解为颗粒度更小的路线,由多条路线数据记录表示。
(2)处理单模式路线:在利用所有收集到的单模式路线进行行程规划之前,还需要对所有路线进行去重和排序处理。由于第(1)步调用不同服务接口获得的路线数据可能会存在重复,需要对所有路线数据进行对比检查,以剔除重复路线数据,消除数据冗余。同时,应用TOPSIS方法对路线进行多指标综合评价,生成路线排序,便于旅客依据不同规则对候选路线做出选择;采用TOPSIS方法进行路线排序,可以应用多种评价指标及灵活调整指标权重,如采用行程时长、换乘次数、到达时间、等候时长和步行距离作为评价指标,对应的权重分别选取0.25、0.2、0.2、0.15和0.2;此外,对于以高铁、飞机为主的路线,还可将票价作为一项额外的评价指标。
(3)分析路线地理特征:分析路线起点和终点的地理位置,对属性相似路线进行合并,减少后续步骤的计算量。分析路线起点和终点的地理位置,确定换乘点以及可换乘的交通工具,对路线的换乘点进行标识,例如:火车与地铁的换乘点、火车与公交的换乘点。
(4)生成单模式路线OD矩阵:调用私有化服务或开源路线计算引擎,计算生成从任意出发地出发、到达目的地的所需时间与距离,并表示为OD矩阵形式,其中行表示出发地,列表示目的地,单元的数值表示出发地至目的地的距离和旅行时间。
3.3 行程优化阶段
这一阶段包括生成多模式路径、处理多模式路径、判别无效路径、修正无效路径、剔除低效率路径、展示多模式路径6个主要步骤。
(1)生成多模式路径:以单模式路线数据为基础,一条多模式路径是由出发地到目的地之间、先后接续的多条单模式路线的一个组合。如图2所示,一条由出发地O至目的地D的多模式线路由L1(共享单车)、L2(共享单车)、L3(高铁)和 L4(出租车)4条单模式路线组成。
基于之前生成的单模式路线OD矩阵数据,采用启发式方法生成不同路径组合,每种路径组合为一个可选的规划方案。目前,生成路径组合的启发式方法已经有成熟经验[15],启发式方法将路径规划分解为不同的子任务,进行路径分段组合,还应考虑路线的性质以及前后两段路线连接点的空间位置因素,以提高路径组合的计算效率。
(2)处理多模式路径:对生成的所有多模式路径进行评估和排序,生成可向旅客推荐的路径列表;在评估多模式路径时,除了要考虑路径周边环境和旅客偏好等因素,还可考虑MaaS运营商的特定目标和偏好,例如:优先推荐高铁、地铁等交通方式;生成推荐路径列表后,为路径补充附加信息,例如依据运营商提供的实时数据,补充路径中各段路线的拥堵指数。
(3) 判别无效路径:多模式路径是由多条单模式路线组合而成的,整条路径应当具有合理、可行的时效性,不存在诸如单模式路线时间无法接续、换乘点等候时间占总耗时比例过大等情形的无效路径。逐一检查多模式路径的总耗时是否合理有效,据此判断是否为无效路径。
(4)修正无效路线:使用由铁路客票系统MaaS+智能服务平台实时获取的最新公共交通线路时刻表信息,对步骤(3)中检测出的无效路线进行修正,例如:依据交通运营商的实时数据对线路耗时进行校正。
(5)剔除低效率路径:尽管在之前的步骤中去除了部分路线或者路径组合,此时仍会存在低效率的路径。例如:在出发地和目的地非常接近的情况下,旅客从火车站步行不到1000 m即可到达公交乘车站,但系统可能会生成旅客使用共享单车来完成此段行程,让旅客先步行500 m或者更长距离到达共享单车停放点,骑行800 m到达距离公交车站最近的共享单车停放位置,最后再步行400 m到达公交车站。显而易见,系统所推荐的路线方案比旅客直接从火车站步行到公交车站的路线方案的效率要低得多。因此,设置一组规则来剔除这种低效率路径,确保系统生成的多模式路径方案对旅客具有现实意义。
(6)展示多模式路径:在智能服务平台中,将修正和精减后的多模式路径以电子地图形式进行展示,方便旅客直观查看系统推荐的可选行程路径;旅客还可以在电子地图上放大或缩小显示换乘点,进一步了解换乘方式等详细信息。
4 多模式行程规划的关键技术
4.1 多模式行程路径生成
多模式行程路径是由空间和时间上先后可接续、且符合旅客偏好设置的多条单模式路线组合而成。系统基于单模式路线OD矩阵直接推算生成的多模式规划路径集合往往基数较大,且未考虑旅客实际需求及个人偏好等因素,可能存在较多无效路径。
为此,根据旅客常规性出行特点,概括出主要交通工具及组合的典型应用场景,例如:绿色出行、乘坐舒适、时间短等特殊需求;将典型应用场景与启发式路径生成方法相结合,生成的多模式路径集合精简且高效,更贴近旅客实际出行需求。表1中列出旅客出行主要交通工具及组合的典型应用场景。
