

BIM based catenary cantilever assembly design system
-
摘要: 针对现阶段接触网腕臂装配建筑信息模型(BIM,Building Information Modeling)设计主要采用通用安装模型,无法精确反映现场实际安装情况的问题,建立单元库创建腕臂装配模板,结合参数化单元技术及自定义实体等技术,研发了基于BIM的接触网腕臂装配设计系统。该系统可快速创建并布置接触网腕臂装配模型,实现装配设计的自动化和智能化。实践表明,开发的系统大幅提高了接触网腕臂的装配质量和精度,可满足接触网BIM设计的需要,为进一步推进接触网的数字化、智能化发展提供支撑。
-
关键词:
- 接触网 /
- 腕臂装配 /
- 建筑信息模型(BIM) /
- 数字化 /
- 参数化
Abstract: At present, the design of the Building Information Modeling (BIM) for catenary cantilever assembly mainly adopts a universal installation model, which cannot accurately reflect the actual installation situation on site. This paper established a unit library to create a cantilever assembly template, and combined parameterized unit technology and custom entity technology to develop a BIM based catenary cantilever assemblydesign system. This system can quickly create and arrange a catenary cantilever assembly model, achieving automation and intelligence in assembly design. Practice has shown that the developed system has significantly improved the assembly quality and accuracy of the catenary cantilever model, which can meet the needs of the BIM design of the catenary and provide support for further promoting the digital and intelligent development of the catenary.-
Keywords:
- catenary /
- cantilever assembly /
- Building Information Modeling (BIM) /
- digital /
- parameterization
-
接触网腕臂结构作为电气化铁路系统中的主要组成部分,其装配设计质量直接关系到列车运行的安全性及稳定性。建筑信息模型(BIM,Building Information Modeling)已经在铁路行业得到广泛应用[1]。BIM技术将三维建模、数据管理和协同设计应用于铁路设计与建设中,可有效提高设计质量和效率,降低设计成本,同时提高运营和维护效率[2]。目前,BIM相关配套软件均为通用三维建模软件,还未针对国内接触网设计流程及设计习惯适配开发;传统的接触网腕臂装配设计通常基于手工作图和个人经验,设计效率低、精度不高,且难以满足铁路工程数字化和智能化的需求[3-5]。
针对以上问题,本文结合接触网腕臂装配的特点,提出了基于自定义实体技术和参数化单元技术的接触网腕臂装配设计方法,研发了基于BIM的接触网腕臂装配设计系统,以满足接触网BIM正向设计的需求。
1 系统设计
1.1 系统架构
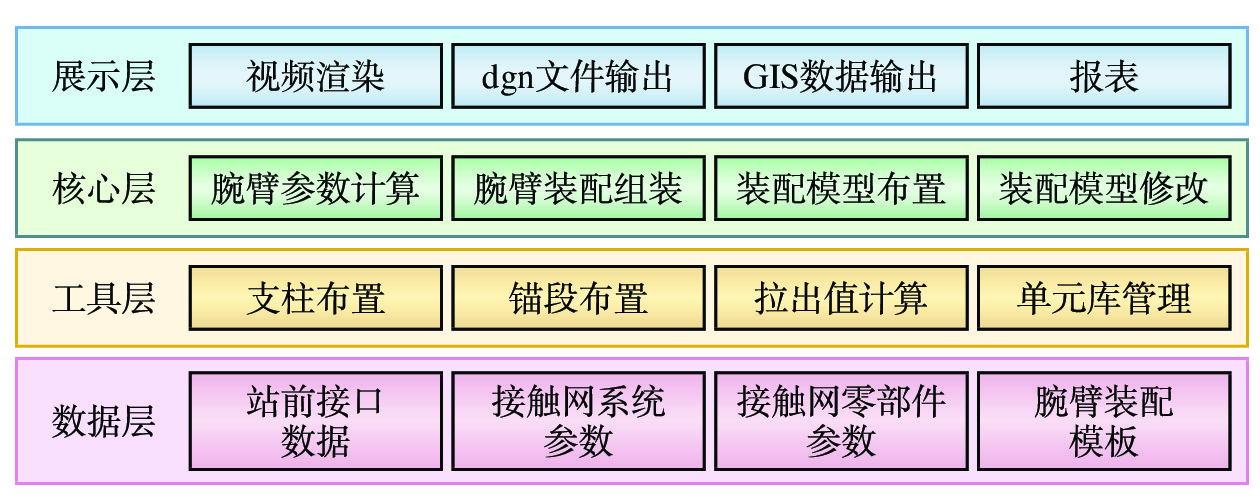
基于BIM的接触网腕臂装配设计系统采用Bentley OpenRail Designer进行开发,系统架构如图1所示。
