

Analysis of high-speed adaptability and improvement scheme for CBTC system
-
摘要: 从车地无线通信、车载控制模型、轨旁设备应用等方面有针对性地研究了设计速度在160~200 km/h下基于通信的列车运行控制(CBTC,Communication Based Train Control)系统的高速适应性问题,提出了速度提升后CBTC系统相对应的改进方案。从理论上分析,传统CBTC系统在完成适配性改进后,能够满足此速度等级下安全运行的要求。
-
关键词:
- 基于通信的列车运行控制(CBTC) /
- 车地无线通信 /
- 安全控制模型 /
- 高速适应性 /
- 改进措施
Abstract: This paper focused on the high-speed adaptability of Communication Based Train Control (CBTC) systems designed for speeds ranging from 160 to 200 km/h in terms of vehicle-ground wireless communication, onboard control models, and trackside equipment applications, and proposed corresponding improvement scheme for the CBTC system after speed improvement. From a theoretical analysis, the traditional CBTC system can meet the requirements of safe operation at speeds of 160-200 km/h after completing adaptation improvements. -
随着我国城镇化水平持续提升,城镇间分工和协作联系也更加紧密,城市圈层已逐步形成,大量人口将不断在中心城区与近郊区、都市圈、城市群间流转。为更好地服务区域通勤、市域通勤、城际商务和机场专线等长距离客流群体,须借助符合高效、便捷、经济等功能特征的轨道交通运输系统[1]。
目前,我国已经确立了19个都市圈、城市群,这些都市圈、城市群的中心城内部已经具备了较为完善的城市轨道交通线网建设体系[2]。而针对城市外围日益增长的客流,首要任务就是应满足城市综合交通规划要求,即通勤交通出行时间不宜大于1 h。本文对国内部分已建和在建的高速度等级轨道交通线路情况进行了调研,结果如表1所示。
表 1 国内部分高速度等级轨道交通线路情况序号 线路 服务客群 速度等级
/(km·h−1)最小间隔
/min信号系统
选择互联互通
