

BDS-3 precise point positioning applied to railway survey
-
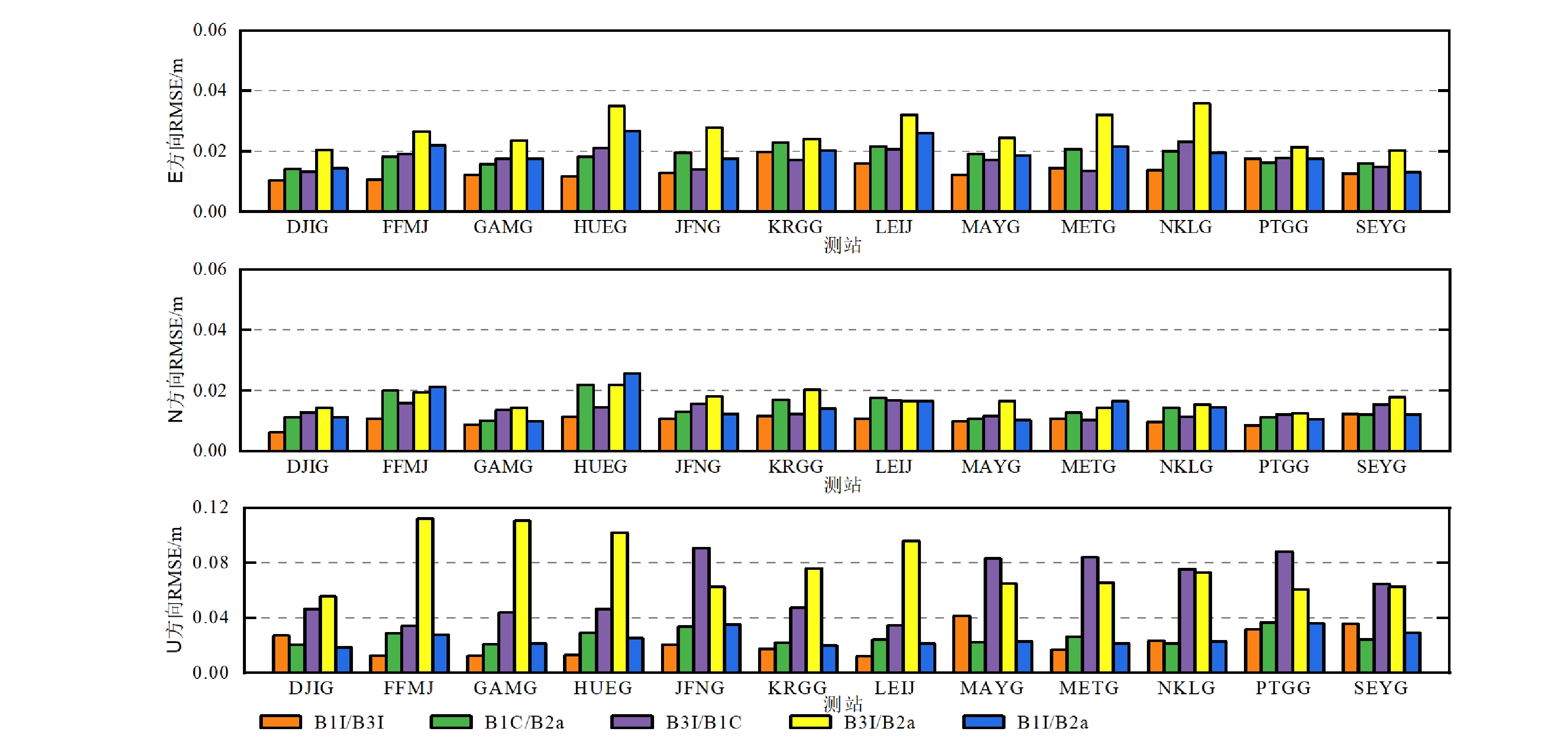
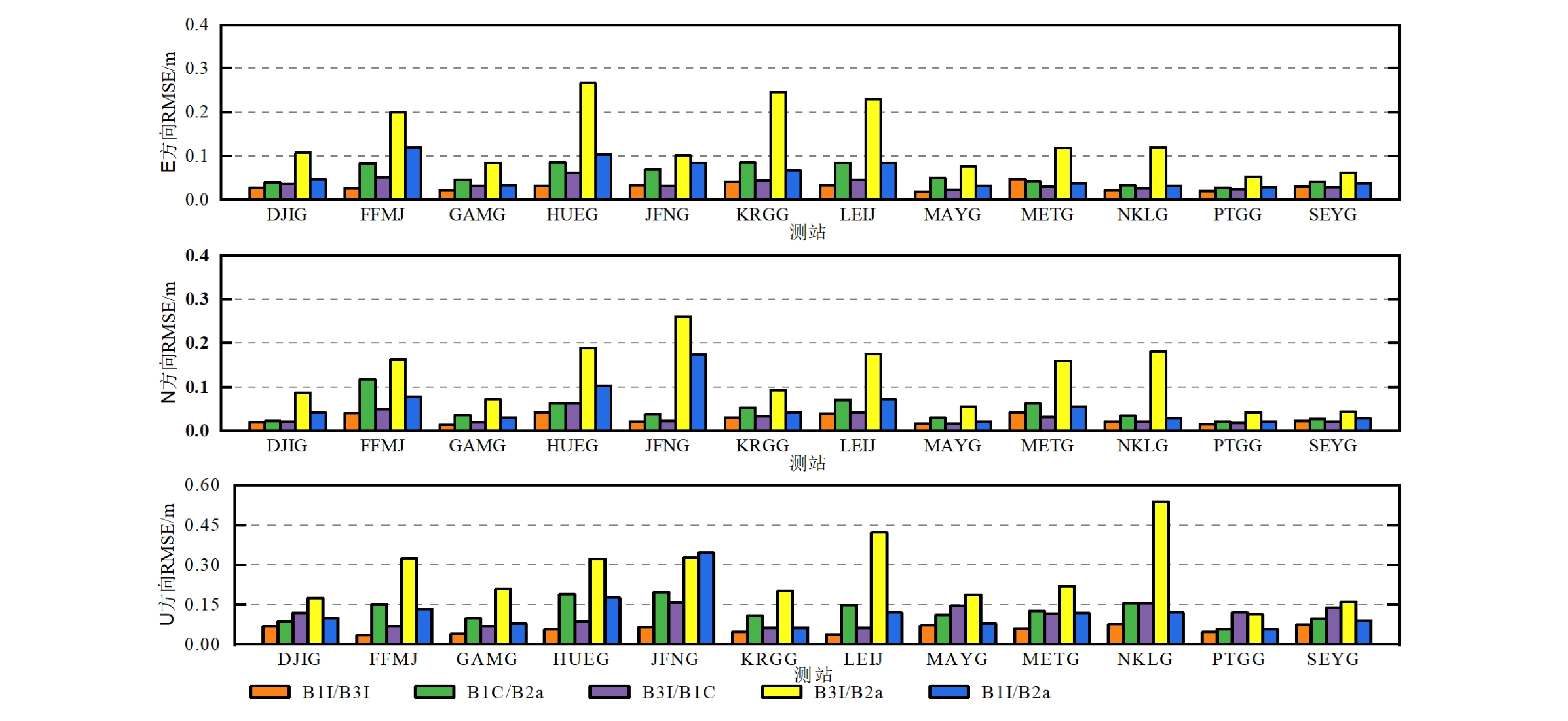
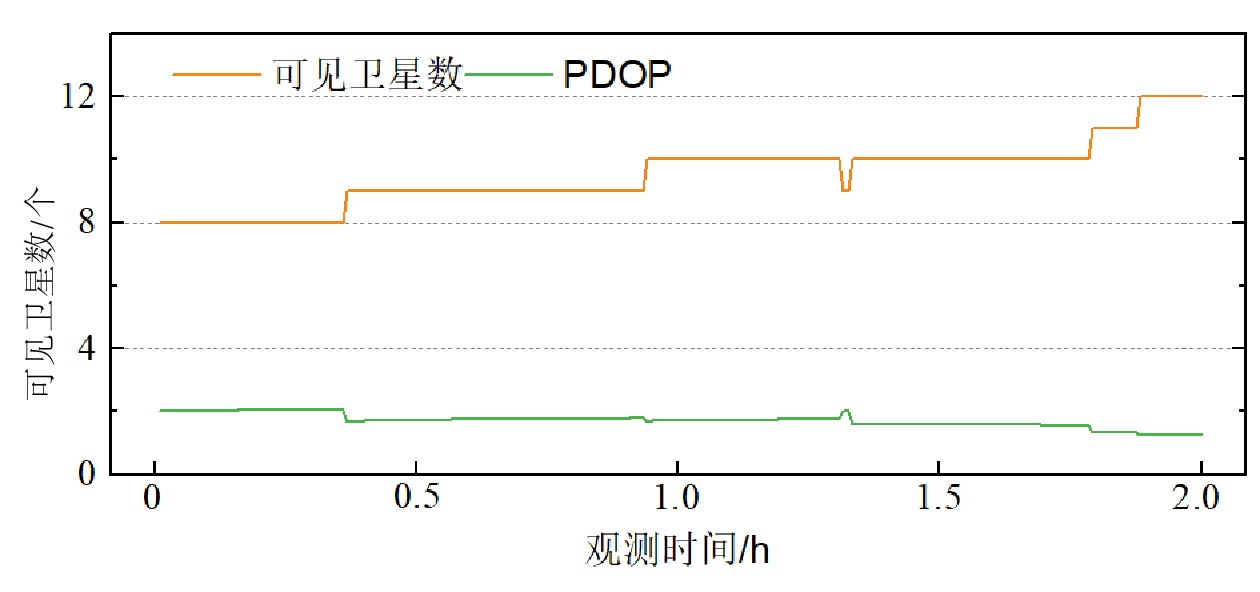
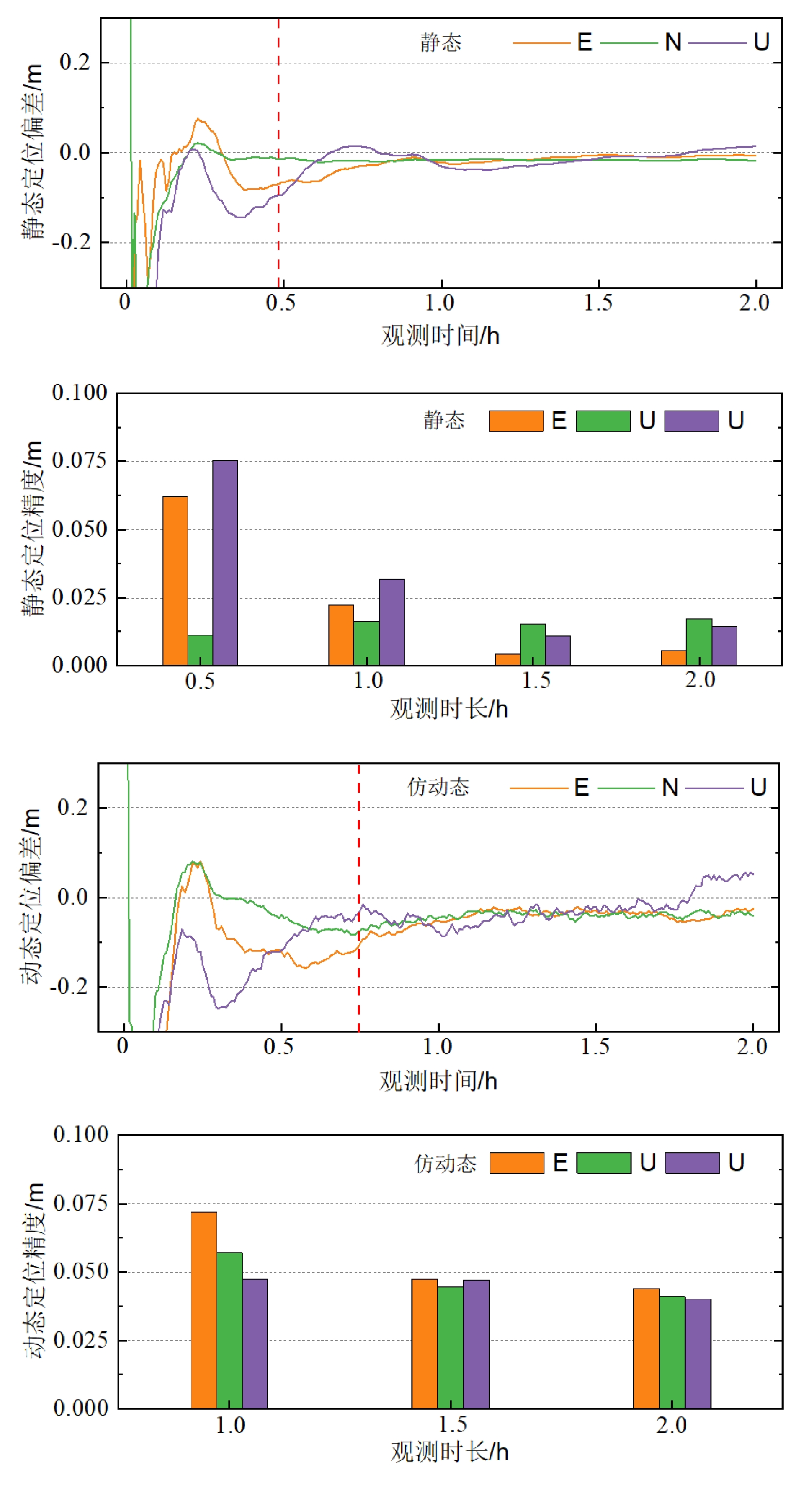
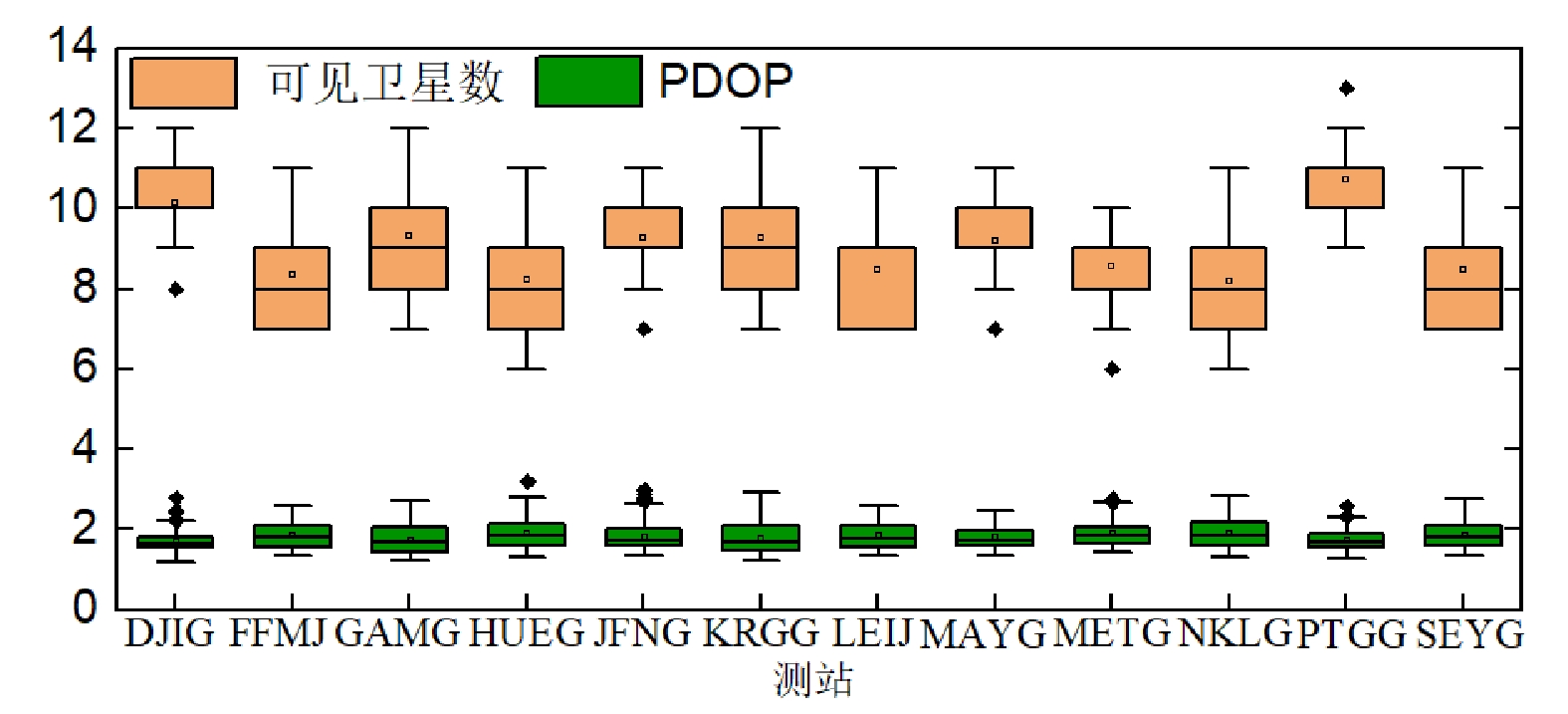
摘要: 为研究第三代北斗卫星导航系统(BDS -3,BeiDou Navigation Satellite System-3 )精密单点定位技术(PPP ,Precise Point Positioning)在铁路勘测应用中的可行性,文章推导了BDS-3任意双频非差非组合PPP通用函数模型,并采用该模型对BDS-3卫星B1I、B3I、B1C和B2a信号形成的5种双频组合进行PPP解算和性能分析,利用某铁路观测数据,对BDS-3进行PPP解算。结果表明, 所有观测时段内可见卫星数约为7~11颗,空间位置精度因子(PDOP,Position Dilution of Precision)值约为2.0,可见卫星数较多,且空间几何分布良好;在静态和仿动态解算模式下,在水平和高程方向均可实现厘米级的定位精度。该研究可为BDS-3精密单点定位技术在铁路勘察中的应用提供参考。Abstract: In order to study the feasibility of BeiDou Navigation Satellite System (BDS)-3 Precise Point Positioning (PPP) in railway survey application, this paper used BDS-3 satellite observation data to deduce BDS-3 arbitrary dual-frequency undifferenced and uncombined PPP universal function model. By using this model, the paper carried out the PPP solutions and performance analysis of five dual-frequency combinations formed by BDS-3 satellite signals B1I, B3I, B1C and B2a, and used a railway observation data to calculate BDS-3 PPP. The results show that the number of visible satellites is about 7~11, and the spatial Position Dilution of Precision (PDOP) is about 2.0 during the observation period. The number of visible satellites is large and the spatial