(1)数据层:主要负责接触网专业与外部专业的接口数据处理,将外部数据提取、加工为方便本系统调用的数据;同时,负责处理本专业相关的配置数据等。
(2)工具层:主要包含接触网支柱布置、锚段布置、拉出值计算及单元库管理等,提供了腕臂装配设计的基础工具。
(3)核心层:包括接触网腕臂装配的整个设计过程,包括腕臂参数计算、腕臂装配组装、装配模型布置及腕臂装配动态修改等功能。
(4)展示层:用于数据输出和模型展示。腕臂装配模型设计完成后,可按需输出为dgn文件、GIS数据、报表等形式,也可输出到LumenRT进行视频渲染,实现更好的可视化效果。
1.2 装配流程
基于BIM的接触网腕臂装配流程如下。
(1)建立单元库,包括腕臂零件、支柱等构件;
(2)对接触网进行杆位布置,确定腕臂装配安装类型、位置等参数;
(3)创建腕臂装配模板,包括腕臂类型、长度、形状、连接方式等属性;
(4)通过自定义实体技术创建腕臂装配模型,并将腕臂装配与支柱进行组合,生成完整的接触网腕臂装配方案,对生成的装配方案进行微调和优化,以满足工程设计要求;
(5)按需自动生成各类报表和统计数据并将生成的接触网腕臂装配方案导出为轻量化的三维格式,进行可视化渲染等操作。
2 功能实现
2.1 单元库建立
接触网系统是由众多零部件组成的,完备的接触网零部件单元库是接触网BIM设计的前提[6-8],接触网主要零部件分为以下几类。
(1)基础:包括H型钢柱基础、等径圆钢管柱基础、隧道预埋槽道基础、拉线基础等;
(2)支柱:包括H型钢柱、等径圆钢管柱、隧道吊柱、硬横梁吊柱等;
(3)腕臂结构:包括平腕臂、斜腕臂、腕臂支撑等;
(4)定位装置:包括定位管、定位管支撑、定位器、定位线夹等;
(5)接触悬挂:包括接触线、承力索、整体吊弦、弹性吊索、电连接等;
(6)其他:补偿装置、附加导线、标识牌等。
2.2 杆位布置
采用交互的方式对接触网的支柱进行布置,通过预置跨距布置算法和跨距选用表,用户只需指定接触网系统类型、跨距算法、布置的起止点,程序可自动完成杆位布置。
杆位布置采用了Openrail Designer内置的参考线进行辅助定位,参考线是轻量化的自定义对象,与设计标准绑定,便于接触网支柱、腕臂装配等自定义对象读取设计参数信息和线路信息。
