

Fault diagnosis method of level crossing signal equipment based on Petri Net
-
摘要: 平交道口是公路和铁路的交汇点,也是事故易发点。针对平交道口安全苛求性特征,研究平交道口信号设备故障诊断方法;以Petri网为工具,对平交道口信号设备控制逻辑和过程进行建模;采用TINA仿真软件生成平交道口信号设备模型的可达图,实现对平交道口信号设备的故障诊断。该故障诊断方法的应用将有助于提升平交道口的安全性和运行效率。Abstract: The level crossing is the intersection of highway and railway, and it is also the prone accident point. Aiming at the safety critical characteristics of the level crossing, this paper studied the fault diagnosis method of the level crossing signal equipment, took Petri Net as a tool, modelled the control logic and process of the level crossing signal equipment, used TINA simulation software to generate the reachable graph of the level crossing signal equipment model, and implemented the fault diagnosis of the level crossing signal equipment. The application of this fault diagnosis method would help to improve the safety and operation efficiency of level crossings.
-
Keywords:
- level crossing /
- signal equipment /
- fault diagnosis /
- Petri Net /
- fail-safe principle
-
平交道口是铁路和公路的交汇点,一旦发生交通事故,不仅影响整个交通运营效率,还会引起严重的人员伤亡,因此,平交道口的安全性对轨道交通和公路交通至关重要。