geometry distribution is good. BDS-3 can achieve centimeter-level positioning accuracy in both horizontal and elevation directions in static and pseudo-dynamic solution modes. This study can provide reference for the application of BDS-3 precision point positioning technology in railway survey.
-
北京2022年冬奥会和冬残奥会(简称:冬奥会)是3赛区联动、以高速铁路为主要运输方式的冬季奥运盛会。北京—张家口高速铁路(简称:京张高铁)是办好2022年冬奥会的关键基础设施。为满足多国政要、运动员、媒体、观众等人群在冬奥会期间的出行需求,彰显科技冬奥会理念,研究京张高铁智能化服务技术势在必行。
为提供便捷、温馨、舒适、安全的出行服务环境,融合京张文化、中国文化、高铁元素的京张特色的北京冬奥会全方位新体验,迫切需要解决乘客需求多元、语言体系多样、站车服务协同、安全要素复杂、平赛资源统筹等条件下,京张高铁智能化服务(高铁运营)与冬奥会科学办赛/观赛之间的匹配适配、协同联动、绿色可持续等关键问题。在票务方面,目前,铁路客票发售与预订系统(简称:客票系统)主要面向国内旅客,其国际化售票、多场景智能化服务能力有待提升。因此,需面向京张高铁冬奥会多元运输需求,研究适应冬奥会出行场景下的高铁票务新模式。
1 铁路新一代客票系统票务模式
截止2018年,铁路新一代客票系统经过6次大规模迭代建设,实现了互联网/手机App售票和全国铁路实名制售票,提供线上、线下两类销售渠道。线上以12306互联网售票系统(简称:12306)网站和12306手机App为主,线下提供车站窗口、自助售票机、电话订票等渠道,实现了互联网交易排队、资源分区、分节点分库分表、售取分离、读写分离等系统架构的技术提升[1],提高了互联网售票能力,实现了现金、银行卡、中铁银通卡及第三方支付的乘车票款支付方式,同时,开通了中国铁路12306客户服务中心。此外,还建设了客运管理系统,满足在途列车监控、客运组织与生产作业管理、列车办公与服务管理、安全应急、客运人员管理等业务在内的功能需求[2]。
1.1 票制电子化实践
在票制方面,初步进行了客票电子化实践,支持网上购买部分高铁车次的旅客持二代身份证进/出站。自2017年春运起,部分车站开始部署基于人脸识别的实名制核验闸机,应用效果良好,提升了中国铁路客运服务水平、服务质量和管理水平,推动了铁路客运营销从传统方式向电子商务的转变[3]。其服务模式如图1所示。
1.2 新一代客票系统存在的问题
高铁车站二代身份证进/出站服务是对铁路电子客票进行的积极尝试,但线上售出的车票除部分高铁车站部分车次外,其余均需换取纸质车票后才能乘车。存在以下需要解决的问题:
(1)在电子客票的生命周期方面,旅客换取纸质车票后,原电子客票的生命周期随即失效,退签、进出站等后续业务均无法再通过电子客票办理;
(2)在发售渠道方面,仅支持线上渠道购买部分高铁车票的旅客持二代身份证进出站,对于在线下渠道购买的车票和普速列车的车票,尚无法为旅客提供电子客票服务;