2.3 腕臂装配模板创建
腕臂装配模板是按接触网腕臂类型预先创建好的装配参数的集合,通过使用自定义模板的方式创建腕臂装配模型,其零部件类型和参数可根据工程需要进行修改、扩充,使其适应不同的工程类型和安装工况。腕臂装配模板参数分为固定参数和实例化参数。
(1)固定参数包括:模板编号、腕臂类型、定位方式、承力索座外露长度、腕臂支撑单耳距平腕臂绝缘子距离、腕臂底座型号、承力索座型号、平腕臂绝缘子类型、斜腕臂绝缘子类型、平腕臂型号、斜腕臂型号、定位管型号、定位器型号、采用定位管支撑、采用定位管吊线、腕臂支撑类型、定位管支撑类型等;
(2)实例化参数包括:导线高度、结构高度、拉出值、曲线半径、外轨超高、上底座高度、下底座高度、腕臂支撑单耳距斜腕臂绝缘子距离等。
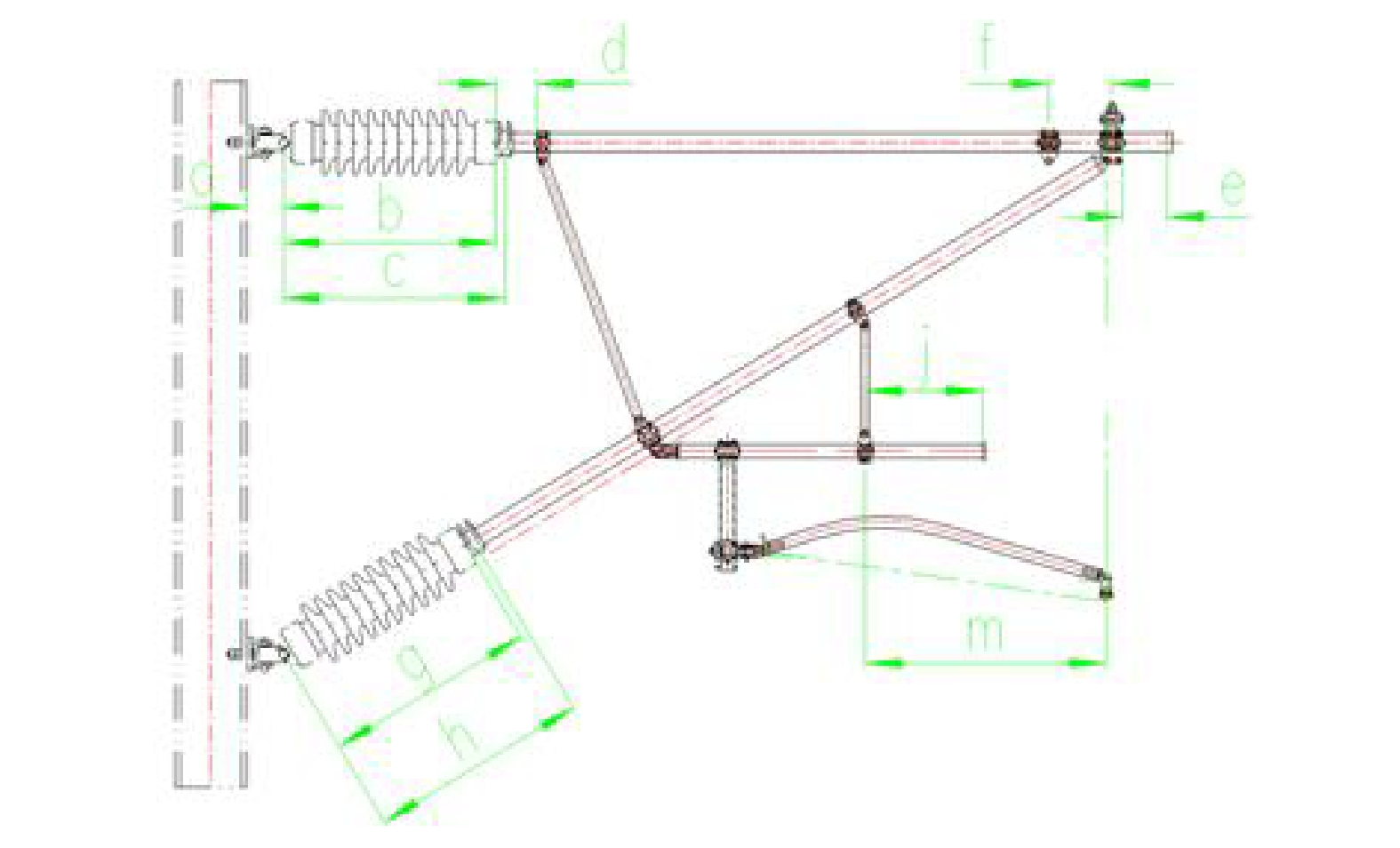
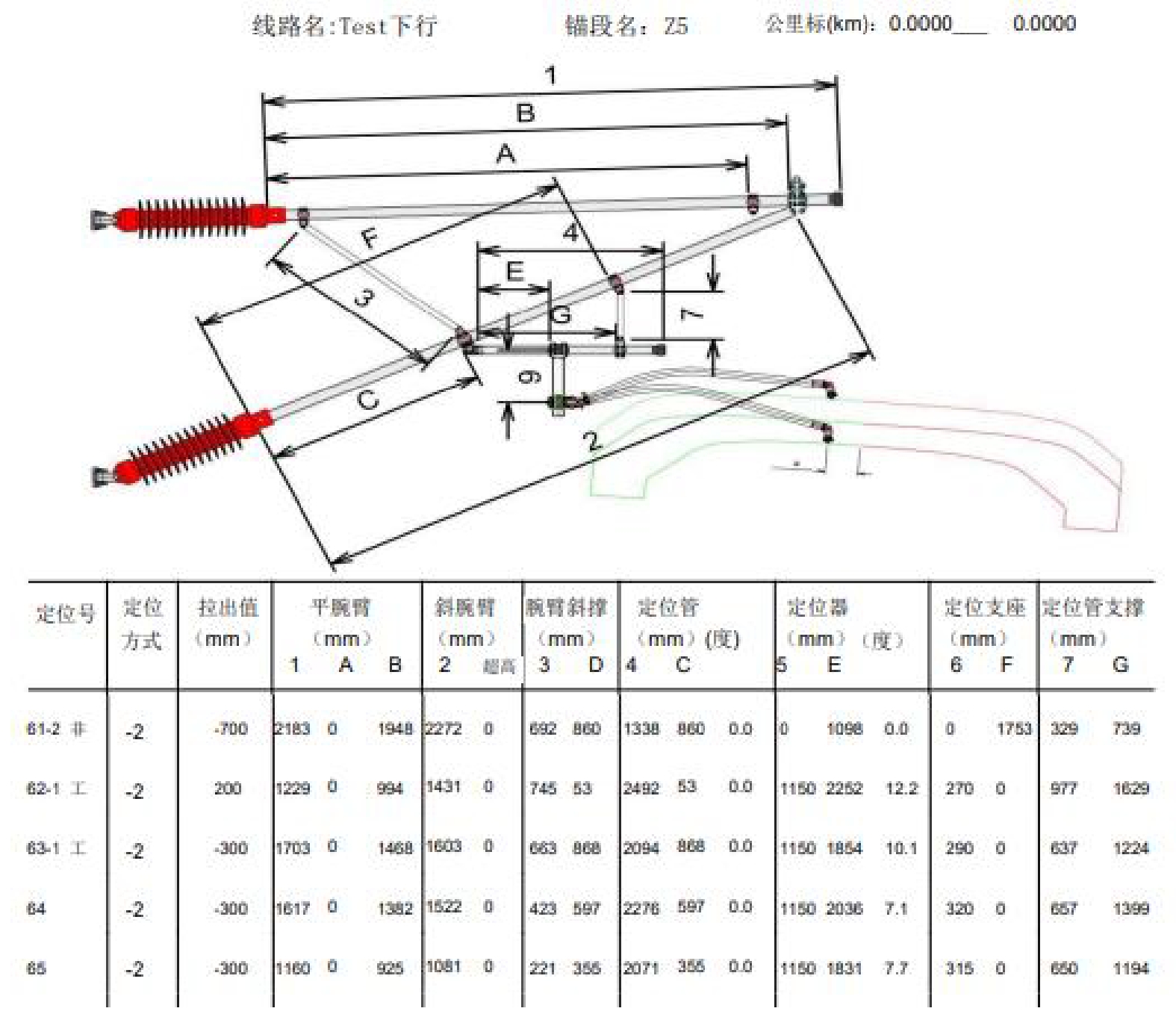
腕臂装配模板部分参数约束如图2所示。
通过模板固定参数的约束,结合实例化参数,可以唯一确定腕臂装配其余部分的尺寸、位置、角度等参数,方便后续根据计算结果进行模型的创建。
2.4 腕臂装配模型创建
腕臂装配模型的创建流程如下。
(1)数据输入
腕臂装配的计算边界条件直接从三维模型中获取,通过创建腕臂装配自定义对象的方式,建立接触网自定义对象和其他专业对象间的隶属关系并监控和响应关联对象的改变, 实现腕臂装配输入参数的自动获取和更新。当接触网支柱位置或线路条件改变时,系统可实时感知并驱动腕臂装配三维模型的重建。
(2)模板解析
根据输入参数,系统自动确定腕臂装配类型并从数据库中读取对应的模板参数,根据模板参数加载单元库中对应的零部件供腕臂装配使用。
(3)参数计算
腕臂装配的参数计算需对既有成熟的腕臂预配算法进行适应性修改,移植既有的腕臂预配算法,在腕臂装配模板约束条件及三维变换的基础上建立三维模型专用的计算模块。
参数计算模块在不同设计阶段和建模精度要求下,根据设置参数调用不同的算法进行计算。在保证腕臂装配模型建模精度的同时,使得模型轻量化,加快了建模和模型浏览的速度,并实现同一腕臂装配模型在不同设计阶段的复用。
