

Automatic extraction method of railway computer-based interlocking station data
-
摘要: 针对计算机联锁自动测试软件所需的铁路站场数据依赖人工手动输入、自动化程度不高的问题,提出了铁路计算机联锁站场数据自动提取方法。以经过验证无误的联锁上位机界面图像作为图像识别系统的输入,分析信号设备显示特征并定义数据模型,基于OpenCVSharp计算机视觉库,利用图像识别相关算法,设计识别流程,自动提取站场数据。采用上述方法开发软件,展示信号设备识别与数据提取效果。该方法能准确识别出联锁上位机界面中的信号机、道岔与轨道区段,从而实现相关站场数据的自动提取。Abstract: The railway station data required by the computer-based interlocking automatic test software depends on manual input, and the degree of automation is not high. To solve this problem, this paper proposed an automatic extraction method of railway computer interlocking station data, took the verified interlocking host computer interface as the input of an image recognition system to analyze the display characteristics of signal equipment and define the data model. Based on OpenCVSharp computer vision library, the paper designed the recognition process by using the image recognition related algorithm to automatically extract the station data, developed the software using the above method to show the effect of signal equipment identification and data extraction. This method can accurately identify the signal, switch, and track circuit district in the interface of interlocking host computer, so then implement the automatic extraction of relevant station data.
-
计算机联锁系统是保障行车安全和提高运输效率的车站信号控制系统之一[1],联锁软件作为系统核心,在投入使用前需经过严格的审核和测试。关于软件测试通常有人工测试和自动测试2种方式。
文献[2—5]在已知站场数据的情况下,分别基于脚本驱动生成测试用例,采用形式化工具编制测试脚本,应用等价类划分与故障树分析法编写测试用例,采用I/O接口仿真技术,从不同方面对提高计算机联锁软件测试自动化程度进行了研究。但以上方法中,站场数据依赖人工手动输入,自动化水平不高。文献[6—8]提出了基于信号平面布置图提取站场数据的方法,但应用于计算机联锁软件测试时,又需要将上位机界面转换为平面布置图,过程繁琐、耗时耗力。
为了更好地解决以上问题,本文提出了基于OpenCVSharp对上位机界面进行识别来自动提取站场数据的方法。该方法以《车站计算机联锁操作显示技术规范》[9]为准则,以图像识别相关理论为依据,应用OpenCVSharp图像识别技术对上位机界面进行识别处理,准确识别出信号机、道岔与轨道区段,从而自动提取相关铁路站场数据。
1 研究思路
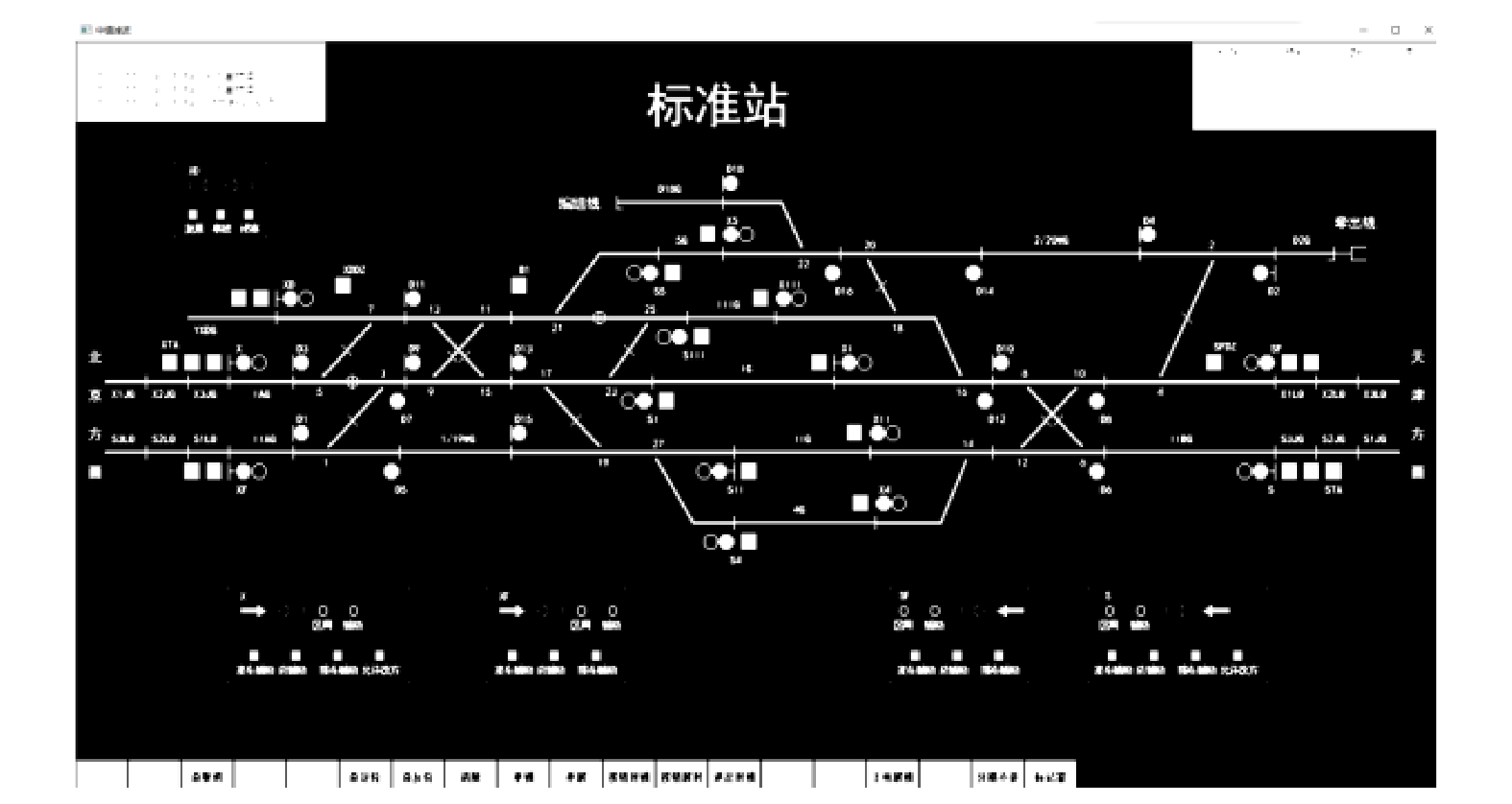
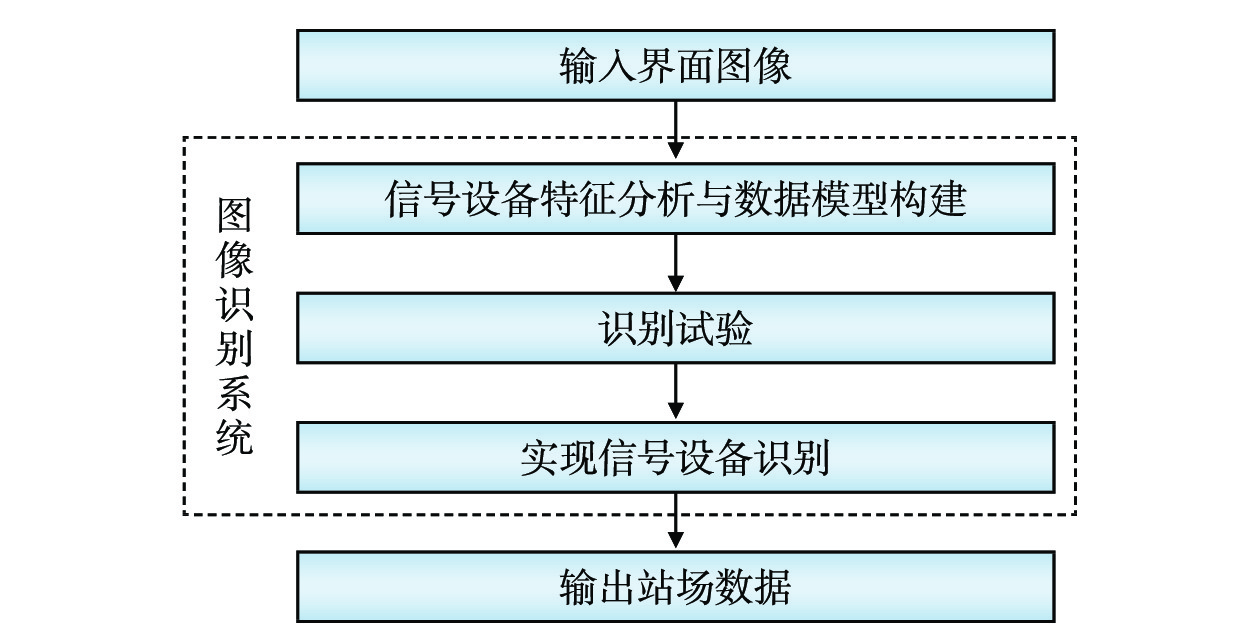
铁路站场数据自动提取方法整体研究思路,如图1所示。计算机联锁上位机界面将站场信息通过图形化方式显示,作为图像识别系统的输入;分析信号设备显示特征,提炼关键信息并构建站场数据模型;研究学习图像识别相关算法,对不同类型的信号设备进行识别试验;结合设备的显示特征,设计流程识别信号设备,并将提取的站场数据保存在数据模型中。
2 信号设备显示特征与数据模型
2.1 显示特征分析
铁路信号设备主要包括信号机、道岔和轨道电路,文献[9]对各信号设备在计算机联锁上位机界面中的绘制特点作了明确规定。
(1) 列车信号机(包括出站兼调车)采用双灯位,即用2个圆圈表示;调车信号机采用单灯位,即1个圆圈表示;信号机基座采用1段短竖线表示;高柱信号机在基座和圆圈之间增加1段短横线来表示灯柱;信号机名称用银白色表示。