(3)在线上线下部分业务互通方面,线上只能为线上购买的还未换取纸质车票的电子客票办理退签等变更业务,而在线下购买的车票则无法在线上办理退签等变更业务;
(4)在旅客行程服务信息方面,12306只是为线上购票用户建立了铁路唯一账户,用户能随时查看自己在线上购买的车票、预订的餐饮及其他服务产品。客票系统没有为铁路旅客建立唯一的账户,因客票系统的集中分布架构,数据分散在中国国家铁路集团有限公司(简称:国铁集团)、铁路局集团公司和车站多级服务器中,跨网络、跨服务器访问不便,导致旅客无法掌握自己的全行程及相关服务信息,铁路无法快速掌握旅客出行的过程信息,难以提供精准服务,也无法与其他客运业务系统高效共享数据。
2 电子客票全行程出行票务模式
2018年,国铁集团提出“精品工程、智能京张”的建设目标,部署了多项研究任务,全力组织推进实施,瞄准世界铁路科技发展前沿,持续加大关键领域技术创新力度,开启了我国铁路电子客票时代。铁路电子客票以客票载体电子化为手段,简化旅客出行流程,为旅客提供无纸化、自助化、线上线下体验一体化的出行服务[4],提高出行体验,并通过全行程服务信息的分布式采集和集中式存储,为客运大数据分析和智能化经营管理提供数据支撑。
2.1 基于旅客服务记录的电子客票服务
铁路12306对乘车人所购车票和服务信息进行整合,实现服务进度或变更信息实时更新和完整轨迹记录,形成旅客服务记录(PSR,Passenger Service Record)[5]。PSR实现了以旅客身份信息为核心,以铁路部门客运服务和第三方保险、约车、餐饮、住宿、旅游及其它定制化服务信息为外延的旅客全行程服务档案,为后续开展精准营销和服务奠定坚实基础,还可与其他交通方式联动,为实现综合交通出行一票制奠定技术基础,其服务模式如图2所示。
车票销售阶段,旅客在出行前从12306网站、12306手机App、人工窗口、代售点、自动售票机(TVM,Ticket Vendor Machine)及电话订票等渠道购买电子客票,购票成功后,旅客将收到铁路部门推送的电子客票通知信息。
(1)使用电话订票的旅客,完成预订后,在车站窗口、代售点窗口、TVM上支付,完成电子客票购买,后续制票流程与在线下渠道购票保持一致;
(2)在车票变更环节,12306网站及12306手机App向经过强化用户身份认证的旅客,提供线上办理本人作为乘客的线下车票变更的功能。如果旅客购票时使用电子支付,票款在扣除相关费用后,可自动退回原卡或支付账户;如购票时使用的是现金,退票时,铁路部门将为旅客提供票款留存服务,并以短信、微信、邮件等形式向旅客发送退票通知单,在全国任意车站的退票窗口均可领取;
(3)在身份核验环节,旅客在办理12306账户注册或强化用户身份认证等需要核验用户身份的业务时,可通过线下刷身份证或线上进行人脸比对的相应功能完成身份核验;
(4)在报销凭证服务方面,铁路部门为旅客提供方便领取报销凭证的渠道,原有的纸质车票不再作为乘车凭证(在过渡期间,仍作为报销凭证)。
2.2 高并发条件下的电子客票检票服务
高铁发车密度大、单趟列车旅客数量多、短时客流积聚非常明显,铁路在实名制条件下为旅客提供了便捷顺畅的进/出站服务。
(1)在实名制进站环节,旅客使用可自动识读证件,可通过自助实名制核验设备进站。如果旅客使用不可自动识读证件,或有儿童随行等情况,通过人工实名制进站核验窗口进行人工核验;