(4)模型创建
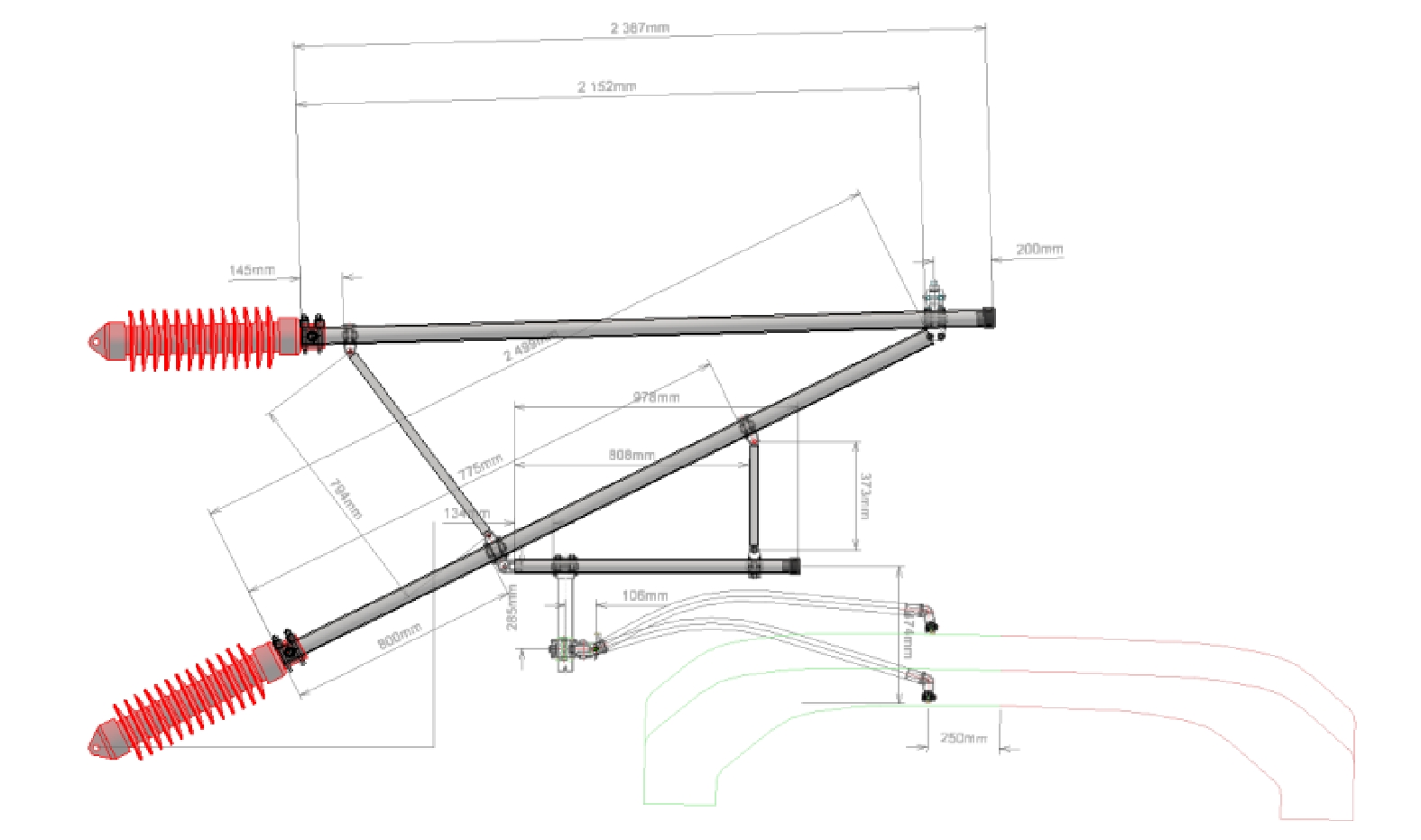
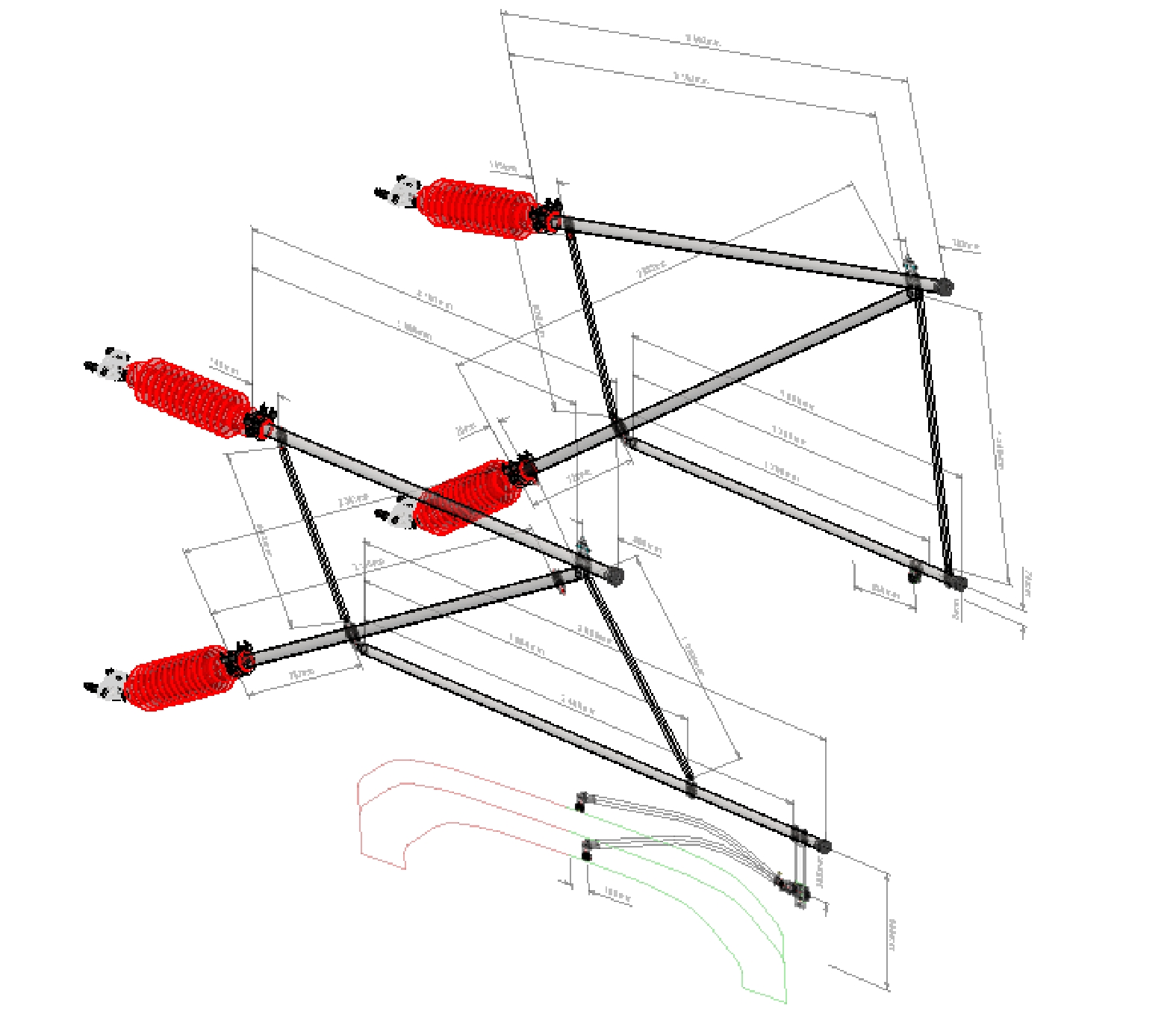
系统根据输入参数在单元库中查找对应当前参数的腕臂装配模型是否存在,如果存在则退出创建过程,如果不存在则调用腕臂装配三维模型专用算法进行参数计算和模型创建,并将创建好的模型存入单元库中,后续模型布置模块可直接从单元库中调用创建好的腕臂装配三维模型。腕臂装配模型示例如图3所示。
2.5 模型布置
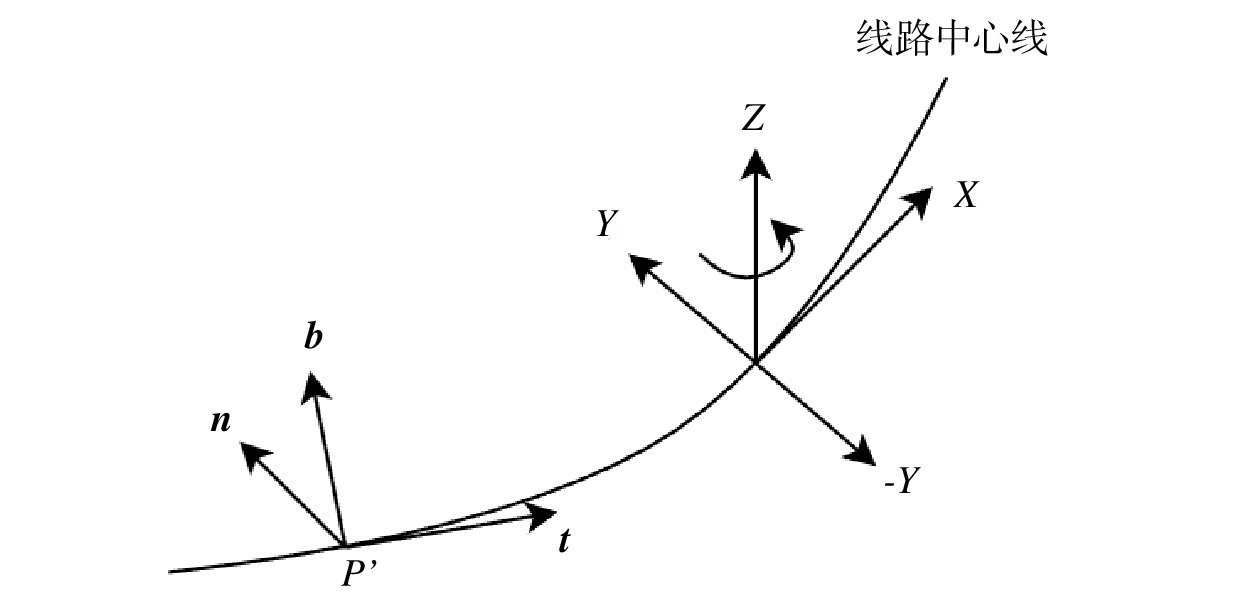
接触网腕臂装配的支持结构为支柱(吊柱),腕臂装配的三维模型应在接触网杆位布置完成后进行。接触网悬挂点处的三维旋转矩阵计算方式如下。
将线路中心线的三维空间曲线投影到水平面上得到平面曲线,通过平面曲线得到设计里程对应的点 P;然后从点 P 处垂直向上投影得到线路中心线上对应的点 P',计算曲线在 P' 处的旋转矩阵,其由单位切向量 t、主法向量n和副法向量b组成,如图4所示。
由于接触网支柱(吊柱)始终保持与水平面垂直的状态,因此,副法向量b应为世界坐标系的Z轴方向(施工深化计算时,考虑支柱斜率,副法线向量与支柱中心线重合)。求出由t,b,n组成的三维矩阵的逆矩阵,得到旋转矩阵M,用旋转矩阵M对接触网支柱、吊柱、腕臂等进行三维变换,得到接触网模型在三维模型中的实际坐标位置,将对应的三维模型从单元库中取出,并进行三维变换,完成腕臂装配三维模型的创建。
在设计过程中,有时需要对局部参数进行修改,如腕臂装配的拉出值、结构高度等,此时可直接在属性浏览器中修改腕臂装配的对应的EC(Engineering Content)参数,腕臂模型可实时更新,关联的接触线、承力索也同步实现更新。
2.6 成果输出
接触网腕臂装配设计系统在模型创建完成后,可导入施工测量数据,并按实际数据更新设计模型,实现设计模型向施工模型的传递,以二、三维相结合的方式自动生成预配图纸和腕臂预配结果。相对于传统的腕臂预配模式,具有可视化、信息化及参数化程度高等优势,能够更直观地反映预配成果,有效指导现场施工。腕臂预配图纸及报表示例如图5、图6所示。
