

Construction of railway line 3D scene based on WebGIS
-
摘要: 文章基于WebGIS技术,研究了铁路线路三维场景构建方法并将其应用于工程实践中。利用数字高程模型(DEM,Digital Elevation Model)与高分辨率遥感影像构建了铁路线路三维带状地理环境;对铁路工程要素模型进行参数化建模,并将建筑信息模型(BIM,Building Information Modeling)与三维地理环境场景进行交互定位;基于ArcGIS Online平台,实现某条铁路线路三维场景的发布、在线浏览、空间分析等功能的应用。Abstract: Based on WebGIS technology, this paper studied the construction method of railway line 3D scene and applied it to engineering practice. The paper used Digital Elevation Model (DEM) and high-resolution remote sensing images to construct the 3D banded geographical environment of railway line, carried out the parametric modeling of railway engineering element model, and implemented the interactive positioning between Building Information Modeling (BIM) and 3D geographic environment scene. Based on ArcGIS online platform, the paper realized the application of 3D scene publishing, online browsing, spatial analysis and other functions of a certain railway line.
-
Keywords:
- railway line /
- WebGIS /
- Building Information Modeling(BIM) /
- 3D visualization /
- remote sensing image
-
随着铁路工程建设信息化的发展,建筑信息模型(BIM,Building Information Modeling)在铁路工程全生命周期中得到了广泛的应用。互联网交互技术及实景三维地理信息技术的飞速发展,使得铁路三维信息化建设逐渐向分布式数据存储、网络化协同管理迈进。铁路工程作为一种线性带状工程,具有跨度长、范围广、信息量大等特点,而以Autodesk Revit平台为代表的BIM设计软件支持的地理空间范围较小,不具备地理信息的空间分析能力。目前,BIM+ 地理信息系统(GIS,Geographic Information System)的融合应用主要集中在PC端,文献[1]基于Infraworks平台研究了利用BIM技术构建铁路三维场景的方法;文献[2]研究了BIM+GIS的铁路三维场景快速建立方法;文献[3]提出了一套完整的铁路设计BIM+GIS解决方案。同时,随着WebGIS与WebGL技术的不断发展,网络三维可视化领域的研究不断增加,文献[4]利用Web技术实现了融合BIM技术的水利水电工程集成管理;文献[5]应用WebGL技术实现铁路三维虚拟踏勘与遥感判释系统的设计。