(2)道岔斜线在屏幕中的倾斜角度宜一致,应提供道岔的状态信息,如表示道岔开通位置的短线在道岔定位时显示绿色,反位时显示黄色等。
(3)轨道区段线条不能有明显锯齿,表示到发线的线条间距统一,应提供轨道区段空闲、占用等状态信息,轨道区段名称采用银白色。
文献[10]对道岔的凸包形状进行了分析:单动道岔的凸包形状为三角形和梯形,双动道岔为斜直线,交叉渡线为菱形。
根据上述内容,本文对信号设备主要类型及显示特征进行了分析总结,如表1所示。
表 1 信号设备主要显示特征设备种类 类型 特征 信号机 列车型 面积:100π+50 
禁止灯光:红色 调车型 面积:50π+50 
禁止灯光:蓝色 道岔 单动道岔 线条颜色:浅蓝色 
凸包形状:三角形、梯形 双动道岔 线条颜色:浅蓝色 
凸包形状:斜直线 交叉渡线 线条颜色:浅蓝色 
凸包形状:菱形 轨道区段 股道 线条颜色:浅蓝色 
上、下方设有列车信号机 无岔区段 线条颜色:浅蓝色 
轨条内无道岔状态表示块 道岔区段 线条颜色:浅蓝色 
轨条内含道岔状态表示块 2.2 数据模型构建
站场数据主要描述铁路信号设备的属性信息,定义各类数据模型如下。
定义1:信号机数据模型Signal由一个五元组<SigName,SigPosition,SigType,SigDirection,SigTallLow>组成。
定义2:道岔数据模型Switch由一个四元组<SwiName,SwiType,SwiDirection,SwiPosition>组成。
定义3:轨道区段数据模型Section由一个六元组<SecName,SecLeftPos,SecRightPos,SecBifNum,SecBifPoint,SecType>组成。
在完成信号设备的识别后,设备属性信息存储在各类数据模型中,方便其他程序的调用。
3 图像识别算法与试验
C#相比于C++而言在对图形用户界面(GUI ,Graphical User Interface)中的开发更具有便捷性。针对C#的计算机视觉库主要有2种:EmguCV和OpenCVSharp,二者都提供了计算机视觉函数接口和一系列界面控件接口,但由于EmguCV在使用时需要将C++封装成动态链接库在C#中调用,增加了软件开发的难度,而OpenCVSharp具有界面开发快、库文件调用方便、安装包小、商业应用友好等优点,因此本文采用OpenCVSharp计算机视觉库将图像识别相关算法应用于联锁上位机界面,其中包括图像预处理、形态学处理、HSV(Hue, Saturation, Value)颜色分割及模板匹配。