在完成接触网腕臂装配模型的创建和布置后,可按锚段提取腕臂装配的零部件工程数量表,并导出Excel表格,实现接触网零部件工程量的精细化统计,有效提升概预算的准确性,并能为施工开展成本分析、物料进度管理等工作提供数据支撑[9]。
此外,通过将设计模型导出至LumenRT中进行视频渲染,可得到制作精美且易于理解的可视化文件,呈现交互式、三维虚拟实境的演示。
3 关键技术
3.1 共享单元和参数化单元技术
共享单元和参数化单元是构建接触网BIM的基础。共享单元是可复用的、通用的构件,可以在多个工程中使用。通过共享单元,可以将相同或相似的构件标准化、模块化,存储在单元库或设计文件中。参数化单元是使用变量和函数创建的特殊单元,通过将变量和函数分组来定义它们的参数集。一个参数化单元可以有多个变体,在放置单元时选择其中一个变体,就可创建参数化单元的一个实例。共享单元和参数化单元减少了重复建模,通过将共享单元中的参数化单元设置为可编辑状态,设计人员可便捷调整接触网的参数,从而实现自动化设计和快速调整。
接触网腕臂装配过程中存在大量相同的零部件,使用共享单元可显著缩减设计文件的大小。例如,将接触网承力索座、定位线夹等零部件分别创建为承力索座单元、定位线夹单元,并将其作为一个整体进行操作。
3.2 自定义实体技术
自定义实体技术是通过编写代码自定义一些特殊的构件或对象,使其在BIM中能够被正确识别、显示和管理,有助于设计人员更好地表达设计意图,同时也可以扩展设计软件的功能和灵活性。本文系统使用自定义实体来定义接触网腕臂装配模型,将模型的几何实体与自定义的参数、约束、规则等结合起来,实现高度管理和定制化的模型数据,同时也可实现与其他软件的数据交换和共享。自定义内容主要包括以下几个方面。
(1)自定义属性:通过定义腕臂装配的专用属性类型,如定位方式、侧面限界、拉出值、腕臂长度、定位器长度等,并将这些属性附加到模型对象上,可方便后续的查询和统计。
(2)自定义约束:通过自定义腕臂装配的约束类型,如距离约束、水平约束、垂直约束等,并将这些约束附加到模型对象上,从而控制腕臂模型对象的行为和位置。