目前,融合WebGIS技术与WebGL技术的BIM三维可视化技术在铁路工程建设领域的应用相对较少。本文研究了基于WebGIS的铁路线路三维场景的构建流程,包括带状走廊地理环境的构建与BIM场景融合,并利用ArcGIS Online实现了融合BIM的铁路三维场景的网络服务发布与功能应用,为铁路工程三维可视化、网络化协同管理,以及多专业协同设计提供了一种解决方案。
1 WebGIS概述
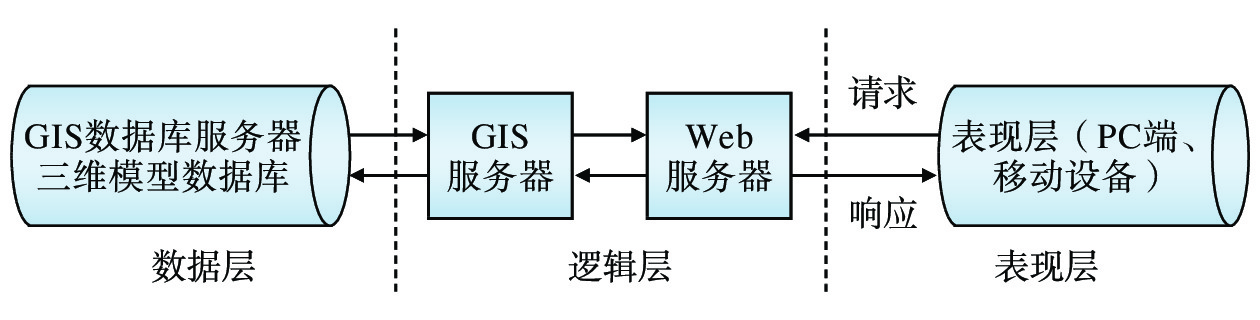
WebGIS是采用Web网络交互技术的GIS,具有较好的跨平台性与广泛的应用性[6]。WebGIS技术架构包括数据层、逻辑层和表现层,如图1所示。数据层对需要发布的地图、场景图层进行编辑,储存到GIS数据库服务器中,并发布至逻辑层中。表现层可通过浏览器访问或编辑修改数据层下的数据,从而实现数据层数据的更新与实时共享。目前,传统的WebGIS正向三维可视化迈进,利用WebGL技术在浏览器上实现三维绘图效果,使得WebGIS表现力更加真实,应用更为广泛。
本文利用WebGIS技术将铁路线路地理环境数据与铁路设施BIM参数化建模数据存储在本地GIS数据库与三维模型数据库中, 通过GIS服务器进行数据发布,从而在浏览器上实现三维漫游和功能应用。
2 铁路线路三维场景构建
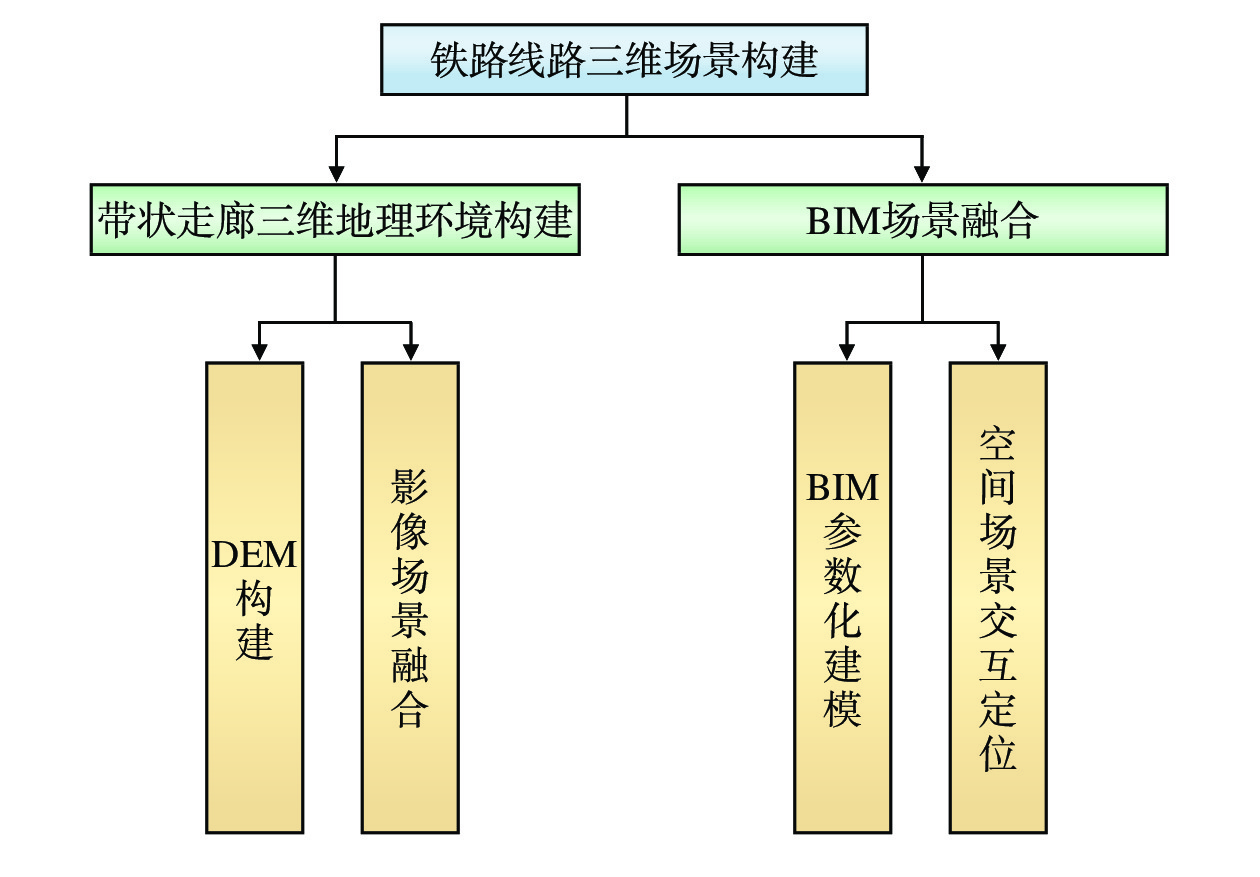