3.1 图像预处理
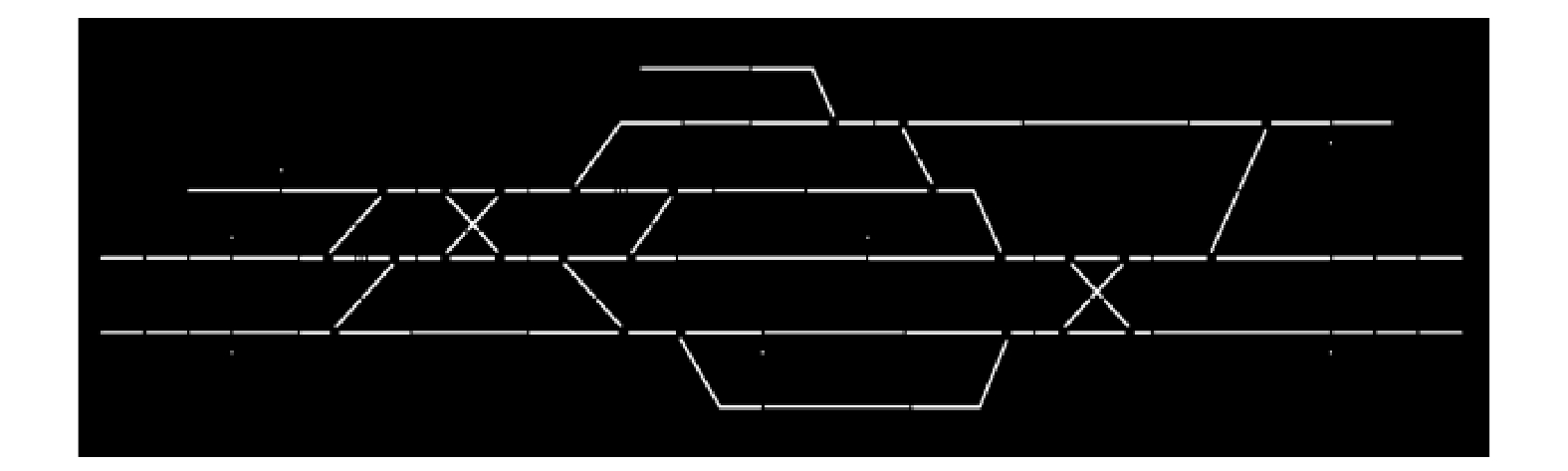
为了克服界面图像中可能存在的模糊、噪声等问题,需要对界面图像进行预处理操作。联锁上位机界面图像的预处理过程包括灰度变换、二值化和图像滤波等。为了增强有关信息的可检测性,本文对上位机界面采用加权平均值法进行灰度变换,可以将图像的三通道转换为单通道,进而将像素值限定在[0,255];采用固定阈值法进行二值变换,可以直接消除不满足阈值条件的干扰信息;采用中值滤波法进行降噪处理可以消除图像中的椒盐噪声。经过预处理后的界面图像,如图2所示。
3.2 形态学处理
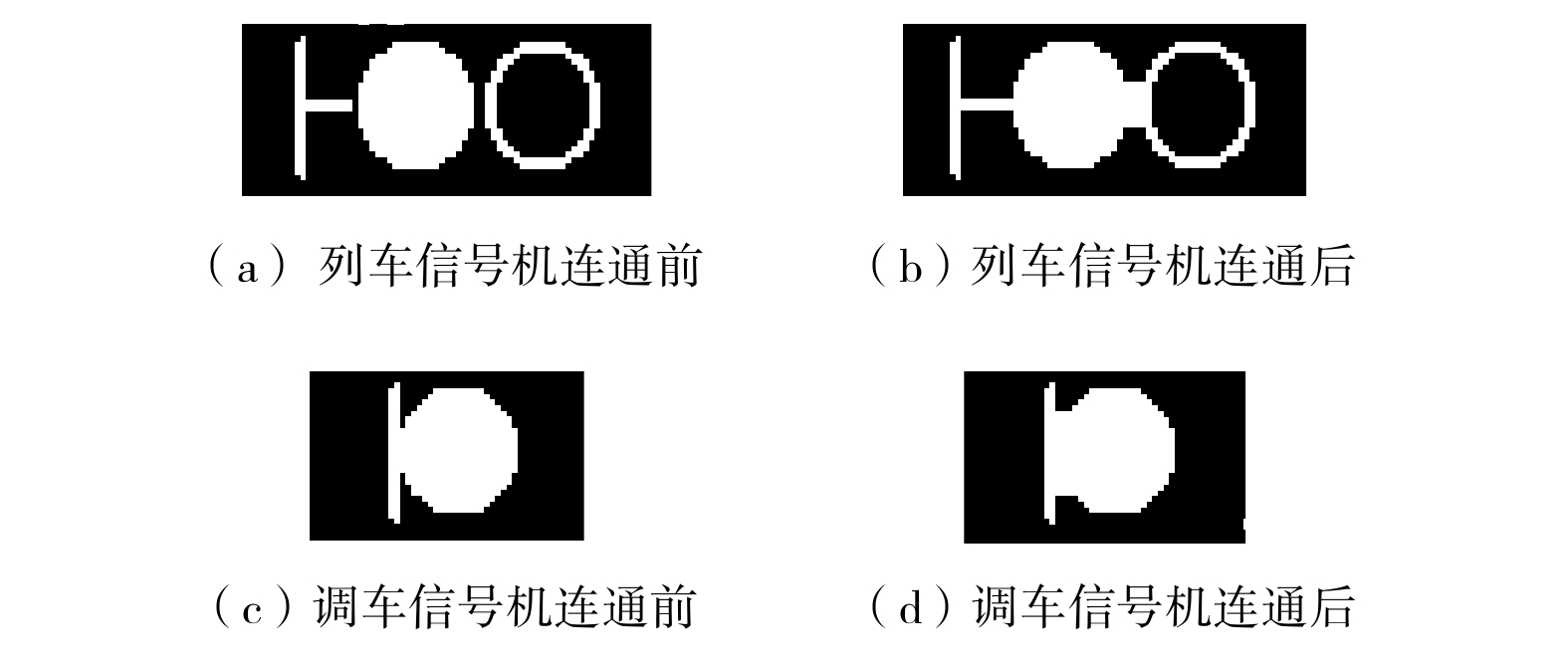
形态学处理的基础是膨胀(Dilate)与腐蚀(Erode)的合理结合。其中,膨胀的作用就是在结构元素(Kernel)的约束下将与目标区域相接触的背景合并到该目标物中。而腐蚀是膨胀的对偶运算,其作用是在结构元素的约束下消除目标区域的部分边界点,使其边界向内部收缩。由于界面设计人员绘制风格的不同,可能会出现信号机圆圈之间,或圆圈与灯柱之间存在间隙的情况。而间隙的存在会影响信号机的识别效果,因此本文提出用形态学运算对信号机进行连通处理,解决间隙问题,便于信号机的识别,信号机连通效果,如图3所示。
3.3 HSV颜色分割
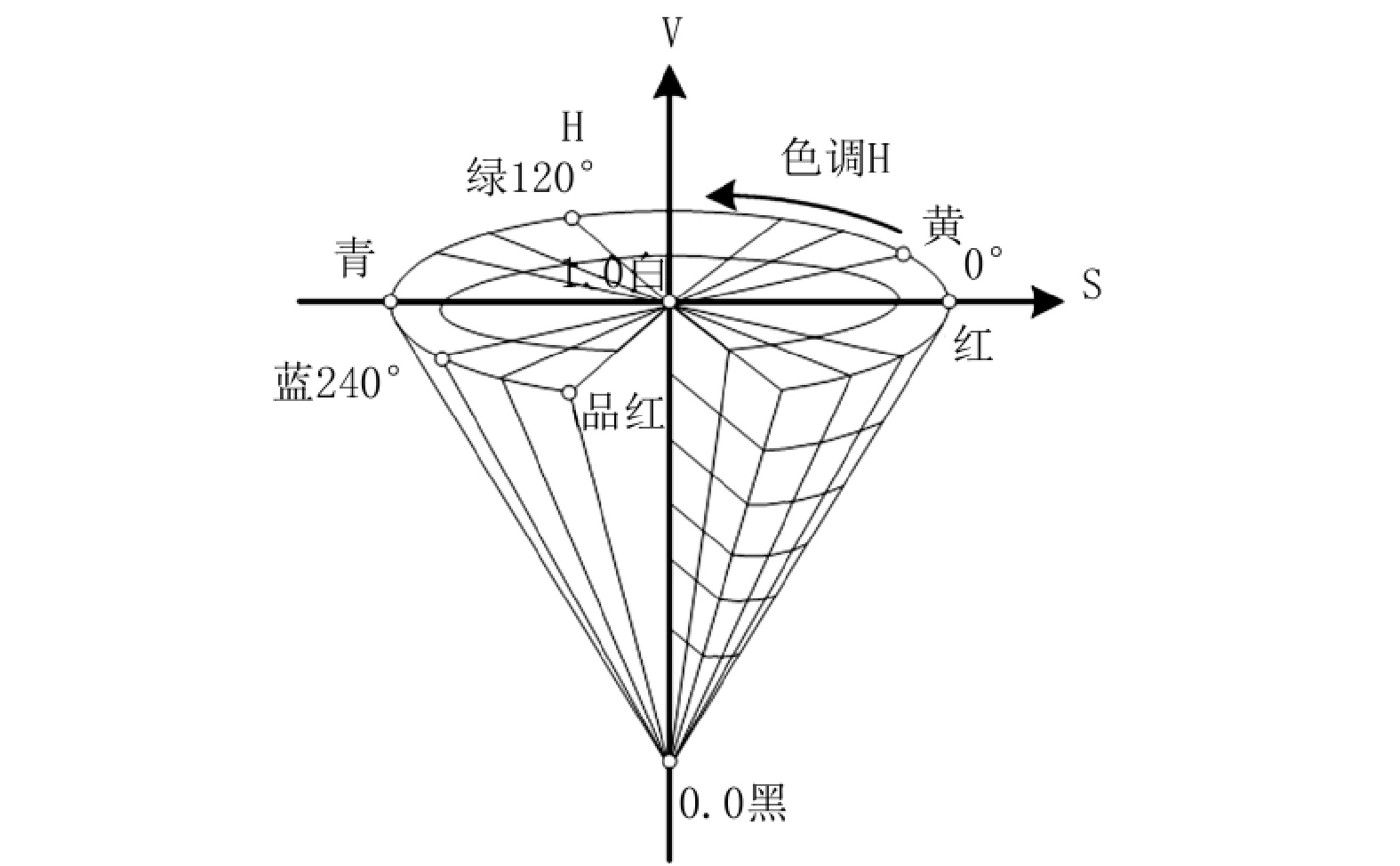
HSV颜色分割要基于HSV色彩空间,引入HSV空间对图像进行分析可以将亮度从色彩中分解出来,在图像增强算法中用途很广泛。在联锁上位机界面中,各信号设备的显示都是由3种基色红(R)、绿(G)、蓝(B)相互以一定的比例复合而成,每像素颜色有256×256×256个取值,对于颜色相近的图元来说,很难在RGB空间中进行准确的分割。但在HSV色彩空间中,彩色图像主要由色调(Hue)、饱和度(Saturation)和明度(Value)3部分组成,如图4所示。
其中,H值将色域范围限定在0~360°,每一种颜色均有确定的色域值,S与V值仅改变了颜色的饱和度与明亮度。因此本文提出用HSV颜色分割技术来初筛颜色特征明显的信号设备。
由表1可知,道岔和轨道区段的线条颜色均为浅蓝色,在用HSV颜色分割技术进行提取时,可以减少界面中其余颜色相近图元的干扰。道岔和轨道区段的HSV提取效果,如图5所示。
3.4 模板匹配