(3)自定义规则:通过自定义腕臂装配的规则类型,如碰撞检测、尺寸检查等,实现模型的自动化检查和优化。
(4)自定义关联关系:通过自定义关联关系,将腕臂与支柱、线路中心线等关联起来,实现设计参数的自动更新,并通过自动感知参数变化,实时驱动模型的更新。
通过自定义实体技术可大大提高用户的工作效率和准确性,为工程设计提供更好的支持。
3.3 数据管理与共享技术
本文系统中创建了自定义构件和对象,并将其添加到BIM数据模型中。构件和对象包含了与接触网腕臂装配相关的完整属性、约束和规则等信息,确保数据的添加、修改均在系统内进行,从而实现数据的统一管理和维护。系统中的数据管理与共享技术体现在以下几方面。
(1)数据标准化:在系统设计中,制定了基于ECSchema的标准化格式,设计数据必须遵循这一标准格式,确保了数据的一致性、完整性和可互操作性。
(2)数据分类与归档:系统中的BIM数据按照几何实体与数据实体分别存储,并按照接触网构件工点位置及设备类型,以区间、锚段、杆位的分类方式进行管理,便于后续查找和使用。
(3)数据交换:在接触网腕臂装配设计系统中的数据分为几何数据及非几何数据。其中,几何数据通过使用软件中的导入/导出功能,或使用通用三维数据格式(如obj)进行交换;非几何数据可通过多种方式进行交换,例如XML、CSV等标准数据格式,以及WebAPI等技术手段。
(4)数据共享:通过协同设计平台WebAPI与接触网BIM腕臂装配设计系统的集成,可以实现从协同设计平台中获取设计数据,包括站前专业的模型数据、项目相关信息等。同时,也可以将接触网设计系统中的设计结果和装配方案上传到协同设计平台中,实现数据的共享和交流。
4 结束语
本文以Bentley OpenRail Designer为开发平台,通过参数化单元技术、自定义实体等技术实现了接触网腕臂装配的自动化及智能化设计。研究成果已成功在京张高铁及崇礼铁路项目中得到应用,显著提高了接触网腕臂装配设计的效率和精度,进一步推进了接触网的数字化、智能化发展。
-