情况1 北京大兴机场线 机场客流 160 4 CBTC系统 雄安R1线 2 北京平谷线 市域通勤 160 2~2.5 CBTC系统 3 雄安R1线 机场客流、城际商务 160~200 2.5~3 CBTC系统 大兴机场线 4 郑州K2线 市域通勤、区域商务 160~200 2.5~3 CBTC系统/ CBTC+ CTCS-2兼容系统 5 上海机场联络线 机场客流、市域通勤 160 3 CTCS-2系统/CBTC+ CTCS-2兼容系统 嘉闵线、金山线 6 上海嘉闵线 市域通勤 160 3 CTCS-2系统 机场联络线 7 广州18号线 市域通勤 160 2.5~3 CBTC系统 8 深惠城际 城际商务 160~200 3 CTCS-2系统/CBTC+ CTCS-2兼容系统 注:基于通信的列车运行控制(CBTC,Communication Based Train Control)系统;中国列车运行控制系统2级(CTCS-2,Chinese Train Control System-2)。 由表1可知,为保证城市外围客流的时效性,打造“1小时通勤圈”,此类线路的最高设计速度一般在160~200 km/h范围内。为保证高峰时段便利性,其列车运行间隔要求在3 min左右。综合考虑城市轨道交通线网规划和线路定位情况,重点关注互联互通需求,可得出信号系统制式选型原则,即独立运行的轨道快线线路与城市轨道交通有跨线运行需求的轨道快线线路,其信号制式可采用基于通信的列车运行控制(CBTC,Communication Based Train Control)系统[2-5]。
CBTC系统能够支持城市轨道交通公交化运营和全自动运行;列车最小追踪间隔可达2 min;区间设备数量少,有利于降低长大区间运营维护工作量;可与城市中心同一制式线路互联互通,无缝链接城市—郊区廊道。目前,全球范围内CBTC系统的工程应用最高速度为160 km/h,160~200 km/h环境下尚无应用业绩。因此,探索CBTC系统在160~200 km/h速度等级下的适应性和系统改进方案,已经成为轨道快线线路的研究热点。
1 CBTC系统对于200 km/h的适应性分析
1.1 车地无线通信的高速适应性分析
近些年,国内大部分城市轨道交通线路均采用分时长期演进(TD-LTE,Time Division-Long Term Evolution)技术承载CBTC系统业务。测试发现,随着列车速度的提高,在越区切换和列车移动通过基站场景下,TD-LTE的通信性能逐步下降[6]。高速应用对TD-LTE性能的影响主要是由于传播时差等因素造成的多普勒频移累加,最终导致无线链路的不稳定,严重影响基站解调性能,引起传输性能指标恶化。多普勒频移计算公式为
fd=f/c⋅v⋅cosθ (1) 式中,
fd 为多普勒频移;f 为载波频率;c 为光速,c=3×108m/s ;v 为移动台的移动速度;θ 为移动台移动方向和入射波方向的夹角,若θ=0 ,则计算出的多普勒频移为最大多普勒频移。可以看出,移动速度与多普勒频移成正比,移动速度的不断提高将会引起多普勒频移的不断增大。国内城市轨道交通行业LTE一般采用1.8 GHz的专用频段,当列车运行速度为250 km/h时,可以计算出最大多普勒频移为417 Hz。然而,TD-LTE网络设计标准本身就是面向120~350 km/h的高速移动应用场景,其具备9级服务质量(QoS,Quality of Service)传输管理策略,可以保证最高优先级CBTC系统业务的可靠传输,采用频移校正措施后,能够保障高速移动场景下的无线链路质量[7]。1.2 车载控制系统的高速适应性分析