模板匹配算法[11]在图像处理中通常被应用于字符识别,而字符识别算法也不仅限于模板匹配,应用较为广泛的还有人工神经网络(ANN,Artificial Neural Network)与支持向量机(SVM,Support Vector Machine)算法,这2种算法在识别率和识别时间上均优于模板匹配算法,但都需提前进行大量样本字符的训练,更适合对复杂文本进行识别。在上位机界面中,设备名称通常仅由字母和数字组成,构成简单,从软件设计成本考虑无需采用ANN或SVM,因此本文采用模板匹配算法对信号设备名称进行识别。
3.4.1 算法原理
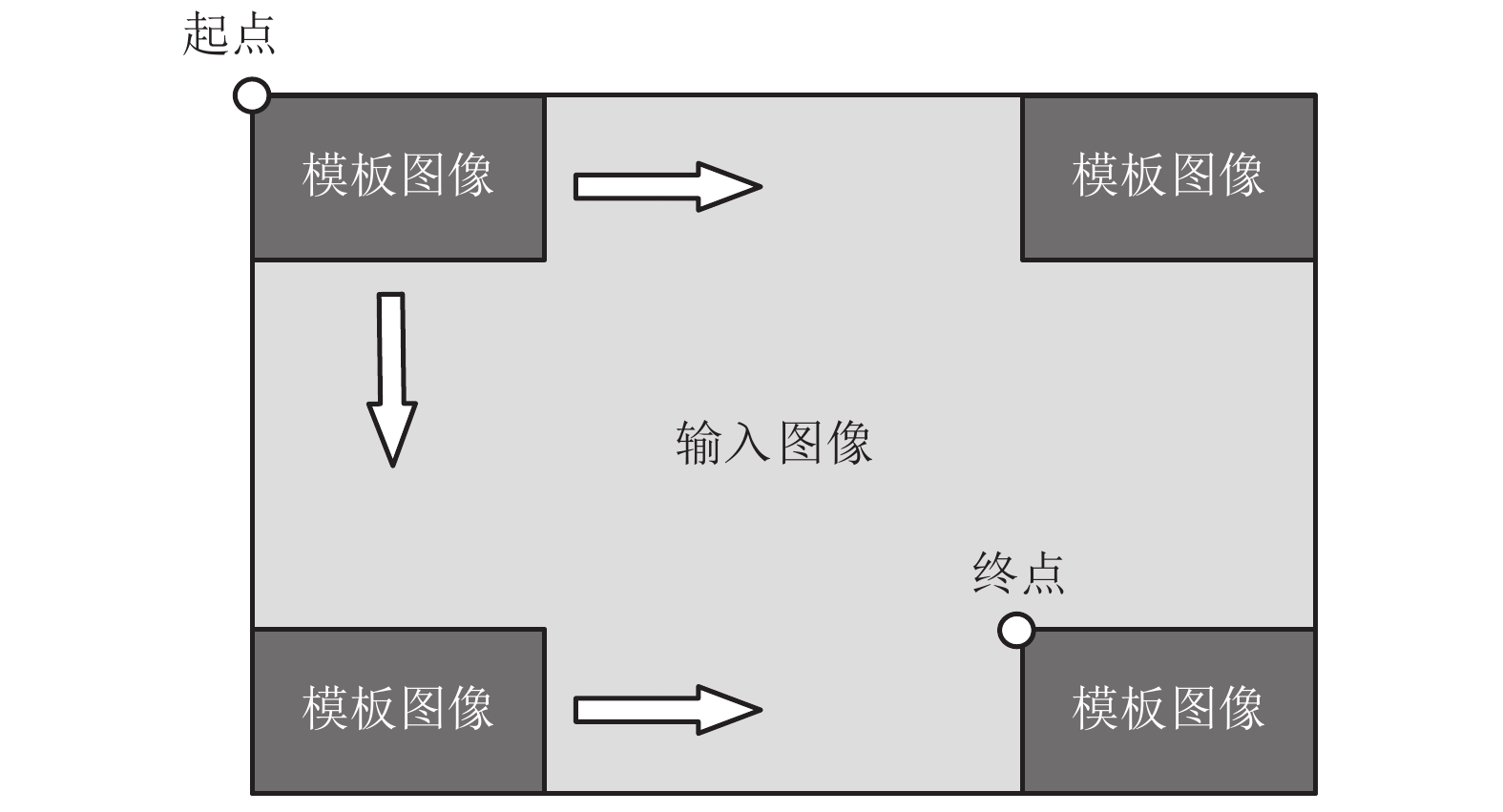
匹配原理示意,如图6所示,用模板图像在输入图像中从左到右,从上到下进行遍历,并在遍历过程中实时计算匹配度,匹配度越大则模板图像与输入图像相同的可能性越大。
3.4.2 归一化相关系数匹配
OpenCVSharp中提供了cv::matchTemplate()函数来实现匹配度计算,归一化相关系数匹配法是该函数所支持的匹配方式之一,当模板图像与输入图像完全匹配时结果为1,完全负相关匹配时结果为−1,完全不匹配则结果为0。
相关系数匹配使用原图像与其均值的差、模板图像与其均值的差二者之间的相关性进行匹配,并在该基础上做了归一化处理,匹配度R(x,y)的计算,如式(1)所示。
R(x,y) = \frac{{\displaystyle\sum\limits_{x',y'} {{\boldsymbol{T}}(x',y') \cdot I(x + x',y + y') - \frac{1}{{w \cdot h}}\displaystyle\sum\limits_{x',y'} {{\boldsymbol{T}}(x',y') \cdot \displaystyle\sum\limits_{x',y'} {{\boldsymbol{I}}(x + x',y + y')} } } }}{{\sqrt {\displaystyle\sum\limits_{x',y'} {{{\boldsymbol{T}}^2}(x',y') - \frac{1}{{w \cdot h}}{{\left( {\displaystyle\sum\limits_{x',y'} {{\boldsymbol{T}}(x',y')} } \right)}^2}} } \cdot \sqrt {\displaystyle\sum\limits_{x',y'} {{{\boldsymbol{I}}^2}(x + x',y + y') - \frac{1}{{w \cdot h}}{{\left( {\displaystyle\sum\limits_{x',y'} {{\boldsymbol{I}}(x + x',y + y')} } \right)}^2}} } }} (1) 式中:
T与 I 分别为模板图像与原图像的矩阵;
R(x,y)为匹配度;
(x,y)为当前遍历区域在 I 矩阵中左上角元素坐标; T(x’,y’)为 T 矩阵中对应坐标的元素值;
I(x’,y’)为 I 矩阵中对应坐标的元素值;
w与h分别为模板图像的宽与高。
对于T 覆盖在I上的每个位置,将产生一个匹配度R(x,y),并保存在结果矩阵R中。当 I 被 T 遍历完毕时,需要使用cv::minMaxLoc()寻找R中的最大值,该值越接近于1,匹配效果越好。应用模板匹配算法实现信号机名称识别示例,如图7所示。
4 自动提取站场数据
4.1 流程设计
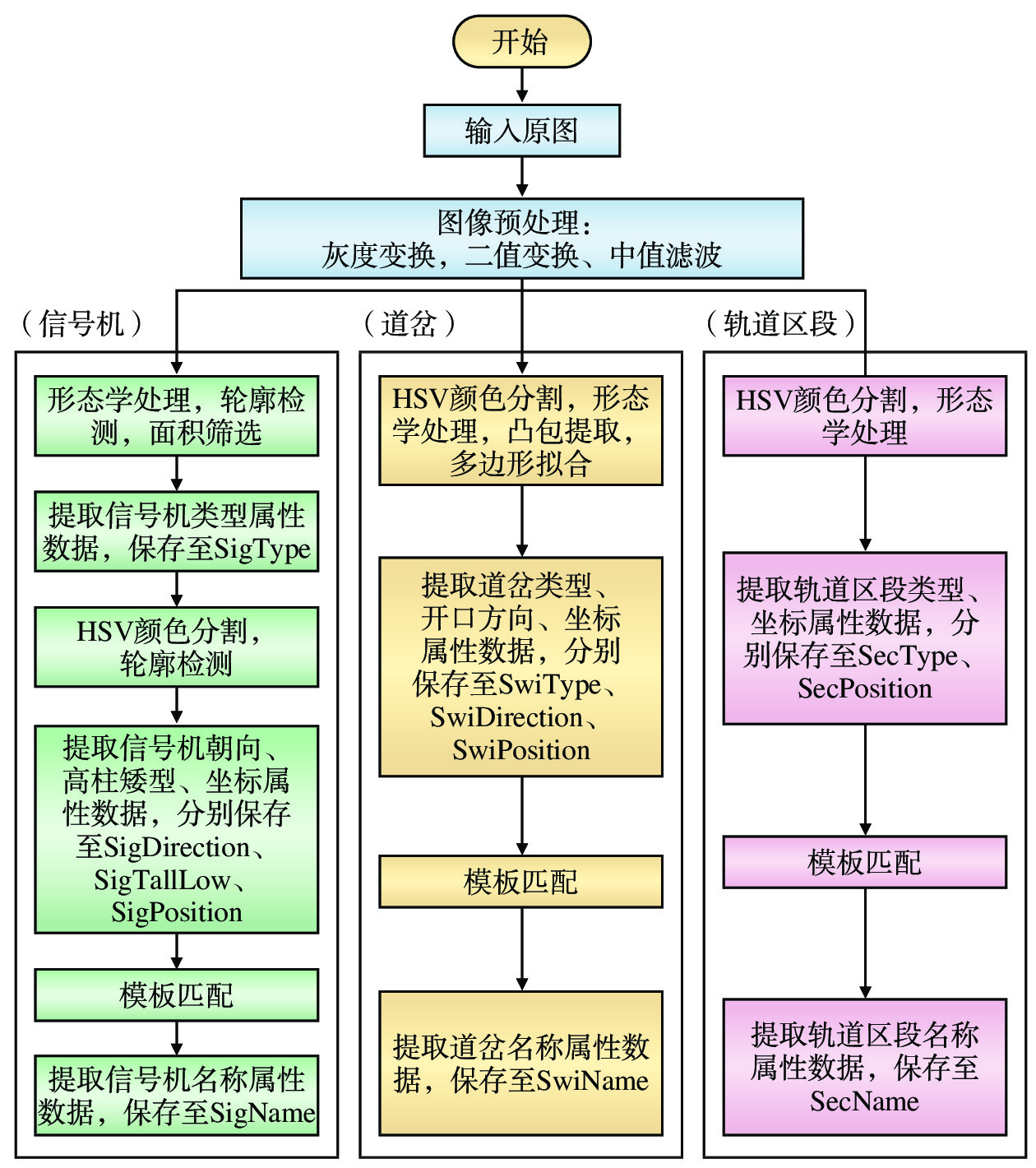
综合上述内容,现设计信号机、道岔和轨道区段的识别与数据提取流程,如图8所示。向图像识别系统输入上位机界面图像后,通过图像预处理,对图像进行灰度变换、二值变换和中值滤波;针对不同信号设备分别进行识别处理,提取相关属性数据并进行保存。
其中,不同的信号设备,识别算法的应用也有所不同。
(1)信号机(包含基座、灯柱、灯位)整体而言对颜色敏感度不高,且由于灯位之间的间隙问题,在对其进行识别时:①需要应用形态学处理实现连通化,随后对连通区域进行轮廓检测与面积计算,筛选出符合条件的连通域,此时由于列车信号机与调车信号机面积的差异性可确定出信号机类型属性SigType;②由于信号机基座与禁止灯光的颜色特征较为明显,可采用HSV颜色分割技术提取基座中心与禁止灯光中心坐标,并对二者加以判断可确定出信号机朝向SigDirection与坐标属性SigPosition,再通过轮廓检测计算连通域长度便可确定高柱、矮型属性SigTallLow;③利用模板匹配算法提取信号机名称属性SigName。
(2)道岔在界面中的颜色特征明显,对其进行识别时:①采用HSV颜色分割技术将道岔从界面中分离出来,可减少其他图元信息的干扰;②运用形态学处理实现道岔线段的修复,再使用凸包提取与多边形拟合可确定出道岔类型SwiType、开口方向SwiDirection与坐标属性SwiPosition;③利用模板匹配算法提取道岔名称属性SwiName。