完善的安全防护措施,既能保证行人和车辆可以预先避让列车,又能加强对道口的监护,有效地避免交通事故的发生 [1]。文献[2]研制了一款铁路平交道口预警和管理设备,该设备能够提高平交道口的管理效率,降低平交道口发生事故的概率;文献[3]在铁路平交道口设置双向智能报警系统,有效减少了平交道口交通事故的数量和交通拥堵的频次;文献[4]研究并建立了平交道口安全评价体系;文献[5]提出的多参数道口作业流程更符合实际情况,改进了多列车接车流程,并提出了接车过程中异常情况下的应对方案;文献[6]通过计算机联锁系统驱动相应报警继电器,结合DX3型道口信号设备,实现道口的自动报警,再通过延时开放信号显示的方法确保通过道口的列车、汽车、行人的安全;文献 [7]利用自主设计的AV-FMS计算机视觉系统实现对铁路平交道口的安全监测;文献[8]采用基于模型的方法对平交道口进行建模,基于模型检验的方法分析平交道口的安全性,验证了有色Petri网用于平交道口安全性分析的可行性。
本文在分析和研究前人所做工作的基础上,研究基于Petri网的平交道口信号设备故障诊断方法。
1 平交道口信号设备及其工作原理
平交道口设置于铁路与公路在同一平面交汇的地方。其适用于道路通行量低或立交无法设置的位置。
1.1 平交道口信号设备组成
道口信号设备包括公路侧信号设备和铁路侧信号设备。公路侧信号设备由自动栏木、道口音响和道口信号机等组成。
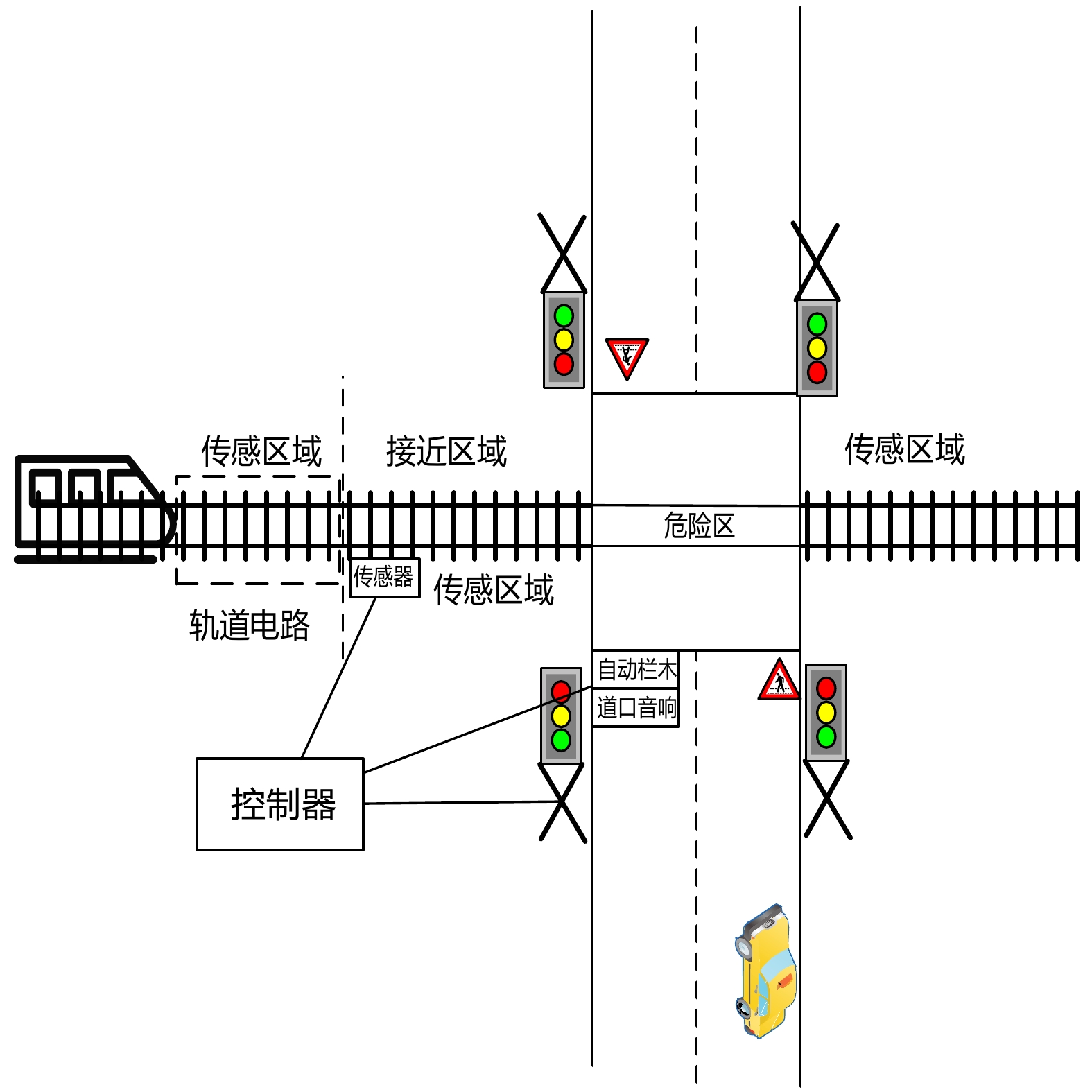
铁路侧信号设备由遮断信号机、联锁单元、传感器和控制器等组成,典型的平交道口如图1所示。图1中,传感区域是传感器能检测出列车接近、通过及出清状态的区域;控制器接受传感器指令,对被控单元进行控制。被控单元包括自动栏木、道口音响和信号机(道口信号机和遮断信号机)。
1.2 平交道口信号设备工作原理
列车接近道口时,传感器检测到其状态并将接近信息发送给控制器。控制器对信息进行处理,并生成控制指令,控制自动栏木落下、道口信号机显示禁止通过信号、道口音响鸣响。
此时,传感器实时检测列车通过状态信息并向控制器发送。当列车完全出清平交道口区域时,控制器接收到列车完全离开信息,生成控制信号,控制自动栏木升起、道口音响静音、道口信号机显示允许通过信号、遮断信号机显示红灯。
2 Petri网简介
2.1 Petri网定义
Petri网从形式上是一种描述分布式系统的模型,在描述系统结构的同时也能模拟系统的状态。在Petri网中,描述系统结构的部分称之为网。网由库所、变迁和弧组成,弧是带有方向的有向弧,库所和变迁依靠有向弧连接,有向弧上带有权值,托肯表示图中的状态信息。在Petri网模型的图像表达中,库所用图形圆表示,变迁用细长的矩形表示,托肯用小黑点表示,库所中可以有若干托肯,当托肯数量较大时可用数字替代小黑点。基本定义如下。
Petri网是一个四元组,用
N=(P, T; Pre, Post) 表示,其中:P 表示有限库所(Place)的合集,P={p1,p2,⋯,pm} ;T 表示有限变迁(Transition)的合集,T={t1,t2,⋯,tn} 。库所集和变迁集必须满足如下关系:
P≠∅, T≠∅, P∪T≠∅ {\boldsymbol{Pre}} 表示Petri网的前置关联矩阵,{\boldsymbol{Pre}} \in \left( {P \times T} \right) ,物理含义是从库所到变迁的有向弧的权重;{\boldsymbol{Post}} 表示Petri网的后置关联矩阵,{\boldsymbol{Post}} \in \left( {T \times P} \right) ,物理含义是从变迁到库所的有向弧的权重。2.2 Petri网基本模型
Petri网的基本模型有顺序模型、选择模型和并发模型等。本文通过这些模型来描述平交道口信号设备的控制过程。
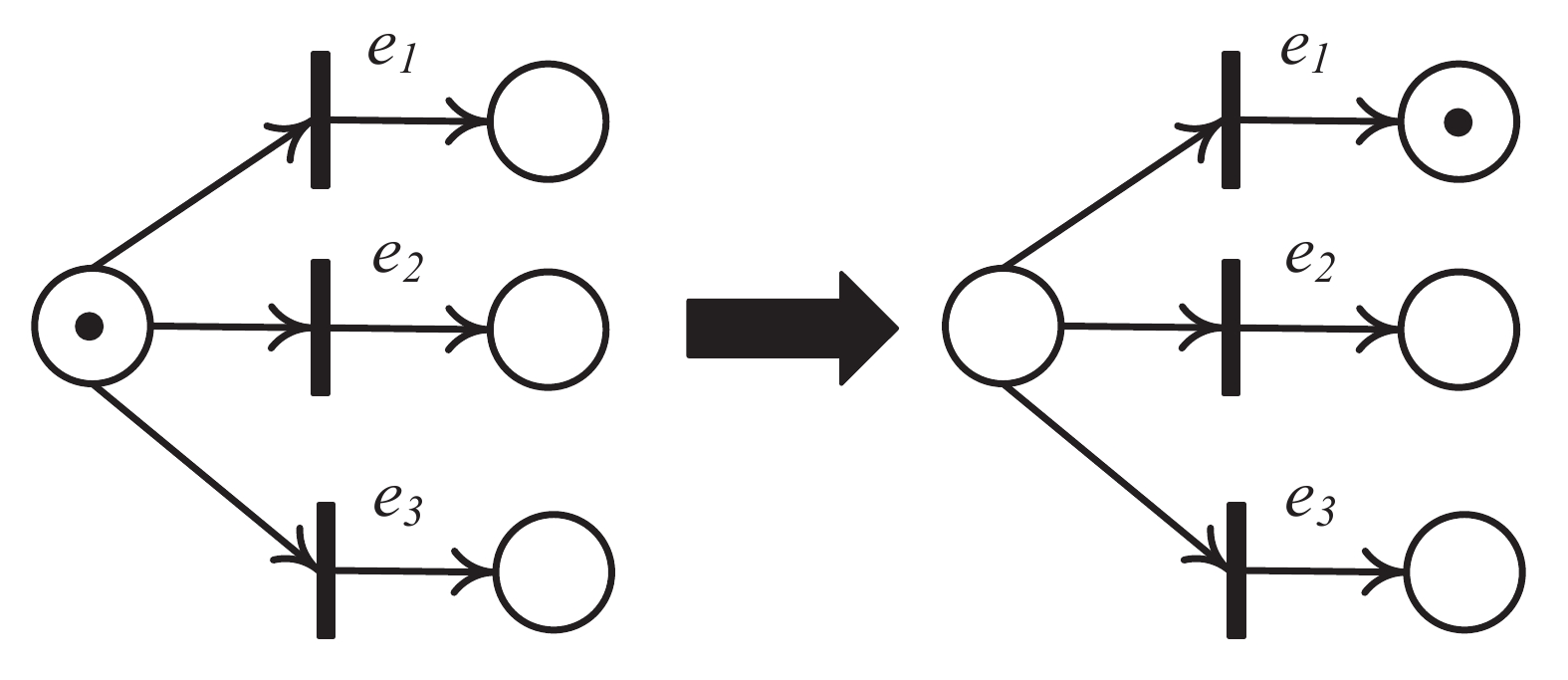
(1) 顺序模型
当给定初始标识时,只有在事件
e_1 触发后,事件e_{\text{2}} 才能发生,事件e_{\text{3}} 也只能在e_{\text{2}} 触发之后发生。顺序模型如图2所示。(2)选择模型
模拟事件之间的选择情形。给定托肯,事件
e_1 ,e_{\text{2}} 和e_{\text{3}} 都是使能的,但是,如果这些事件中的任意一个发生,那么其他事件就是禁用的,也可以说这些事件是相互冲突的。选择模型如图3所示。(3)并发模型
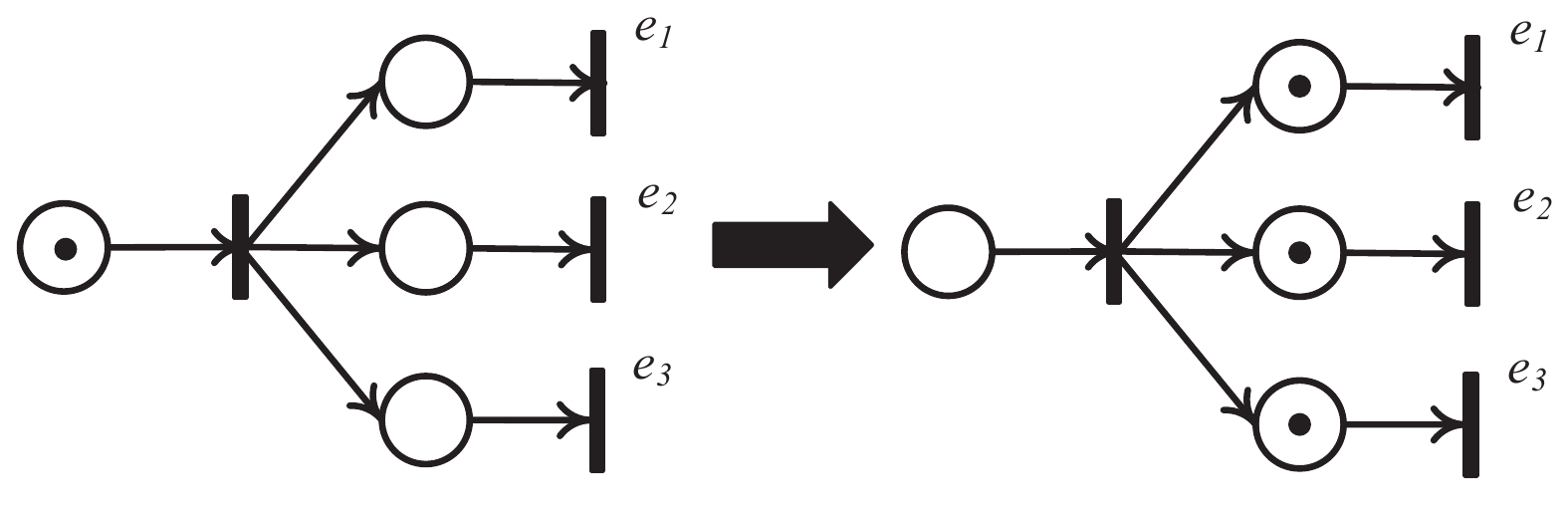
在唯一给定托肯的变迁触发后,在最初的标识中,所有事件
e_1 ,e_{\text{2}} 和e_{\text{3}} 是独立触发并且可以按任何顺序发生,甚至可以同时发生。并发模型如图4所示。3 平交道口信号设备 Petri 网模型
从离散事件系统的角度来看,平交道口的运行是列车和车辆在确保安全运行条件下有序利用平交道口资源的过程,这一过程中有大量的并发和并行事件发生,事件与事件之间存在着冲突和资源竞争等现象,平交道口的控制是对平交道口处这些大量并行、并发事件控制策略的智能处理。
本文针对平交道口3种主要信号设备,即传感器、控制器设备和被控单元的控制逻辑及控制过程,以Petri网为工具,分别建立它们对应功能的Petri网模型,完成对平交道口信号设备的智能控制。
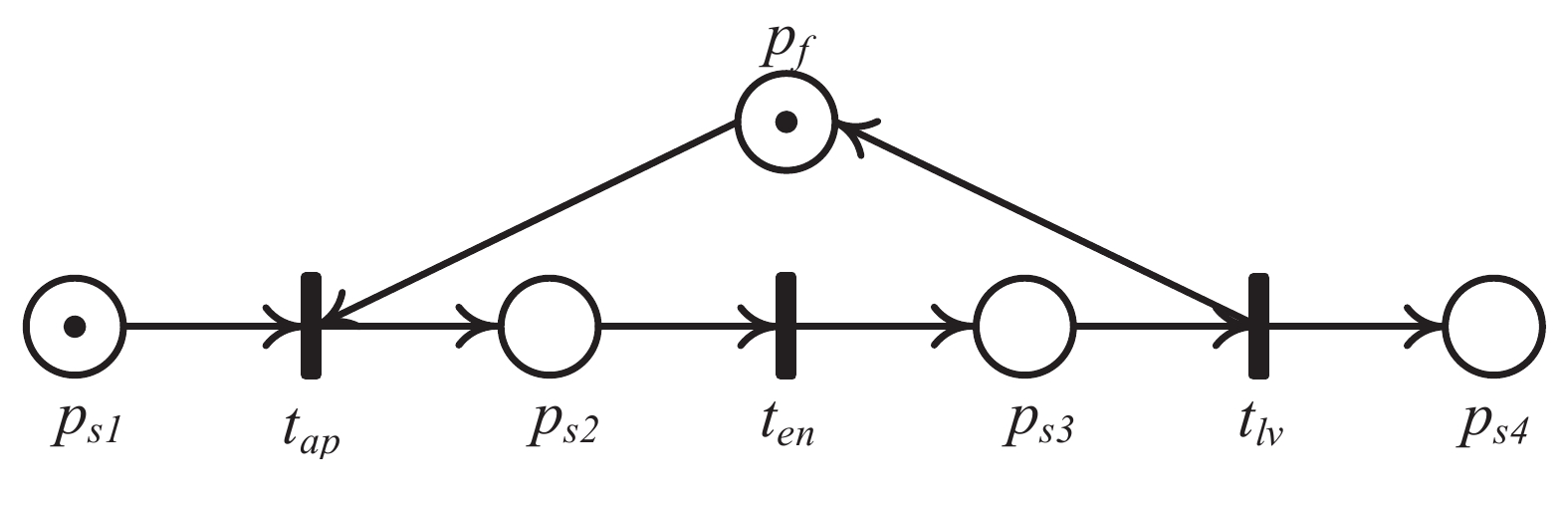
3.1 传感器Petri网模型
传感器Petri网模型如图5所示。在本模型中,传感器检测到的状态变化一次,变迁的使能就发射一次。库所