CBTC系统的车载控制是通过列车自动防护(ATP,Automatic Train Protection)设备实现的,其安全制动模型在确认列车速度限制时,是根据以下限制条件来计算的:列车运行区域的速度限制;列车运行区域内的所有临时限速;不同列车类型、型号或配置而采用的车辆速度限制等。
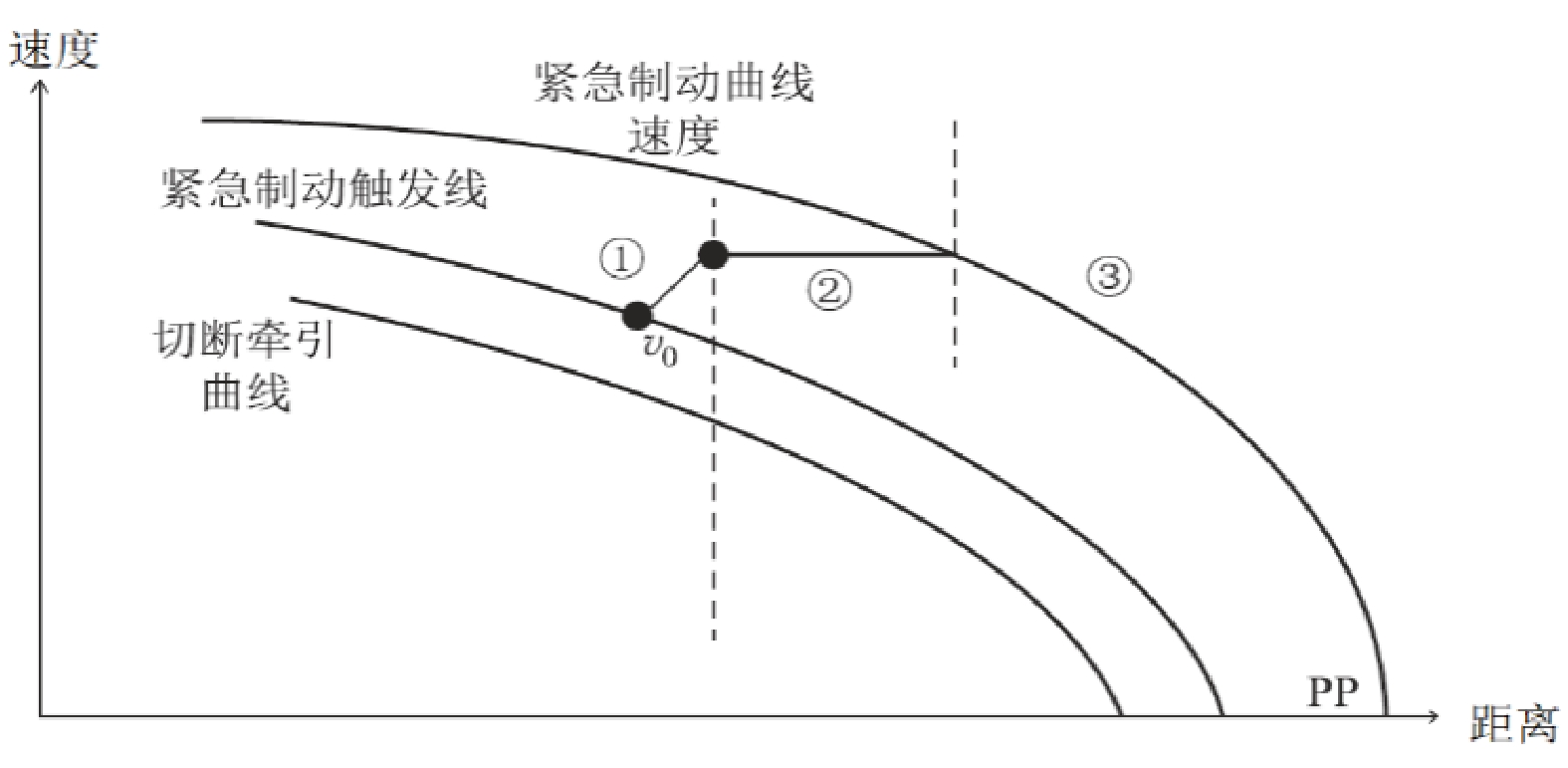
CBTC系统安全制动模型,如图1所示。列车紧急制动的过程分为3个阶段:
(1)列车在反应延迟时间内继续加速,紧急制动前CBTC系统有车载反应和牵引切断的时间延迟;
(2)牵引切断,列车在紧急制动建立等效时间内继续滑行,只有坡度加速度;
(3)实施紧急制动,平坦轨道上遵循速度–距离抛物线[8]。
从以上安全制动模型看出,列车控制能力与线路最高运行速度无关,仅与车辆的性能参数有关。
因此,线路最高运行速度的提升,从理论上分析不会影响安全制动模型,仅会因为车辆性能的变化而影响列车的紧急制动距离及常用制动距离。
1.3 轨旁设备的高速适应性分析
1.3.1 计轴设备
国内地铁列车车轮直径大部分都在800~900 mm之间,轴距在2 m以上,根据计轴检测与车轮轮径、轴距及车速间的对应关系可知,在满足列车相应的车轮直径及轴距的条件下,计轴设备适应速度最高可达到450 km/h。对国内主流产品及应用情况的调研结果,如表2所示。
表 2 国内部分厂家计轴情况序号 计轴设备型号 适应速度/(km·h−1) 业绩应用 线路 线路速度/
(km·h−1)1 提芬巴赫TAZ II/S295型 450 北京大兴机场线
广深线
沪昆线160
200
2002 福豪盛ACS2000型 450 3 微机系列JZ1-H型 450 渝利铁路 200 4 泰雷兹AzLM型 380/440(可选) 5 AzS(M)350U型 440 6 ARTJZ型 350 广州18号线 160 从表2可以看出,计轴设备从理论上分析完全能够满足160~200 km/h时速的运营需求。在城市轨道交通线路中,采用直流供电,计轴设备应用于直流供电环境。行走速度提升后,供电系统将采用交流电制式,在交流供电的电磁环境下,存在对计轴设备的电磁干扰问题,且缺乏160~200 km/h条件下的大规模应用业绩。
1.3.2 应答器
列车运行速度对应答器传输模块(BTM,Balise Transmission Module)作用时间、动态接收比、接收安全报文帧数等均有一定影响。当列车运行速度超过350 km/h时,应答器水平作用距离急速减小,车载误判风险增大[9]。但是,以目前国内常用的欧标应答器来计算,假设列车最高速度250 km/h,BTM正常解码时间为
t2=2.5ms ,若应答器出线尾缆方向垂直钢轨,天线与应答器水平作用距离为S=600mm ,设列车经过应答器时间为t1 ,那么经计算可得t1=s/v=8.64ms 。根据应答器解码次数的公式为N=t1/t2 (2) 计算可知,BTM以列车最高速度250 km/h通过应答器时,解码次数约为3.46次。正常情况下,BTM正确解码1次即可正常发送报文,那么3.46次完全能够满足系统正常应用。且铁路经过多年的实践证明,应答器能够较好地适应250 km/h速度等级线路的应用,而城市轨道交通中所应用的应答器硬件设备是与铁路完全相同的。