(2)在进站乘车环节,旅客持可自动识读证件或12306手机App上的二维码,在自助检票机完成检票乘车,旅客持不可识读身份证件,可通过人工检票口检票乘车[6];
(3)电子客票通知方面,旅客在进站和候车的过程中,可凭有效身份证件从车站窗口或自助设备上查询电子客票信息、打印电子客票通知单;
(4)在进站补票环节,对于在进站时需要补票的旅客,铁路部门为旅客提供电子客票补票服务,旅客按照铁路相关规定完成补票后,可继续进站。
2.3 基于站车无线交互系统的车上查验服务
优化列车服务子系统车票查验功能。提供列车席位可视化查验功能,突显铁路常旅客、重点旅客并实现核查登记。实现了11种证件的自动读取及二维码扫描车票查验,提高了站车交互平台[7]的能力和稳定性。实现了第1生产中心、第2生产中心站车交互平台双4G通道;扩容中国移动网络通道并增加接入负载、增加中心交互网络带宽;实现了多层次故障隔离和切换,优化无线网络通信协议,增强地面系统处理能力。
2.4 线上线下一体化信息集成平台
为实现线上线下一体化旅客服务,研制了涵盖数据同步服务、数据共享服务及交易服务集成的线上线下一体化信息集成平台,主要提供以下功能:
(1)数据同步服务,对PSR、应急等数据同步功能进行优化,确保在出现异常情况时,数据和同步状态依然保存在源端,不会造成数据丢失;
(2)数据共享服务,实现与客运服务系统、客运管理系统、延伸服务系统、行包系统的数据共享。在数据共享接口实现对敏感身份信息、出行信息的加密处理,通过授权可以解密查看详情;
(3)交易服务集成,包括PSR集群、人脸比对集群及电子客票识别码集群,用于查询、更新、存储旅客全行程信息;在线人脸照片特征值抽取、比对、搜索及人脸信息存储;在线电子客票识别码生成、解密。
2.5 客运产品设计和售票组织智能化
2.5.1 票额智能预分
以客流分析和预测为基础,在预售期外对席位进行合理配置,在预售过程中根据销售进展和客流情况进行动态调整,实现席位资源和客流需求的最佳匹配。票额智能预分核心功能包括列车站间客流预测和票额自动分配[8-9]。在数据方面,采用预售数据结合历史数据,建立海量数据样本训练模型,增强预测实时性;在技术方面,利用大数据技术分析旅客信息和售票数据,融合线下的沙盘演练数据区与线上的预测算法区,构建客流预测系统,通过建立时间序列、线性回归、指数平滑等适合不同场景的预测模型,实现列车客流OD预测、车站客流OD预测、票额智能预分,为全国铁路的发送量提供科学预测[10]。
2.5.2 开行方案动态优化
在客流预测基础上,结合运力资源配置情况,对旅客列车的运行区段、运行径路、列车种类、开行对数、编组内容、停站和动车组运用方案进行动态优化调整。京张高铁开行方案动态优化方案,基于多模态的铁路客票大数据,融合实时流计算、多源异构、混合数据仓库等技术,运用群体智能理论与方法,攻克了大尺度空间、细颗粒度、复杂场景下的客流预测技术难题,创建了点线面联动的评价指标体系,运用自主研发的客流预测、列车效益评估、开行方案评价、旅客选择行为分析等运营动态监测及分析技术,持续开展客运产品迭代优化设计,大幅缩短了运力配置和调整的周期。