{p}_{f} 表示平交道口的路权;库所{p}_{s1} 被标记,表示列车在平交道口区域外;当库所{p}_{s1} 和{p}_{f} 同时被标记时,变迁{t}_{ap} 的使能发射并带走库所{p}_{s1} 和{p}_{f} 中的托肯,同时,发送一个新的托肯给库所{p}_{s2} ;库所{p}_{s2} 被标记,表示列车在平交道口区域内且正在接近道口危险区域,此时平交道口的路权赋予给该列列车,库所{p}_{f} 不被标记,不能赋予路权给下一列车及公路上的行人和汽车等。同理,当库所{p}_{s2} 被标记,变迁{t}_{en} 的使能发射并带走库所{p}_{s2} 中的托肯,发送一个新的托肯给库所{p}_{s3} ,表示列车进入平交道口危险区域;库所{p}_{s3} 被标记,变迁{t}_{lv} 的使能发射并带走库所{p}_{s3} 中的托肯,同时,发送新的托肯给库所{p}_{s4} 和{p}_{f} ,表示列车离开平交道口危险区域,平交道口重新获得路权,允许下一列列车使用该平交道口。3.2 控制器Petri网模型
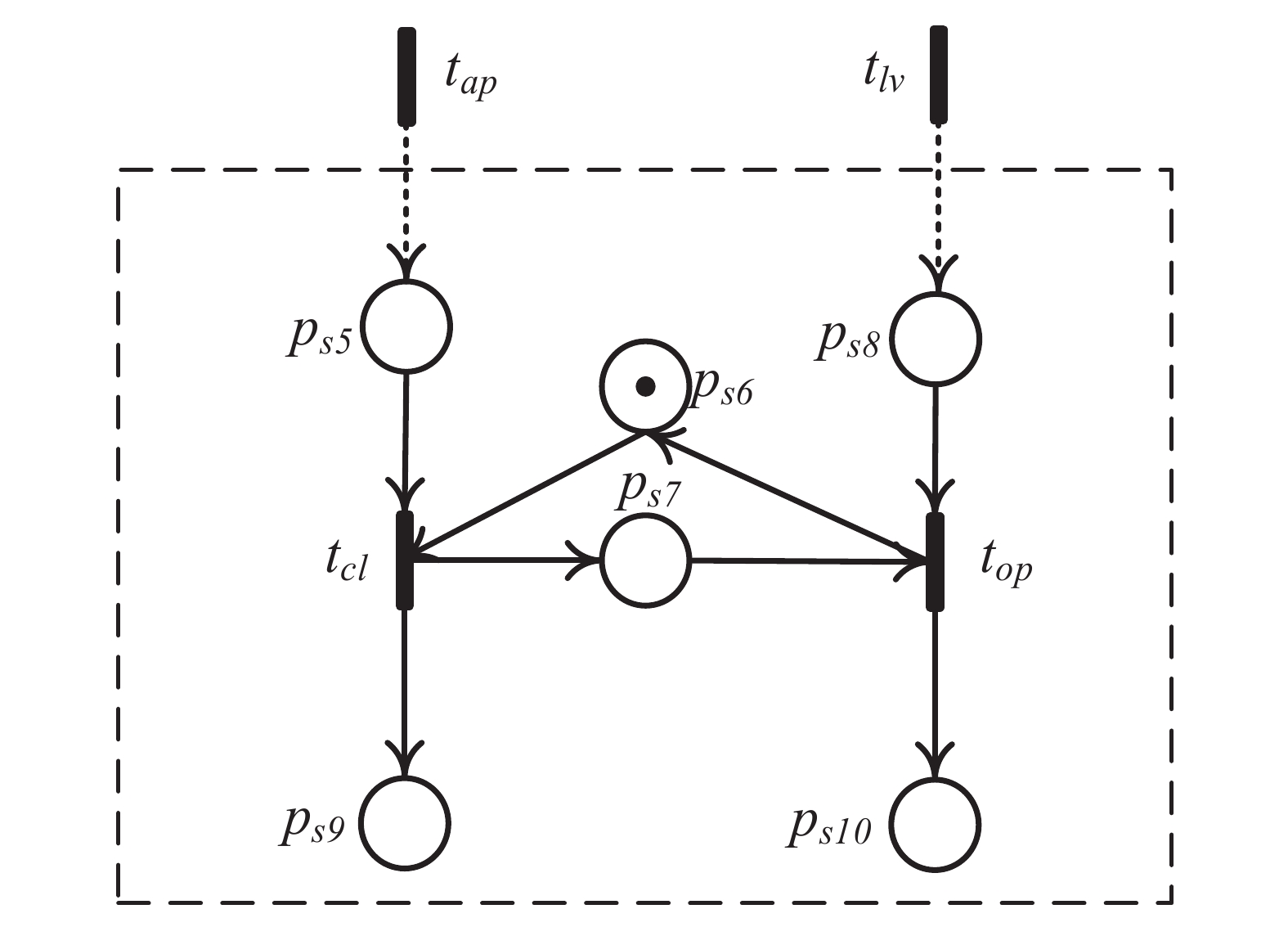
平交道口控制器Petri网模型如图6所示。
本模型网结构需要结合图5传感器Petri网模型进行说明。当列车进入平交道口区域,即库所
{p}_{s2} 被标记,传感器检测到列车状态信息,将其发送给控制器,通过变迁tap使能发送一个托肯给库所{p}_{s5} ;控制器分析该信息,计算并生成控制命令,将其发送到被控单元,表示在网结构中变迁tcl使能发送托肯给库所{p}_{s7} 和{p}_{s9} 。需要说明的是,库所{p}_{s6} 表示被控单元处于空闲状态,只有当传感器检测到列车进入道口区域且被控单元处于空闲状态时,控制器才能改变被控单元的状态,即变迁tcl的使能发射;库所{p}_{s7} 被标记,表示列车在平交道口中。当列车离开平交道口区域时,传感器检测到列车位置变化信息,通过变迁
{t}_{lv} 使能发送一个托肯给库所{p}_{s8} ,表示这一信息发送到控制器;当库所{p}_{s6} 和{p}_{s8} 同时被标记时,变迁{t}_{op} 使能发射托肯到库所{p}_{s10} 中,表示被控单元的自动栏木升起、道口音响静音和道口信号机显示允许通行信号的条件满足。3.3 被控单元Petri网模型
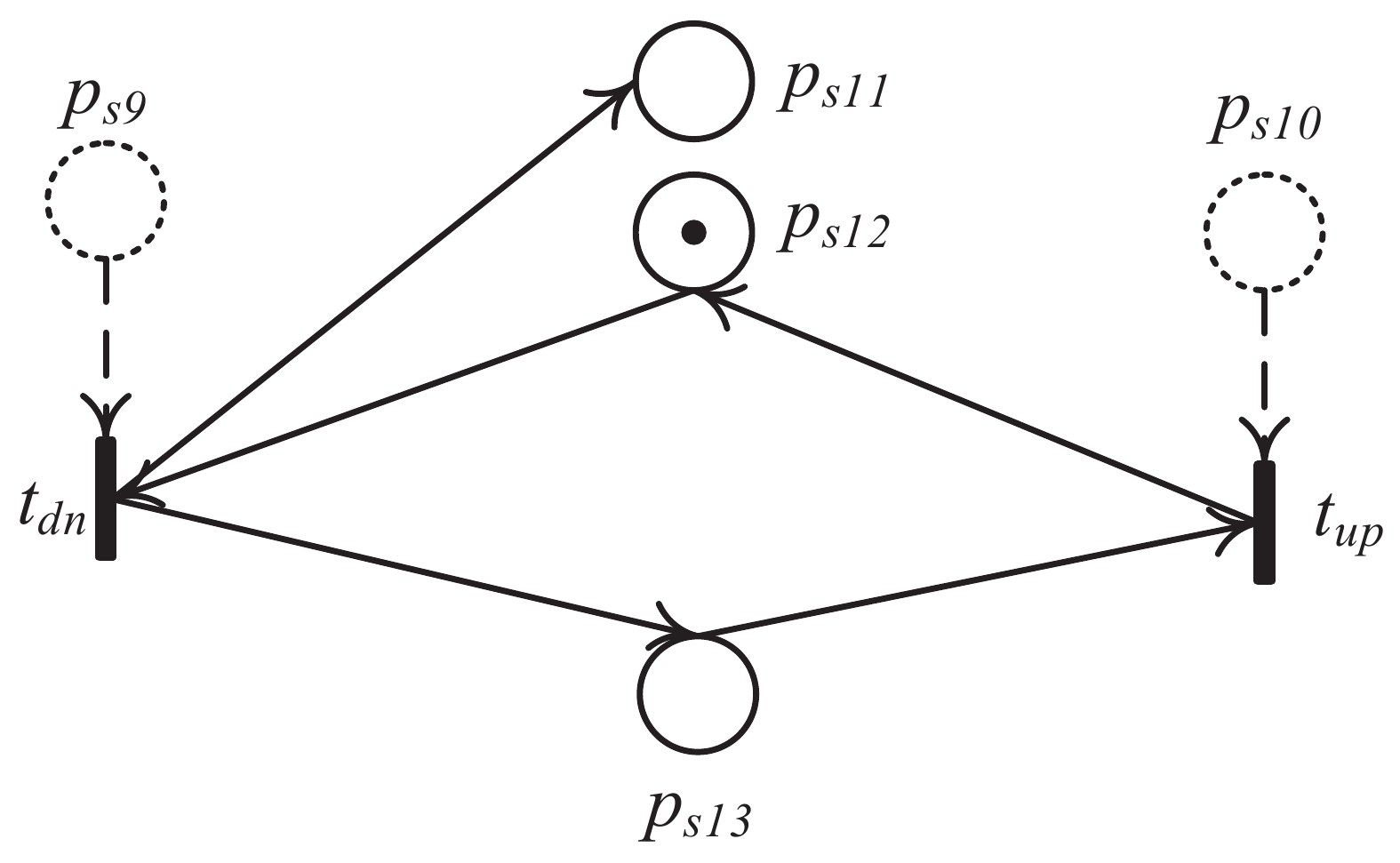
被控单元主要指自动栏木、道口音响和信号机,被控单元Petri网模型如图7所示,其中,变迁
{t}_{dn} 和{t}_{up} 的使能发射分别表示被控单元的自动栏木向下和向上、道口音响鸣响和静音、道口信号机显示禁止通行和允许通行灯光,以及遮断信号机不显示和显示红灯。由于被控单元的这3种设备是并发状态,故采用同一模型表示。本文不考虑自动栏木升起/落下等过程的时延,默认被控单元动作的瞬时性。只有在满足关闭和开放的条件时,被控部件才能动作,阻止和允许车辆和行人通过。库所{p}_{s11} 被标记表示被控单元已完成状态变化,即自动栏木落下、道口音响鸣响、道口信号机显示禁止信号、遮断信号机无显示,此时允许列车进入危险区域。4 平交道口信号设备故障诊断