表 1 旅客出行主要交通工具及组合的典型应用场景交通工具及组合 应用场景 前提条件 共享单车 城市内短距离旅行,绿色出行 出发地和目的地附近有共享单车停放点,且均在运营商的运营范围内 共享单车-公共交通 旅行距离超出共享单车服务范围,绿色出行 出发地或目的地附近有共享单车停放点,且均在运营商的运营范围之外 自驾车或者网约车 城市群内旅行,中等距离,非绿色出行 公共交通之间无法衔接 自驾车(或网约车)-公共交通 城市群内旅行,中等距离 公共交通乘车站距离远 铁路或航空 长距离旅行 出发地和目的地与铁路或者航空客运站距离近 铁路(或航空)-公共交通 长距离旅行,绿色出行 铁路或者航空客运站与公共交通衔接 铁路(或航空)-自驾车(或网约车) 长距离旅行 无法换乘,或者旅客偏好 4.2 多模式路径有效性判别
多模式路径集合中存在着换乘地点不准确、路径总耗时不合理的路径,有必要对多模式路径的有效性进行判别。通过检查多模式路径集合中每一条路径的换乘点和总耗时,对这些无效路径进行修正,或从集合中删除。
以总耗时为例,当多模式路径中包含公共交通路线时,公共交通信息除了包含始发站、终点站之外,还有中间站信息,生成路径组合时,会生成中间站到终点站的路线子集,即公共交通线路的中间站可能已变为该线路的出发站,导致路径总耗时不合理。为此,计算多模式路径中每一段路线的耗时,并累加上换乘等候时间,按照以下规则判断多模式路径总耗时是否合理,若满足,则为不合理。
Rst+n∑i=1Lttn>Ldtn+1ORRst+n∑i=1Lttn+wt<Ldtn+1 其中,
R 是多模式路径;Rst 为开始时间;Lttn 为公共交通路段之前的各段路线的时间之和;Ldtn+1 为乘坐公共交通的开始时间;wt 为等候时间。(1)以公共交通换乘点为界,前段路径的结束时间超过公共交通的发车时间,此路径为无效路径;
(2)以公共交通换乘点为界,前段路径的结束时间累加上等候时间小于公共交通的发车时间,此路径为无效路径。
4.3 路径评估准则
旅客出行需求各自不同,通常会依据经济实惠、舒适便捷、个人偏好等因素选择到达目的地的路径以及乘坐的交通方式。平台应向旅客推荐快捷、高效的多模式规划路径,并方便旅客通过综合比对、评估、排序来选定最佳行程安排。为此,可为多模式路径添加若干效能属性,例如:换乘次数、步行时间、旅行总耗时、费用等,方便旅客依据多种不同评估准则来选取最适合个人出行需求的路径,例如:最短行程时间、最少步行时间、最少费用花销等。
此外,采用旅客认可度评估方法,让旅客填写调查问卷,对行程规划路径进行打分,利用旅客反馈信息对路径数据进行修正,使得系统生成的多模式行程规划路径更符合实际情况。
5 结束语
为推进多种交通模式深度融合,实现旅客出行全程智能服务,依托铁路客票系统MaaS+智能服务平台,提出多模式行程规划方法框架;通过外部接口获得单模式路线数据,通过智能服务平台获取交通运营商动态数据;对单模式路线数据进行规范化处理、去重排序、地理特征分析后,生成单模式路线OD矩阵;在此基础上,利用启发式方法生成多模式路径,并对多模式路径进行评估排序、无效判别和修正,以及低效路径剔除后,最终生成多模式路径推荐方案。该方法的实现有助于扩大铁路客票系统MaaS+智能服务平台在综合交通领域的影响力,加快我国出行即服务模式的发展,为综合交通出行一体化、智慧出行、客运服务高质量发展提供技术支撑。
本文提出的多模式行程规划方法尚有许多细节亟待深入研究,后续将对多模式行程规划方法持续迭代优化,将其尽快实现为铁路客票系统MaaS+智能服务平台的新功能。
-
表 1 旅客出行主要交通工具及组合的典型应用场景
交通工具及组合 应用场景 前提条件 共享单车 城市内短距离旅行,绿色出行 出发地和目的地附近有共享单车停放点,且均在运营商的运营范围内 共享单车-公共交通 旅行距离超出共享单车服务范围,绿色出行 出发地或目的地附近有共享单车停放点,且均在运营商的运营范围之外 自驾车或者网约车 城市群内旅行,中等距离,非绿色出行 公共交通之间无法衔接 自驾车(或网约车)-公共交通 城市群内旅行,中等距离 公共交通乘车站距离远 铁路或航空 长距离旅行 出发地和目的地与铁路或者航空客运站距离近 铁路(或航空)-公共交通 长距离旅行,绿色出行 铁路或者航空客运站与公共交通衔接 铁路(或航空)-自驾车(或网约车) 长距离旅行 无法换乘,或者旅客偏好  下载: 导出CSV
下载: 导出CSV
-
[1] Vickerman R. International encyclopedia of transportation[M]. Amsterdam: Elsevier, 2021.