(3) 轨道区段部分处理同道岔:①采用HSV颜色分割技术将轨道区段与绝缘节从界面中分离出来,运用形态学处理将断连直线段合并为长轨条,并将绝缘节重绘至长轨条实现轨道区段的正确划分;②设计处理逻辑实现轨道区段类型SecType与坐标属性SecPosition的提取;③利用模板匹配算法提取轨道区段名称属性SecName。
4.2 软件实现结果与分析
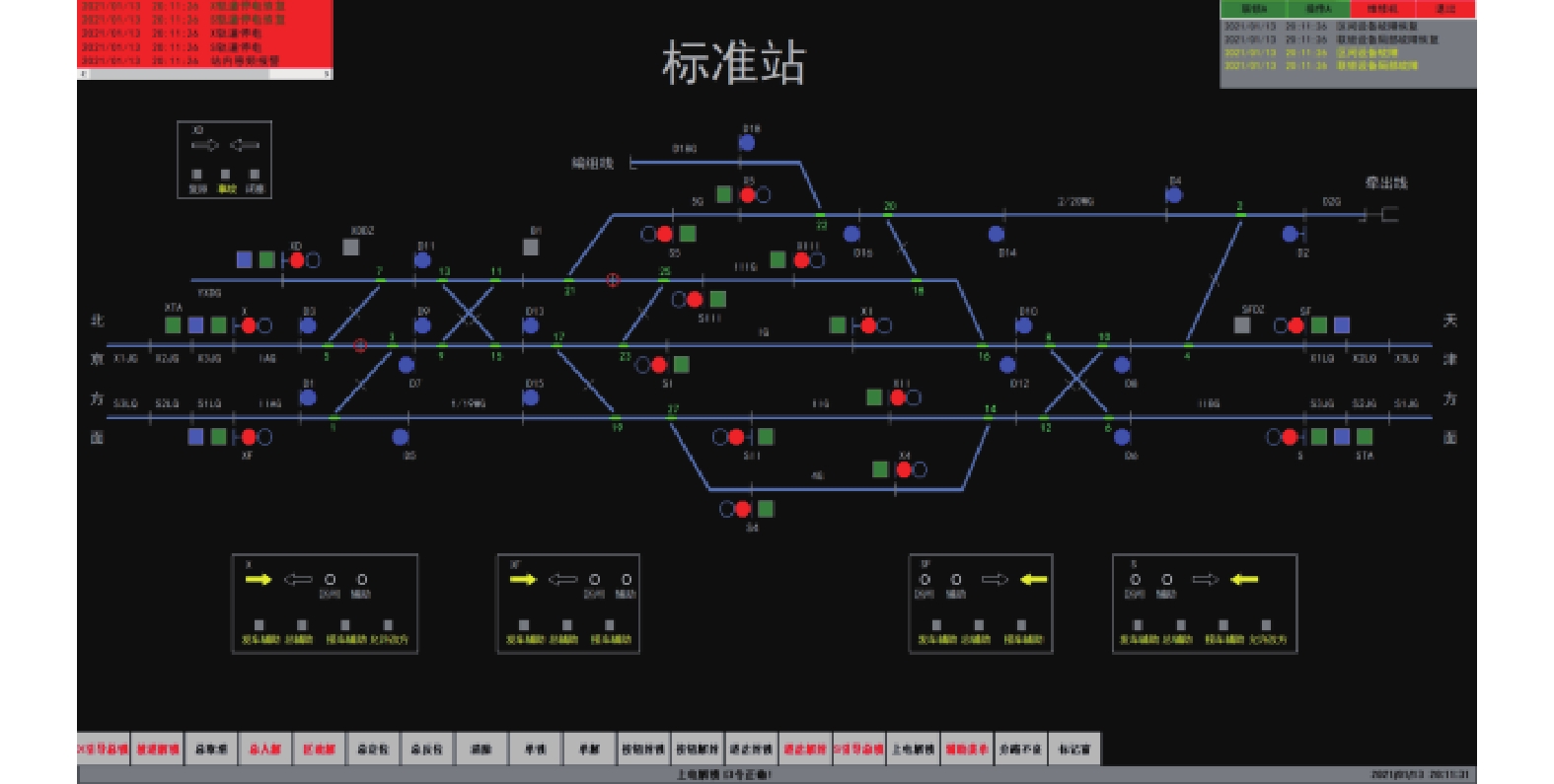
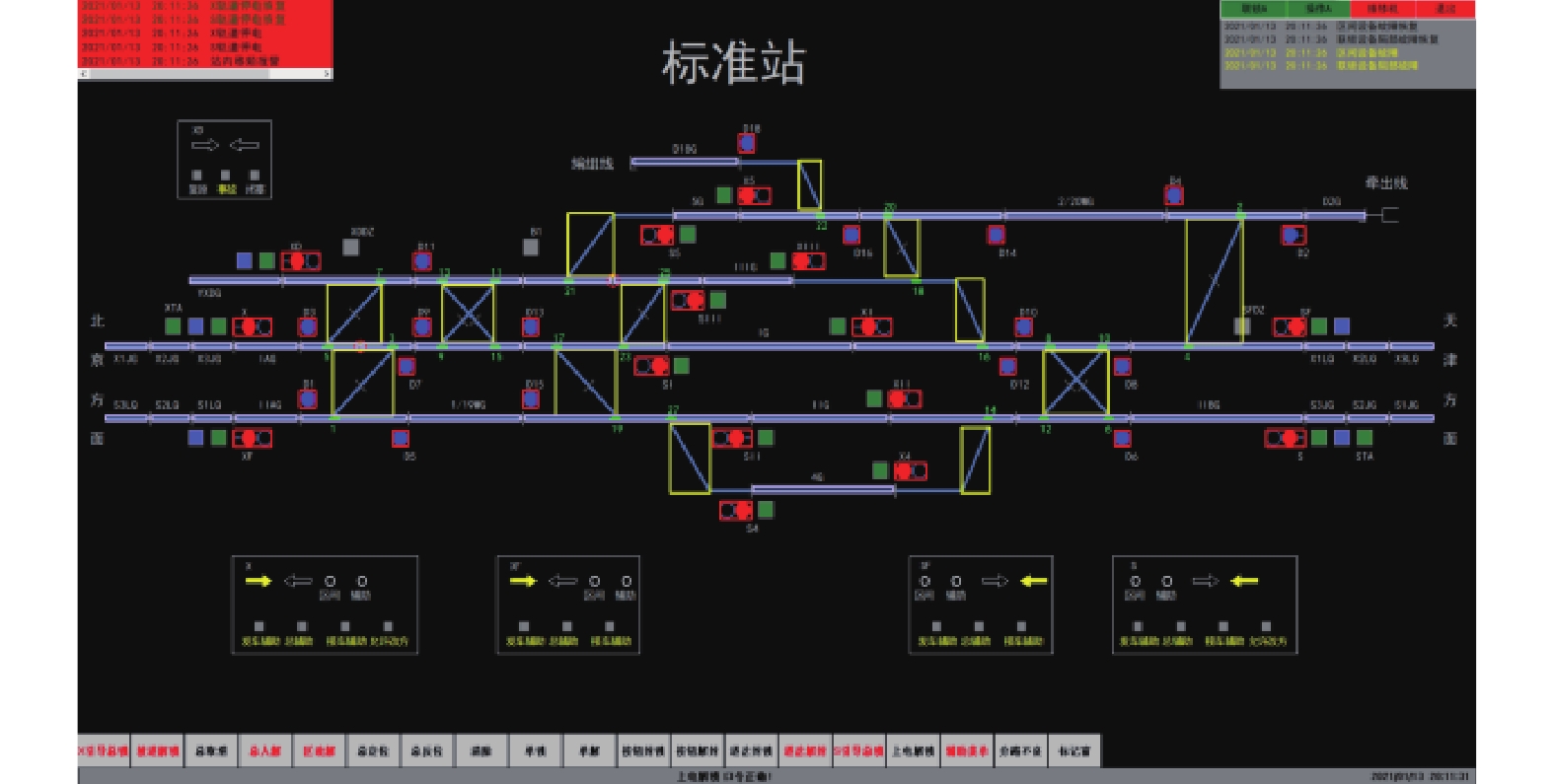
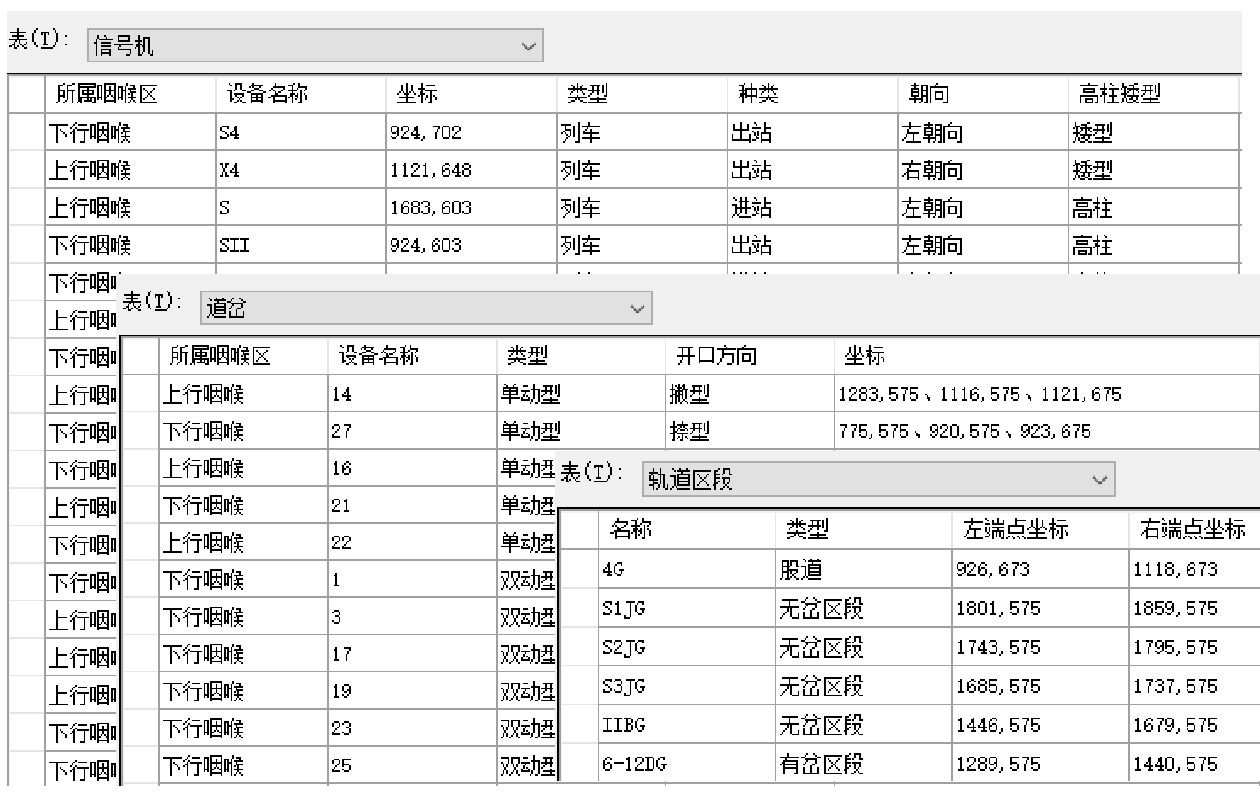
根据上述站场数据自动提取方法,在Visual Studio 2017环境下,采用C#语言开发了铁路站场数据自动提取软件。软件输入原图像,如图9所示。信号设备识别与站场数据提取结果,如图10、图11所示。通过识别测试,获得软件识别率,如表2所示。从识别效果来看,当设备名称与设备本体相连时,由于粘连问题,识别结果会产生较大误差。此时可考虑进一步分割图像,增加识别准确性。
表 2 信号设备识别率设备种类 识别率 信号机 93.2% 道岔 95.6% 轨道区段 98.1% 5 结束语
本文提出了一种铁路站场数据自动提取方法,基于图像识别技术,实现了联锁上位机界面中信号机、道岔以及轨道区段的识别与属性数据提取。经实验验证,该方法可解决计算机联锁自动测试软件所需的站场数据依赖人工手动输入的问题,但当设备名称与设备本体相粘连时,软件识别结果会产生较大误差,此时还应根据实际情况做进一步调整。
-
表 1 信号设备主要显示特征
设备种类 类型 特征 信号机 列车型 面积:100π+50 禁止灯光:红色 调车型 面积:50π+50 禁止灯光:蓝色 道岔 单动道岔 线条颜色:浅蓝色 凸包形状:三角形、梯形 双动道岔 线条颜色:浅蓝色 凸包形状:斜直线 交叉渡线 线条颜色:浅蓝色 凸包形状:菱形 轨道区段 股道 线条颜色:浅蓝色 上、下方设有列车信号机 无岔区段 线条颜色:浅蓝色 轨条内无道岔状态表示块 道岔区段 线条颜色:浅蓝色 轨条内含道岔状态表示块  下载: 导出CSV
下载: 导出CSV
-
[1] 杨 扬. 车站信号控制系统[M]. 成都: 西南交通大学出版社, 2012. [2] 李文涛. 计算机联锁系统自动测试系统研究 [J]. 铁路通信信号工程技术,2021,18(1):1-5. DOI: 10.3969/j.issn.1673-4440.2021.01.001 [3] 张铭瑶,王燕芩,李卫娟,等. 形式化自动测试在计算机联锁系统中的应用研究 [J]. 