4.1 铁路平交道口整体建模
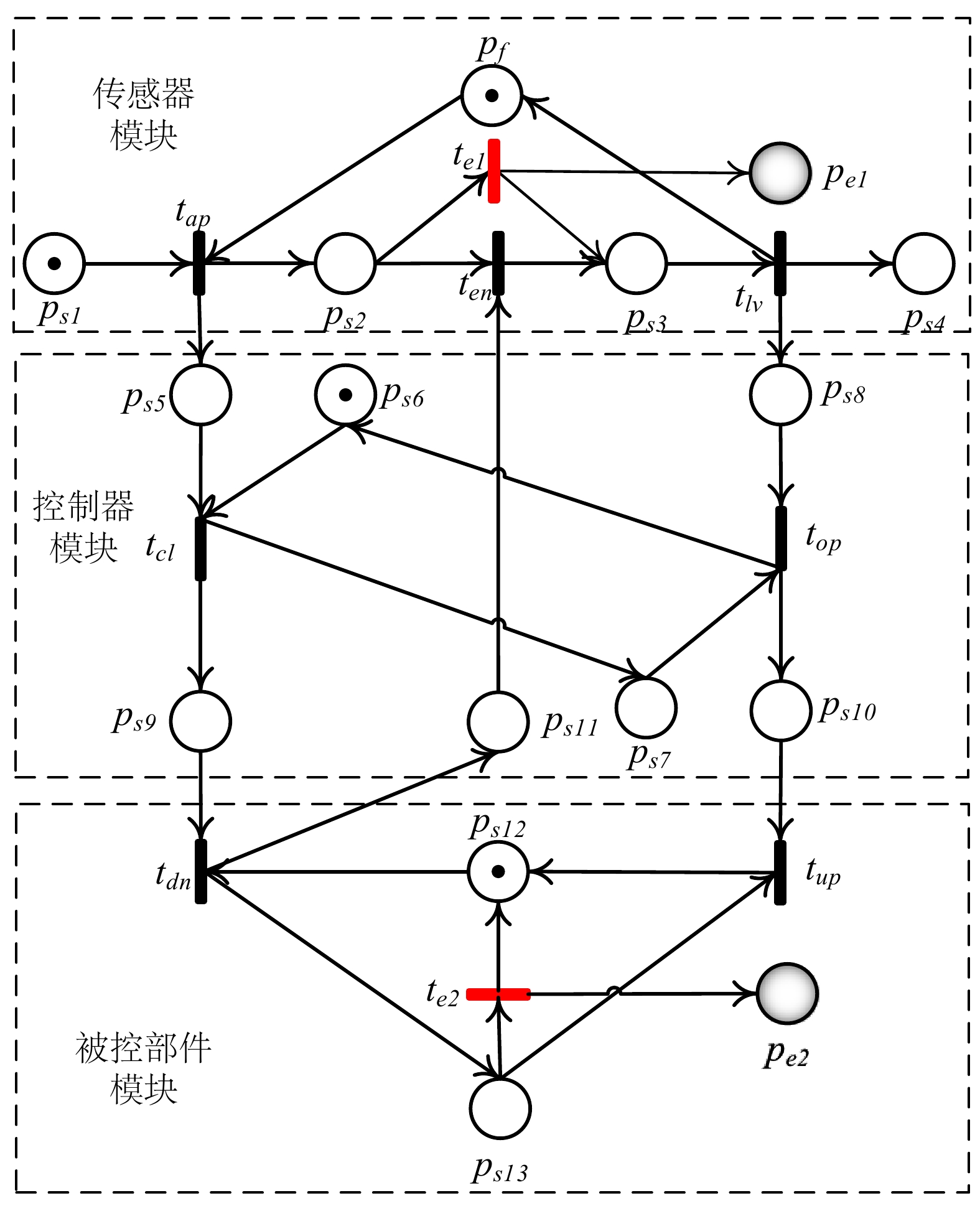
根据上述3个主要信号设备Petri网模型的内在逻辑关系,将它们整合成一个具有故障诊断功能的平交道口信号设备Petri网模型,如图8所示。
该模型反映平交道口信号设备的控制逻辑。当列车通过未被前车占用路权的道口(库所
{p}_{f} 被标记)时,会先占据该道口的路权,并通过传感器发送一个指令给控制器(变迁{t}_{ap} 使能发送一个托肯给库所{p}_{s5} );控制器接收到命令后进行分析、计算,生成控制命令发送给被控单元(变迁{t}_{ap} 使能发送托肯给库所{p}_{s7} 和{p}_{s9} );当被控单元接收到控制命令后,进行相应的动作(变迁{t}_{dn} 使能发射托肯给库所{p}_{s13}{和}{p}_{s11} ),此时,列车可以安全通过。在图8中,用红色变迁示意故障设备,完成故障诊断功能。例如,红色变迁
{t}_{e1} 使能发射,表示传感器故障,导致列车在自动栏木放下之前就进入平交道口区域;红色变迁{t}_{e2} 使能发射,表示被控单元发生故障,导致自动栏木错误抬升、道口音响错误静音、道口信号机错误表示。故障库所{p}_{e1} 和{p}_{e2} 用阴影示意,其被标记的含义分别为列车因传感器故障错误进入道口危险区域和因被控单元错误动作而导致列车、行人、汽车等进入危险区。4.2 平交道口信号设备Petri网模型可达图
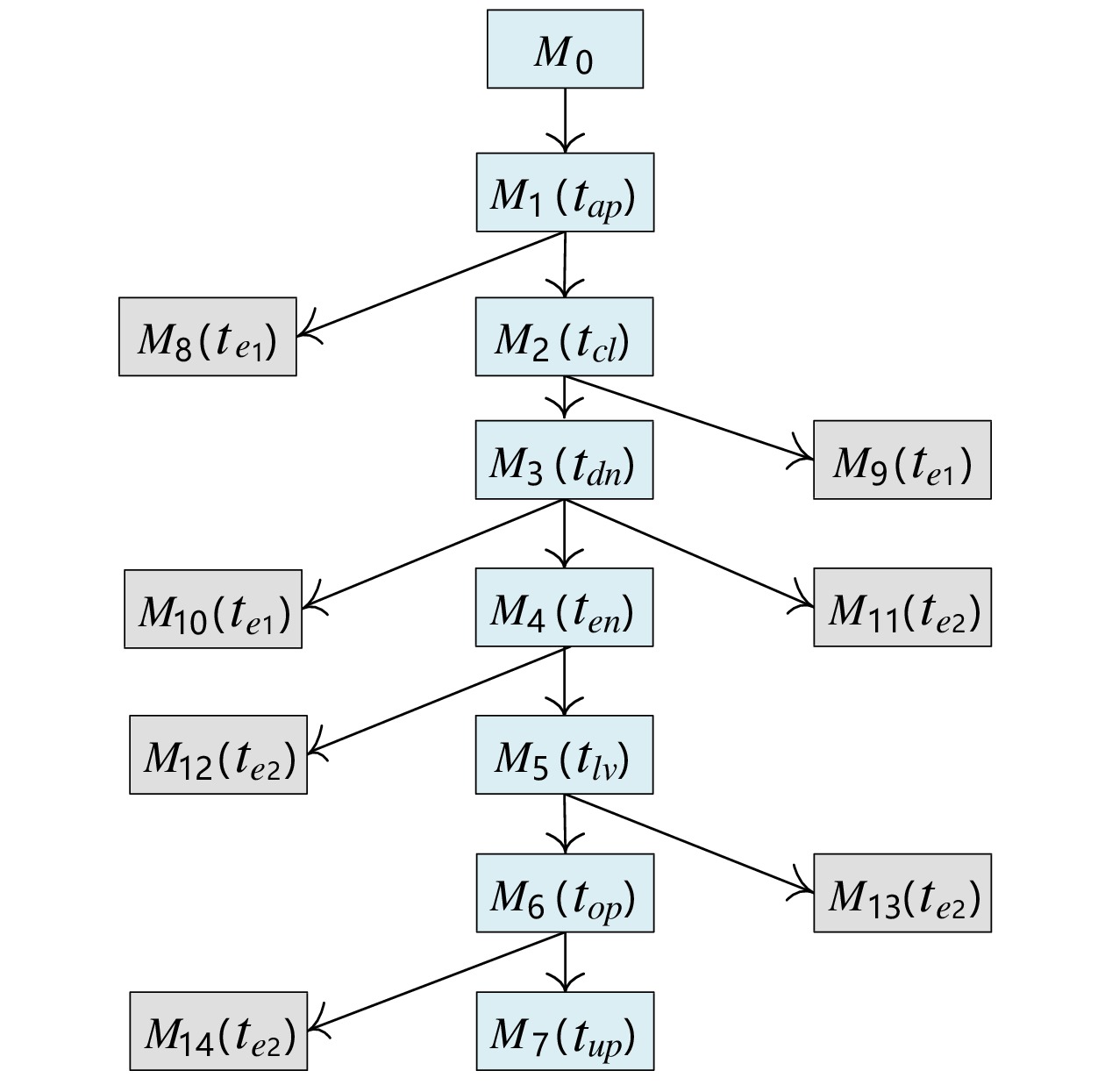
本文采用仿真软件TINA实现平交道口信号设备Petri网模型可达图,通过可达图遍历列车在道口运行过程中可能出现的情况。图8的可达标识
M 中涉及16个库所,为\begin{aligned} M=&[ p_{S1}{,}{p}_{S2}{,}{p}_{S3}{,}{p}_{S4}{,}{p}_{S5}{,}{p}_{S6}{,}{p}_{S7}{,}\\ &{p}_{S8}{}{,}{p}_{S9}{,}{p}_{S10}{,}{p}_{S11}{,}{p}_{S12}{,}{p}_{S13}{,}\\ &{p}_{f}{,}{p}_{e1}{,}{p}_{e2}]^{T} \end{aligned} 网结构的初始标识值
{M}_{0} 为\begin{aligned} {M}_{0}=&[ 1{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}\\ &{0}{,}{1}{,}{0}{,}{0]}^{T} \end{aligned} 生成的部分可达图如图9所示,用灰色部分表示出现故障的可达状态。青色部分表示列车安全通过过程。由于故障库所