[2] MaaS Alliance. White Paper, Guidelines & Recommendation to Create the Foundations for Thriving Maas Ecosystem[R]. Brussels: MaaS Alliance, 2017.
[3] 王同军. 中国智能高速铁路2.0的内涵特征、体系架构与实施路径 [J]. 铁路计算机应用,2022,31(7):1-9. [4] 刘向龙,刘好德,李香静,等. 中国出行即服务(MaaS)体系框架与发展路径研究 [J]. 交通运输研究,2019,5(3):1-9. [5] 李卫波. 扩大内需战略部署下推动“出行即服务”模式提级发展的一种新思路[J/OL]. 综合运输, (2023-03-30). https://kns.cnki.net/kns8/Detail?sfield=fn&QueryID=0&CurRec=1&recid=&FileName=YSZH20230327002&DbName=CAPJLAST&DbCode=CAPJ&yx=Y&pr=&URLID=11.1197.u.20230328.1126.004. [6] 汪健雄,张晨阳,肖玉兰,等. 铁路客票系统MaaS+智能服务体系研究 [J]. 铁路计算机应用,2022,31(7):69-74. [7] Aditjandra P. Review of international journey planning system to welcoming MaaS [J]. Advances in Transport Policy and Planning, 2019, 3: 29-47.
[8] Georgakis P, Almohammad A, Bothos E, et al. Heuristic-based journey planner for mobility as a service (MaaS) [J]. Sustainability, 2020, 12(23): 10140. DOI: 10.3390/su122310140
[9] Dimokas N, Kalogirou K, Spanidis P, et al. A mobile application for multimodal trip planning[C]// 2018 9th International Conference on Information, Intelligence, Systems and Applications (IISA), 23-25 July, 2018, Zakynthos, Greece. New York, USA: IEEE, 2018: 1-8.
[10] Liebig T, Piatkowski N, Bockermann C, et al. Dynamic route planning with real-time traffic predictions [J]. Information Systems, 2017, 64: 258-265. DOI: 10.1016/j.is.2016.01.007
[11] 郭根材,张军锋. 直达与换乘相结合的旅客行程规划模型与算法研究 [J]. 铁道运输与经济,2019,41(7):106-112. [12] 张 霞,单杏花,戴琳琳,等. 铁路客票快速经由算法的研究与实现 [J]. 铁路计算机应用,2018,27(12):23-26. [13] 于 澎,朱建生. 基于人工神经网络的铁路客票系统中转路径选取研究 [J]. 铁道运输与经济,2010,32(3):42-46. [14] 单杏花,朱建军,朱颖婷,等. 综合交通下的旅客多式联运智能出行研究 [J]. 铁路计算机应用,2019,28(12):1-4,9. [15] Manley E J, Orr S W, Cheng T. A heuristic model of bounded route choice in urban areas [J]. Transportation Research Part C:Emerging Technologies, 2015, 56: 195-209. DOI: 10.1016/j.trc.2015.03.020
-
期刊类型引用(1)
1. 李瑞,李平,侯日根,肖翔,李聪旭,邵赛. 面向京沪高铁智能化提升的模数一体化平台构建. 中国铁路. 2024(05): 33-40 .  百度学术
百度学术
其他类型引用(0)






计量
- 文章访问数: 113
- HTML全文浏览量: 22
- PDF下载量: 36
- 被引次数: 1