以可识读身份证件和动态二维条码为载体的电子客票应用逐步成熟,目前,已在全国铁路得到全面应用。通过采用电子客票载体替代传统纸质车票,实现旅客的无纸化出行,不仅免去了旅客进站前的取票环节,也为铁路运输企业节约了大量的票纸成本[4]。但冬奥会期间票务需求呈现多元化、国际化特征,因此,客票系统需进一步进行智能化提升。
3 京张高铁冬奥会多元票务需求分析
冬奥会期间,京张高铁客流主要为注册利益相关方和观众。其中,注册利益相关方主要包括奥林匹克大家庭成员、运动员及随队官员、国际冬季单项体育联合会成员、转播商、新闻媒体等5类;在高铁运营方面,涉及中国铁路北京局集团公司票务管理及12306国际化后台服务能力等诸多需求。
3.1 办赛观赛方
3.1.1 注册利益相关方
依据冬奥会和冬残奥会赛程[11-12],冬奥会期间,交通保障部门将为各注册利益相关方提供从冬奥会开幕式前14天(2022年1月21日)开始至冬残奥会闭幕式结束后3天(2022年3月16日)共计55天的交通服务。在开/闭幕式期间(2月4日—20日,3月4日—13日),将使用京张高铁作为跨赛区运输工具,此外,京张高铁日常将为媒体运行部预测转播商及新闻媒体提供数千次转运服务。
3.1.2 持票观众
参照往届奥运会惯例,可能存在持门票观众享受免费乘坐一个指定区间往返乘车的服务。铁路票务系统可根据冬奥会门票对应的赛事信息,关联旅客身份信息和往返乘车日期,并由旅客选择相应的出发站、到达站等信息,持票观众持身份证件(身份证或护照)通过闸机检票乘车。
3.1.3 普通旅客
京张高铁是北京至我国西北地区快速通道和京津冀地区城际铁路网的重要组成部分,既是支撑成功举办北京2022年冬奥会的交通保障线,也是促进京津冀一体化发展的服务线;既是传承京张铁路百年历史的文化线,也是全面展示中国高铁建设成果的示范线。同时,2022年冬奥会期间正逢我国春运客流高峰期,此线路同样需要承担输送大批春运客流的重任,因此,需兼顾普通旅客的出行需求。
3.2 高铁运营方
作为高铁运营方,需提供全时区国际化售票、票务运营保障和出行数据隐私保护能力。
3.2.1 全时区国际化售票服务需求
当前,铁路客票系统主要面向国内旅客,在国际化售票服务方面有待拓展,因此,加快推进客票系统的国际化建设、满足冬奥会期间京张高铁国际旅客购票需求迫在眉睫。12306网站和12306手机App需解决国内外旅客全时区服务需求,实现全时区运营服务下的综合业务监控、预警和故障态势感知;提供国际化售票服务通知能力,实现冬奥会赛时京张高铁售票需求与服务能力的匹配。
3.2.2 票务运营保障需求
京张高铁冬奥会期间将实行与赛时运输相匹配的列车开行方案,需解决跨区域冬奥会办赛模式下高铁运输资源配给与多元运输需求间的协调匹配问题;列车席位管理和票额分配需满足多种人群的多元化服务需求;针对冬季冰雪比赛容易出现的延时、变更等异常情况,在京张高铁复兴号列车超员控制要求极高的场景下,需提供预警和应急售票服务能力,实现京张高铁列车票务运营保障智能化提升。
3.2.3 出行服务数据隐私保护需求
为满足国际、国内网络安全法和个人隐私保护条例的要求,客票系统在运营过程中使用到的旅客信息必须经过严格保护,系统必须提供敏感数据在采集、使用、传输、存储、归档、销毁的全生命周期的保护能力。
综上所述,冬奥会期间京张高铁面临着多种人群的多元化出行需求,因此需通过进一步提升客票系统服务能力,构建新型票务模式。
4 京张高铁多模态智能票务模式