{p}_{e1} 和{p}_{e2} 被标记后,表示已经有故障出现,网结构的继续运行失去了意义。故当可达状态中出现故障库所{p}_{e1} 或{p}_{e2} 的值为1时,网结构之后的可达状态不再示意。表1是基于图8生成的部分平交道口信号设备Petri网可达标识。表 1 基于图8生成的部分平交道口信号设备Petri网可达标识可达状态 可达状态 {M}_{0} {[ 1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0]}^{T} {M}_{8} {[ 0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{1} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0]}^{T} {M}_{9} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{2} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0]}^{T} {M}_{10} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1]}^{T} {M}_{3} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0]}^{T} {M}_{11} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{4} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0]}^{T} {M}_{12} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1]}^{T} {M}_{5} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0]}^{T} {M}_{13} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{1]}^{T} {M}_{6} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0]}^{T} {M}_{14} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{1]}^{T} {M}_{7} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0]}^{T} - ------------- 通过本模型可以实现平交道口的列车接近—进入—离开全过程离散事件系统形式化验证,对过程中可能出现的问题进行实时诊断。以可达标识
{M}_{11} 为例,它的运行过程为列车获得平交道口的路权,但还未进入危险区域,传感器发送指令给控制器,控制器控制被控单元;由于被控单元错误动作,导致道路侧行人和车辆进入危险区,表现在网结构上,变迁{t}_{e2} 使能发射一个托肯给库所{p}_{e2} ,在可达图上的过程为{M}_{0}\to {M}_{3}\to {M}_{11} 。同理可得其他含有故障库所的可达状态。利用本模型可实现对所有故障的诊断和反馈,提升了平交道口的安全性。5 结束语
本文引入离散事件的理论,研究平交道口信号设备故障诊断方法。针对平交道口主要信号设备的内部机理,分别建立起对应的Petri网模型,按照逻辑关系,将它们整合成一个具有故障诊断功能的平交道口信号设备模型。该模型能诊断传感器和受控单元的故障,当这些设备发生错误动作时进行报警,从而提高平交道口的安全性。下一步的工作是进一步改进该故障诊断方法并将其应用到实际道口中。
-
表 1 基于图8生成的部分平交道口信号设备Petri网可达标识
可达状态 可达状态 {M}_{0} {[ 1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0]}^{T} {M}_{8} {[ 0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{1} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0]}^{T} {M}_{9} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{2} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0]}^{T} {M}_{10} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1]}^{T} {M}_{3} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0]}^{T} {M}_{11} {[ 0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0]}^{T} {M}_{4} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0]}^{T} {M}_{12} {[ 