1.3.3 车载外围设备的高速适应性分析
对于车载外围的雷达和速度传感器设备,城市轨道交通中应用的与高速铁路中应用的都是同类型产品,雷达设备测速范围为0.2~600 km/h,速度传感器设备测速范围为0~380 km/h,完全能够满足列车最高速度200 km/h的运用要求。
2 160~200 km/h 速度下CBTC系统的改进方案
2.1 车地无线通信系统改进措施
车地无线通信的信号覆盖范围、通信延迟、地面无线切换的延迟、稳定性等均应满足承载CBTC系统业务的指标要求。在列车高速运行过程中产生的多普勒移频主要会引起的性能损失包括:随机接入信道(RACH,Random Access Channel)的性能损失,导致呼叫成功率降低;专用业务信道(DCH,Dedicated Channel)的性能损失,导致掉话率上升。为了尽可能地消除多普勒移频对通信的影响,可以采用以下措施。
2.1.1 AFC技术
在基站侧接收机采用自动频率控制(AFC,Automatic Frequency Control)技术进行频率纠偏。AFC通过快速测算高速带来的频率偏移,改善RACH信道的前导检测性能,增强RACH信道和DCH信道消息解调性能,从而补偿多普勒频移,解决高速移动下的接收机误码率升高问题。前文中已计算,在载频1.8 GHz、行驶速度250 km/h情况下,多普勒频移带来的频偏为417 Hz,经仿真验证,采用AFC技术后,RACH信道的性能损失<1 dB,而DCH信道的性能损失<0.2 dB,对城市轨道交通车地通信的性能影响很低,可以满足运营要求。
2.1.2 子载波间隔技术
目前,LTE-M采用15 kHz的子载波间隔,该间隔比行驶速度250 km/h情况下的多普勒频移417 Hz要大很多,所以采用15 kHz的子载波间隔也可减小多普勒频移对性能的影响。
2.1.3 传输媒介选型
在城市轨道交通全线使用漏泄电缆进行信号覆盖,漏泄电缆和车辆天线之间的位置关系基本不会因车辆的移动发生明显的变化,而且车辆移动的方向与漏泄电缆、车载天线的位置关系为90°。根据多普勒频移的计算公式,理论上,在采用漏缆覆盖时,车辆移动引起的频移基本为零,这样就有效地解决了这个问题。
2.2 车载系统改进方案
2.2.1 列车定位
对列车的精确测速定位是行车安全和效率的重要保证[10]。利用多传感器信息融合技术可以消除单一定位方式的累计误差和瞬时漂移等不稳定因素,有效地解决列车定位精度的问题。组合定位技术是利用全球定位系统(GPS,Global Positioning System)和北斗卫星导航系统(BDS,Beidou Navigation Satellite System)进行列车位置计算、利用速度传感器和雷达进行列车的速度计算,将这两个不同来源的结果进行滤波处理后,再次用地理信息系统(GIS,Geographic Information System)数据和应答器设备进行状态校正,通过将多种信息融合、相互补偿的原理,最终得到满足列车控制精度要求的列车位置输出信息。列车组合定位原理如图2所示。
随着列车运行速度的提高,会导致相同应答器报文延迟时间内列车最大运行距离的增加。因此,CBTC系统应考虑报文延迟时间内列车运行位置的变化,合理布置应答器位置,使其起到有效地补偿误差的作用,然后,将此变化纳入组合定位算法中,确保系统的精确测速及精确停车功能。