铁道通信信号,2021,57(10):6-11. [4] 任丽霞. 计算机联锁软件的黑盒测试过程分析与实现 [J]. 铁路计算机应用,2018,27(2):39-43. DOI: 10.3969/j.issn.1005-8451.2018.02.012 [5] 吴 琼,鲁剑锋,杨 璘,等. 计算机联锁与高铁信号仿真测试平台的接口和测试技术研究 [J]. 铁道通信信号,2021,57(3):37-41. [6] 黄孝章,刘双双. 铁路站场平面图CAD系统中图形信息的自动识别和提取方法 [J]. 交通与计算机,1998(2):53-57. [7] 杨若瑜,胡 笳,蔡士杰. 工程图对象识别规则自动获取方法的研究 [J]. 计算机学报,2003(10):1234-1240. DOI: 10.3321/j.issn:0254-4164.2003.10.003 [8] 张天祖,吕兴寿. 铁路站场平面图中主要元素的自动识别算法 [J]. 兰州交通大学学报,2013,32(4):124-127,163. DOI: 10.3969/j.issn.1001-4373.2013.04.027 [9] 中国铁路总公司. 车站计算机联锁操作显示技术规范: TJ/DW188-2016[S]. 北京: 中国铁路总公司, 2016. [10] 王文杰,杨 扬,王 玥. 基于OpenCV的计算机联锁上位机界面图像分析法 [J]. 铁路计算机应用,2021,30(8):17-23. DOI: 10.3969/j.issn.1005-8451.2021.08.04 [11] 王丛政,李启光. 基于Opencv的图像多目标模板匹配算法 [J]. 电子技术与软件工程,2018(5):57-59. -
期刊类型引用(4)
1. 柳新. 泰国联锁数据自动生成工具的研究与实现. 铁路通信信号工程技术. 2024(04): 109-115 .  百度学术
百度学术
2. 刘浩德,陈峰,杨岳. 基于三维场景的铁路车站列车运行联锁控制仿真研究. 铁道科学与工程学报. 2024(04): 1345-1354 . 百度学术
3. 何顶,刘重均,邹瑶,董妍,苏琛. 计算机联锁试验综合管理系统的分析与应用. 铁路通信信号工程技术. 2024(10): 22-28 . 百度学术
4. 孙屹枫. 信号设计软件集成平台设计与实现. 铁路技术创新. 2024(06): 64-71 . 百度学术
其他类型引用(1)


计量
- 文章访问数: 163
- HTML全文浏览量: 87
- PDF下载量: 32
- 被引次数: 5