0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1]}^{T} {M}_{5} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0]}^{T} {M}_{13} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{1]}^{T} {M}_{6} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{0}{,}{1}{,}{1}{,}{0}{,}{0]}^{T} {M}_{14} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{1]}^{T} {M}_{7} {[ 0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0}{,}{0}{,}{0}{,}{0}{,}{1}{,}{0}{,}{1}{,}{0}{,}{0]}^{T} - -------------  下载: 导出CSV
下载: 导出CSV
-
[1] 王 玺. 铁路道口安全防护系统集中控制的研究与应用 [J]. 现代信息科技,2018,2(6):19-20,23. DOI: 10.3969/j.issn.2096-4706.2018.06.008 [2] 曾惠明. 铁路平交道口预警防护及远程监控系统 [J]. 铁道运营技术,2021,27(2):38-40. [3] 胡 斌. 铁路平交道口双向智能报警系统的设计应用 [J]. 科技创新与生产力,2020(12):61-63,66. DOI: 10.3969/j.issn.1674-9146.2020.12.061 [4] 党永乐,刘西京. 公路-铁路平交道口安全研究综述 [J]. 汽车实用技术,2019(24):241-242. [5] 王 霞, 刘 宁. 道口管理系统多参数的形式化建模与验证 [J]. 综合运输,2019,41(2):65-72. [6] 张 芳. 铁路车站内道口信号报警系统设计 [J]. 甘肃科技,2014,30(1):68-69,75. DOI: 10.3969/j.issn.1000-0952.2014.01.023 [7] 于 革,刘春煌,吴鹏辉. 基于AV-FMS的铁路平交道口安全监控系统 [J]. 铁路计算机应用,2008,17(12):1-4. DOI: 10.3969/j.issn.1005-8451.2008.12.001 [8] 孙 超,陈黎洁,宋凤娟. 有色Petri网在平交道口安全性分析中的应用 [J]. 铁路计算机应用,2018,27(9):52-56,62. DOI: 10.3969/j.issn.1005-8451.2018.09.012 -
期刊类型引用(0)
其他类型引用(1)















































































计量
- 文章访问数: 90
- HTML全文浏览量: 54
- PDF下载量: 12
- 被引次数: 1