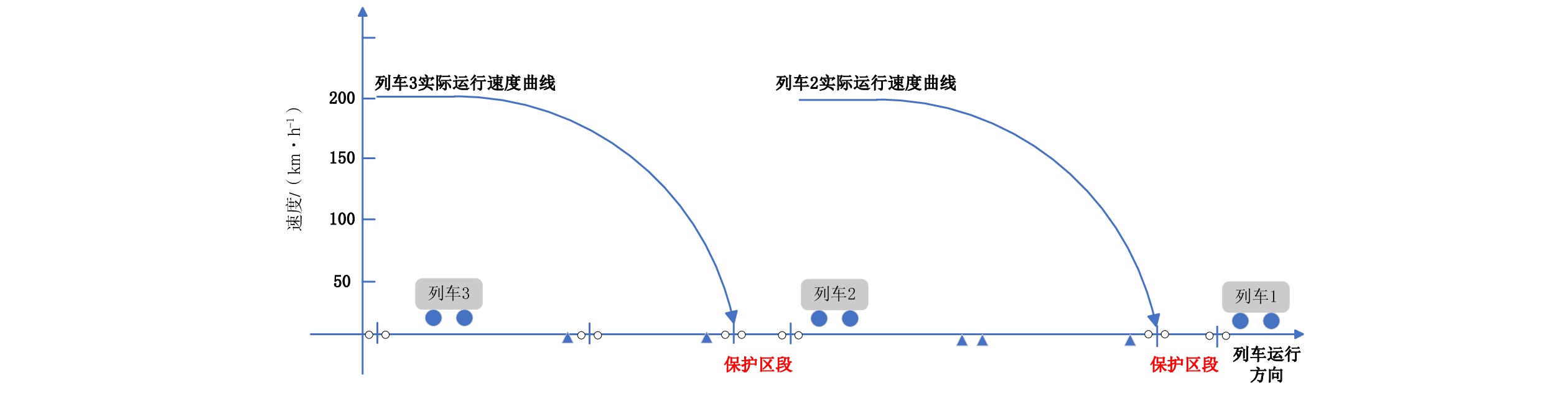
2.2.2 保护区段
CBTC系统中,列车运行的空间间隔须满足制动距离的需要,还要适当考虑保留安全余量和CBTC系统响应时间内的运行距离。CBTC列车间隔控制原理,如图3所示。
速度提升后,列车紧急制动距离也会随之增大,这会对CBTC系统的数据配置和设备布置带来一定的影响;另外,高速度运行情况下的测距偏差也会影响测距值的准确性。因此,CBTC系统应综合安全制动模型、车辆参数、线路条件等因素,确定高速线路的保护区段设置长度。
2.3 ZC设备改进方案
列车速度提高后,信号设备一级集中站的区域控制器(ZC,Zone Controller)分界点处,可能存在飞车宕机、跳计轴丢车、区段误判等场景。可以通过限制分界点处的区段长度和限制列车在分界点的速度来避免事故。另外,当列车最高速度提升至200 km/h时,列车脱轨防护的范围也须相应增加。
2.4 其他改进方案
列车速度提高,对列车自动监控(ATS,Automatic Train Supervision)系统功能无影响,但是,需要根据线路的实际情况调整最高临时限速的设置;在绘制列车运行图时,区分运行等级所对应的时间也会有所变化。因此,需要适应性调整ATS的软件配置和显示界面。
另外,关于计轴设备在交流制式供电环境下的抗干扰问题,可以从两个层面进行优化。从计轴设备本身的性能指标方面着手,逐步提升其相关部件的电磁兼容能力;也可以根据计轴设备的工作原理,增加传感器的冗余度等。通过增加回流线等措施,尽量改善设备的应用环境。
3 测试、验证与认证
目前,国内多个供货商已经完成了CBTC系统的高速差异功能补充测试,并取得了产品安全认证证书。
为满足160~200 km/h高速环境下的车辆、信号及通信等系统的现场测试要求,雄安R1线选取了雄安站—霸州开发区站的两站一区间作为高速测试试验段。2023年4月,国家铁道试验中心也已经完成了环形线提速改造工程,因此,200 km/h的现场工程测试将具备更充分的测试条件。
4 结束语
本文重点分析了CBTC系统中与速度密切相关的各类系统和设备的高速适应性问题。通过调研轨旁设备和车载外围设备适应速度、供货商室内测试及产品认证情况等,得出了CBTC系统能够满足在160~200 km/h速度等级下安全运行的结论。
综上,通过对传统CBTC系统做适应性改进,CBTC系统能够满足高密度、高自动化等级轨道快线运营需求,也具备将线路设计速度进一步提升至200 km/h的条件,可为今后轨道快线信号系统的建设提供一种新的选型思路。
-
表 1 国内部分高速度等级轨道交通线路情况
序号 线路 服务客群 速度等级
/(km·h−1)最小间隔
/min信号系统
选择互联互通