“多模态”概念源于上世纪末的社会符号学,强调多重符号化方式在社会互动中的交织和符号物态、符号运用者感官经验在意义生成中的重要性[13]。人类使用所有的感官,结合由其生成的神经信号来感知周围物理世界并与之交互,因此感知和交互过程呈现多模态特征。不同形式的输入方式(例如:语音,手势,触摸,凝视等)可称为多模态交互模式,其目标是提供人机交互的多种选择方式,以实现更为自然、流畅的用户服务。而票务系统发展至今,在用户交互层面,急需为用户提供全方位、多模态的感知和交互能力,提升用户体验;在运营保障方面,急需通过对多层次和多维度的复杂信息快速、有效融合,改变旅客出行信息和运输信息资源的不对称现状;在系统后台方面,急需提供与国际化、智能化相匹配的智能化算力和数据保护能力。因此,京张高铁票务在冬奥会期间面临的核心难题,是解决跨区域大型体育赛事期间,各种人群的多元化出行需求和高铁多模态票务协同问题。
本文立足于人工智能时代“多模态”的价值内涵,围绕京张高铁冬奥会多元用户需求,从多模态信息融合、多模态感知交互和多模态智能计算3个方面构建京张高铁多模态智能票务模式,提供奥运特色车票样式设计及其票制协同方案、中英文双语自动售票机、多语言售票应用软件,提升国际化售票交互体验;开展一系列支撑国际化售票服务技术的优化研究,包括多模态人像识别、双语客服等智能技术应用,增强国际化售票服务能力、冬奥会运营保障能力和数据隐私保障能力,解决跨区域赛事人群多元出行需求与高铁多模态票务协同问题,其票务模式如图3所示。
4.1 多模态信息融合
本文提出的多模态信息融合,主要是综合跨区域冬奥会举办模式带来的特定影响因素,将语言、文化等人文类信息,赛事、天气等时空演化信息,铁路电子客票全行程服务信息、多种人群(如观赛、媒体、随队官员、游客等)的多元需求信息进行多层次和多维度信息处理,提供票制票样、列车票务运营保障等的有效服务保障资源。
4.1.1 面向冬奥会全行程出行链的多元票制
对冬奥会赛时出行人群结合时空演化条件进行多元需求分析,综合跨区域冬奥会举办模式等带来的特定影响因素,构建高铁全行程出行链,提出适应冬奥会场景的单日票、计次票、储值票等多元票制;基于铁路电子客票PSR构建冬奥会旅客出行服务数据模型,支持冬奥会多元票制验/检票服务,为冬奥会不同旅客群便捷购票出行提供保障。
4.1.2 多模态信息融合的车票样式
将历届冬奥会票制和京张高铁文化、北京冬奥会文化元素进行多模态融合,研发具有冬奥会特色的车票样式,为旅客营造富含冬奥会氛围的票制体验和文化意蕴,体现以人为本的奥运精神。
4.1.3 京张高铁冬奥会票务运营保障
针对跨区域冬奥会办赛模式,基于京张高铁冬奥会期间列车开行方案,针对多种人群需求,构建列车席位管理和票额分配模型,实现高铁运输资源配给与多元运输需求间的协调匹配;针对典型交通异常情况,融合赛程、天气、客流等信息,提供京张高铁超员预警和京张高铁应急售票服务方案,实现京张高铁列车票务运营保障智能化提升。
4.2 多模态感知交互
基于多模态信息融合,扩展既有的12306前/后台感知和交互手段,利用人机工程学、语言学、服务态势感知、计算资源调度综合等技术,提供前端交互优化和后台能力支撑的智能化、国际化服务能力资源。
4.2.1 国际化购票交互优化