[1] 王同军. 中国智能高速铁路体系架构研究及应用 [J]. 铁道学报,2019,41(11):1-9. [2] 徐 骏,李安洪,刘厚强,等. BIM在铁路行业的应用及其风险分析 [J]. 铁道工程学报,2014,31(3):129-133. DOI: 10.3969/j.issn.1006-2106.2014.03.023 [3] 耿 肖,石瑞霞. BIM技术在接触网设计中的应用 [J]. 铁路技术创新,2017(4):82-85. [4] 刘红良,王万齐,王辉麟,等. BIM技术在高速铁路接触网工程中的应用研究 [J]. 铁路计算机应用,2019,28(6):54-58. DOI: 10.3969/j.issn.1005-8451.2019.06.013 [5] 陈珊珊,王 颖,徐 灏. 基于Dynamo的接触网自动装配设计 [J]. 铁路技术创新,2019(4):111-115. [6] 黄 鑫,鲁小兵. BIM技术在400 km/h高速铁路接触网工程中的应用 [J]. 高速铁路技术,2021,12(5):102-106. [7] 黎仕强. 接触网BIM设计关键技术研究 [J]. 铁路技术创新,2015(3):63-65. [8] 刘北胜,尹逊霄,郭 歌,等. 铁路工程BIM协同设计与构件共享研究 [J]. 铁路计算机应用,2020,29(12):25-28. DOI: 10.3969/j.issn.1005-8451.2020.12.006 [9] 金 光. BIM技术在接触网腕臂预配中的应用研究 [J]. 铁路技术创新,2019(1):72-75. -
期刊类型引用(3)
1. 赵剑峰,张传军,王学柱,郭鹏飞,王志华. 基于激光点云的复杂站场接触网静态检测系统设计与实现. 铁路计算机应用. 2024(06): 25-30 .  本站查看
本站查看
2. 于金鑫. BIM技术在地铁高架桥段接触网布置中的应用. 电子技术. 2024(10): 75-77 . 百度学术
3. 杨兴,郭泽,史瑞昌,谭衢霖,邓瑞辰. 基于BIM的高速铁路接触网参数化建模研究. 铁路工程技术与经济. 2024(06): 37-41 . 百度学术
其他类型引用(0)
 下载:
下载:
计量
- 文章访问数: 99
- HTML全文浏览量: 88
- PDF下载量: 18
- 被引次数: 3