情况1 北京大兴机场线 机场客流 160 4 CBTC系统 雄安R1线 2 北京平谷线 市域通勤 160 2~2.5 CBTC系统 3 雄安R1线 机场客流、城际商务 160~200 2.5~3 CBTC系统 大兴机场线 4 郑州K2线 市域通勤、区域商务 160~200 2.5~3 CBTC系统/ CBTC+ CTCS-2兼容系统 5 上海机场联络线 机场客流、市域通勤 160 3 CTCS-2系统/CBTC+ CTCS-2兼容系统 嘉闵线、金山线 6 上海嘉闵线 市域通勤 160 3 CTCS-2系统 机场联络线 7 广州18号线 市域通勤 160 2.5~3 CBTC系统 8 深惠城际 城际商务 160~200 3 CTCS-2系统/CBTC+ CTCS-2兼容系统 注:基于通信的列车运行控制(CBTC,Communication Based Train Control)系统;中国列车运行控制系统2级(CTCS-2,Chinese Train Control System-2)。  下载: 导出CSV
下载: 导出CSV
表 2 国内部分厂家计轴情况
序号 计轴设备型号 适应速度/(km·h−1) 业绩应用 线路 线路速度/
(km·h−1)1 提芬巴赫TAZ II/S295型 450 北京大兴机场线
广深线
沪昆线160
200
2002 福豪盛ACS2000型 450 3 微机系列JZ1-H型 450 渝利铁路 200 4 泰雷兹AzLM型 380/440(可选) 5 AzS(M)350U型 440 6 ARTJZ型 350 广州18号线 160
下载: 导出CSV
-
[1] 童 超. 市域铁路列车运行控制系统方案选择研究 [J]. 铁道运输与经济,2022,44(7):35-41. [2] 李 晶,王 鹏,杨艳锋,等. 都市圈快速轨道交通信号系统制式方案选择 [J]. 城市轨道交通研究,2022,25(11):23-26,31. [3] 广东省市场监督管理局. 城际铁路设计细则: DB44/T 2360-2022[S]. 广州: 广东省标准化研究院, 2022. [4] 河北雄安新区管理委员会改革发展局, 河北雄安新区管理委员会规划建设局. 雄安轨道快线设计标准: DB1331/T 001-2021[S]. 北京: 中国标准出版社, 2022. [5] 北京市规划和自然资源委员会, 北京市市场监督管理局. 市域(郊)轨道交通设计规范: DB11/T 1980-2022[S]. 北京, 2022. [6] 赵鹏羽,韩 熠,张雪凡,等. 基于半实物仿真的LTE-M系统高速性能测试 [J]. 工业控制计算机,2022,35(8):1-4. [7] 张雁鹏. CBTC系统车地通信切换策略研究[D]. 兰州: 兰州交通大学, 2018. [8] 徐成永, 姜传治, 贺 鹏. 大兴机场线综合规划与总体设计[M]. 北京: 中国铁道出版社有限公司, 2020: 214-215. [9] 李建国,张鑫奎,郑云水. 安装角度偏差及列车速度对应答器电磁传输性能影响研究 [J]. 电子测量与仪器学报,2023,37(1):212-221. [10] 袁 磊,甘庆鹏,刘 雨,等. 高速铁路列控系统列车位置在线估计算法研究 [J]. 铁道学报,2017,39(9):95-99. -
期刊类型引用(1)
1. 马媛媛. 基于SSM框架的受电弓碳滑板温测系统的设计与开发. 价值工程. 2024(26): 84-86 .  百度学术
百度学术
其他类型引用(0)














计量
- 文章访问数: 54
- HTML全文浏览量: 69
- PDF下载量: 15
- 被引次数: 1