针对冬奥会京张高铁国际化票务服务需求,提供票务领域的双语柔性匹配翻译能力,达到专业词条翻译的“信、达、雅”;依据语种对自动售票机交互界面进行自适应控制,提供近端和远程两种双语自助购票服务模式,优化人机交互流程,提升自助售票应用体验;在12306国际版售票系统中,提供中、英、法3种语言版本,利用心理学、传播学、社会学等相关理论提高信息交互效率和用户视觉传达效能,降低国际用户学习成本。
4.2.2 国际化售票能力支撑
为解决国内外旅客时差问题,提供12306全时区票务服务,构建基于业务基线的服务态势感知模型,实现时区运营服务下全链路业务预警;对于12306售票业务存在高低峰场景切换的现状,提供两种场景下不同的运行机制,并结合服务态势感知对售票服务资源进行智能调度;针对国外旅客常用联系方式与国内不同的现状,提供邮件、短信、微信等多渠道融合的服务通知,增强票务服务交互手段,支撑国际化售票服务。
4.3 多模态智能计算
基于深度学习、知识图谱、客户画像等技术,提供多模态融合的人像识别计算、面向铁路领域的双语智能客服和隐私保护计算能力,为多模态感知和交互提供算力和算法支撑。
4.3.1 多模态人像识别计算能力
提供多模态人像识别计算能力支撑。通过对深度图、彩色图分别进行基础特征提取,进行多模态特征融合、高层特征提取、全连接,得到多模态融合特征值;基于冬奥会旅客结构比例构建数据集,进行多肤色人像识别;基于深度学习,对旅客在面部有遮挡物或光照不足、集中行进等条件下的图像质量进行分析择优,实现多模态、多肤色、多模型融合的旅客人像识别,为旅客进/出站、验/检票应用提供支撑。
4.3.2 多模态智能客服计算能力
构建双语铁路客服语料库,进行铁路专用词条优化,提供铁路票务客服中英双语语音识别和语义理解的计算能力。基于知识图谱构建客服知识库,开发相应的检索技术,提升检索效率和精度;基于冬奥会旅客出行服务数据模型,研发个性化客服方案生成技术,强化双语智能客服能力。
4.3.3 旅客隐私保护能力
针对冬奥会旅客出行服务数据,构建敏感数据发现与审计模型,研究敏感信息识别、分类和提取等关键技术;定义敏感应用数据控制规则,构建敏感数据自适应采集处理模型;分析敏感数据在网络传输中的保密性和完整性,构建敏感数据全链路安全传输模型;识别标识数据的脱敏特征,构建动态脱敏存储模型,增强客票系统旅客隐私保护能力。
5 结束语
京张高铁多模态智能票务模式是基于铁路电子客票,从冬奥会京张高铁多元用户需求出发,研究多模态票务服务应用架构,综合应用跨区域冬奥会场景下的京张高铁多模态票务服务关键技术,形成售票、验票、检票及客服全行程国际化票务服务闭环,通过自动售票机英文版购票、12306网站及12306手机App英文版购票应用软件、构建京张高铁国际化售票服务,进一步提升京张高铁票务智能化水平。本研究有利于后奥运会时代京张高铁的运营质量提升和沿线绿色发展,也为以高铁为主要运输通道的跨区域大型赛事提供了有意义的票务解决方案。
-
表 1 5种双频组合12个测站静态解平均RMSE和收敛时间
组合频点 定位精度RMSE/cm 收敛时间/min E N U B1I/B3I 1.4 1.0 2.2 37 B1C/B2a 1.9 1.4 2.6 103 B3I/B1C 1.7 1.4 6.2 72 B3I/B2a 2.7 1.7 8.0 205 B1I/B2a 2.0 1.5 2.5 87  下载: 导出CSV
下载: 导出CSV
表 2 5种双频组合12个测站动态解平均RMSE和收敛时间
组合频点 定位精度RMSE/cm 收敛时间/min E N U B1I/B3I 3.0 2.7 5.7 49 B1C/B2a 5.7 4.8 12.8 182 B3I/B1C 3.7 3.0 10.9 126 B3I/B2a 18.9 15.6 32.6 332 B1I/B2a 5.8 5.6 12.1 194
下载: 导出CSV
-
[1] 李 杨, 高淑照, 惠晨亮, 等. BDS在铁路工程测量应用中的精度分析[J/OL]. 导航定位学报, 2022(04): 1-10[2022-02-24]. http://kns.cnki.net/kcms/detail/10.1096.P.20211207.1950.002.html. [2] 陶 灿, 曹成度, 滕焕乐, 等. 基于单一北斗二代系统的高速铁路CP0框架控制网基线解算和精度分析[J/OL]. 铁道标准设计: 1-7[2022-02-24]. https://doi.org/10.13238/j.issn.1004-2954.202009150007. [3] 靳成铭,蔡伯根,王 剑,等. 铁路导航精密单点定位方法改进及性能验证 [J]. 铁道学报,2020,42(12):82-89. DOI: 10.3969/j.issn.1001-8360.2020.12.011 [4] 张小红,胡家欢,任晓东. PPP/PPP-RTK新进展与北斗/GNSS PPP定位性能比较 [J]. 测绘学报,2020,49(9):1084-1100. DOI: 10.11947/j.AGCS.2020.20200328 [5] 梅建东. GPS双频/三频静态精密单点定位精度分析 [J]. 测绘标准化,2021,37(3):37-41. [6] 郭树人,蔡洪亮,孟轶男,等. 北斗三号导航定位技术体制与服务性能 [J]. 测绘学报,2019,48(7):810-821. [7] Zhang Rui, Tu Rui, Zhang Pengfei, et al. Orbit determination of BDS-3 satellite based on regional ground tracking station and inter-satellite link observations [J]. Advances in Space Research, 2021, 67(12): 4011-4024. DOI: 10.1016/j.asr.2021.02.027
[8] 刘生锋,杨文龙,谷 涛. BDS-3双频组合精密单点定位精度分析 [J]. 测绘通报,2021(3):7-11,17. [9] 陈哲正,欧阳明俊,朱祥维,等. 北斗三号精密单点定位精度分析研究 [J]. 全球定位系统,2021,46(2):37-43. DOI: 10.12265/j.gnss.2020112701 [10] 周 锋. 多系统GNSS非差非组合精密单点定位相关理论和方法研究[D]. 上海: 华东师范大学, 2018. [11] 赵 琳,李宏宇,侯毅男,等. 多系统混频非差非组合精密单点定位方法研究 [J]. 导航定位与授时,2021,8(5):96-102.



计量
- 文章访问数: 85
- HTML全文浏览量: 28
- PDF下载量: 13