铁路线路三维场景构建主要内容包括带状走廊三维地理环境构建和BIM场景融合,如图2所示。其中,带状走廊三维地理环境构建包括数字高程模型(DEM,Digital Elevation Model)构建与影像场景融合,利用DEM构建带状走廊的三维地表数据,再通过公开的地图影像服务构建带状走廊影像数据,将DEM与影像数据叠加后,构建带状走廊真实的三维地形。BIM场景融合包括BIM参数化建模与空间场景交互定位,利用参数化建模的思路可有效提高铁路工程模型建模速度与精度。铁路工程是与地形紧密结合的线状土木工程,具有跨度长、信息量大等特点,借助GIS空间分析和三维可视化技术可实现三维场景综合信息利用与数据信息交换。
2.1 带状走廊三维地理场景构建
2.1.1 DEM构建
目前,获取DEM数据的方法有很多种[7],每种获取方式的DEM精度、速度、成本、更新程度、应用范围各不相同,如表1所示。
(1)地面测量:利用全球导航卫星系统(GNSS,Global Navigation Satellite System)定位测量,经高程转换后得到地面高程点并生成DEM;
(2)既有地形图:利用格网读点法、数字化仪手扶跟踪及扫描仪半自动采集等方法从现有地图上进行信息采集,并通过内插法生成DEM;
(3)航空摄影测量:通过空中三角形加密及立体像对得到地面点的三维坐标;
(4)激光扫描、干涉雷达:通过三维激光扫描、干涉雷达等方法直接获取DEM。
表 1 DEM获取方式及对比获取方式 DEM精度 速度 成本 更新难度 应用范围 地面测量 厘米级 很慢 高 非常困难 小范围区域 既有地形图 图上精度
(厘米级至米级)较慢 较低 困难 中小比例尺
地形采集航空摄影测量 厘米级至米级 较快 较高 容易 大型工程项目,
国家范围激光扫描、
干涉雷达厘米级 很快 很高 非常容易 高分辨率,适用于
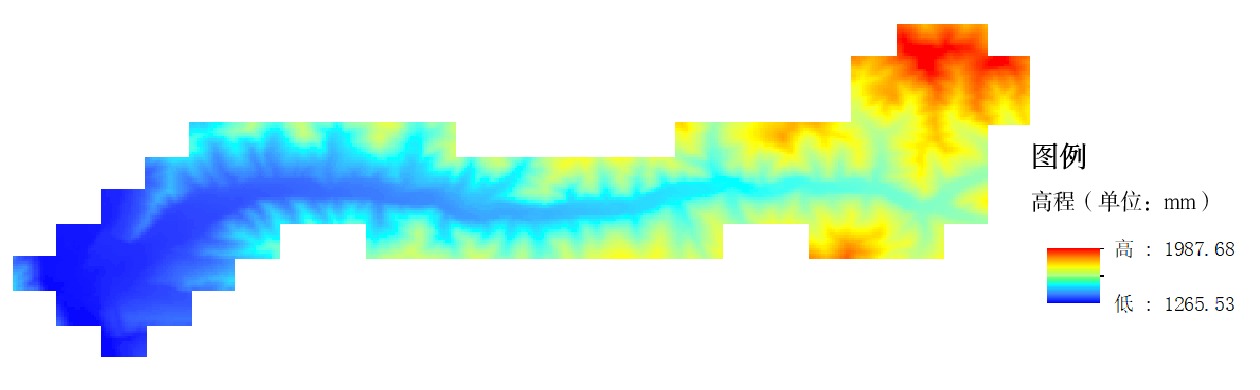
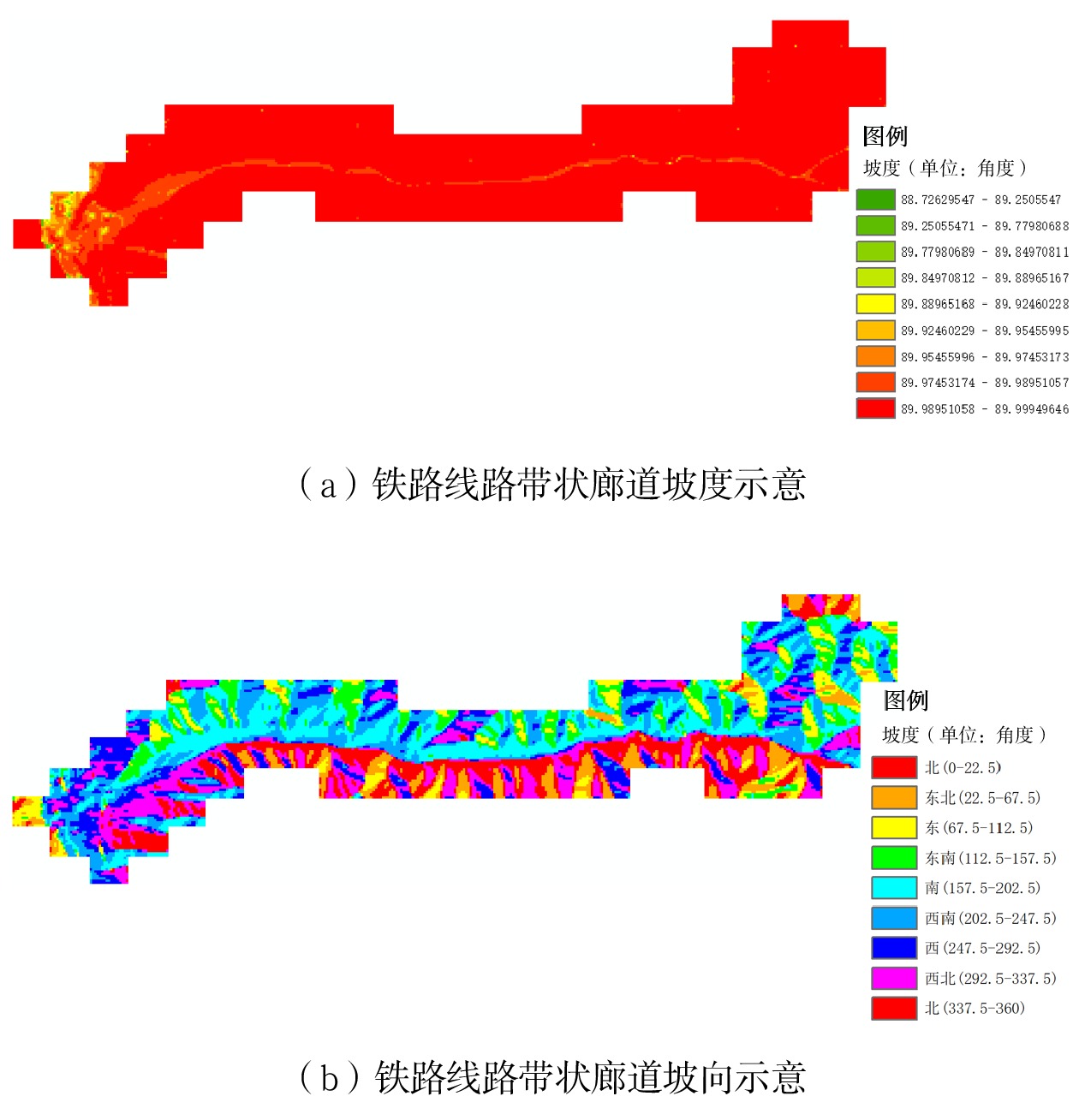
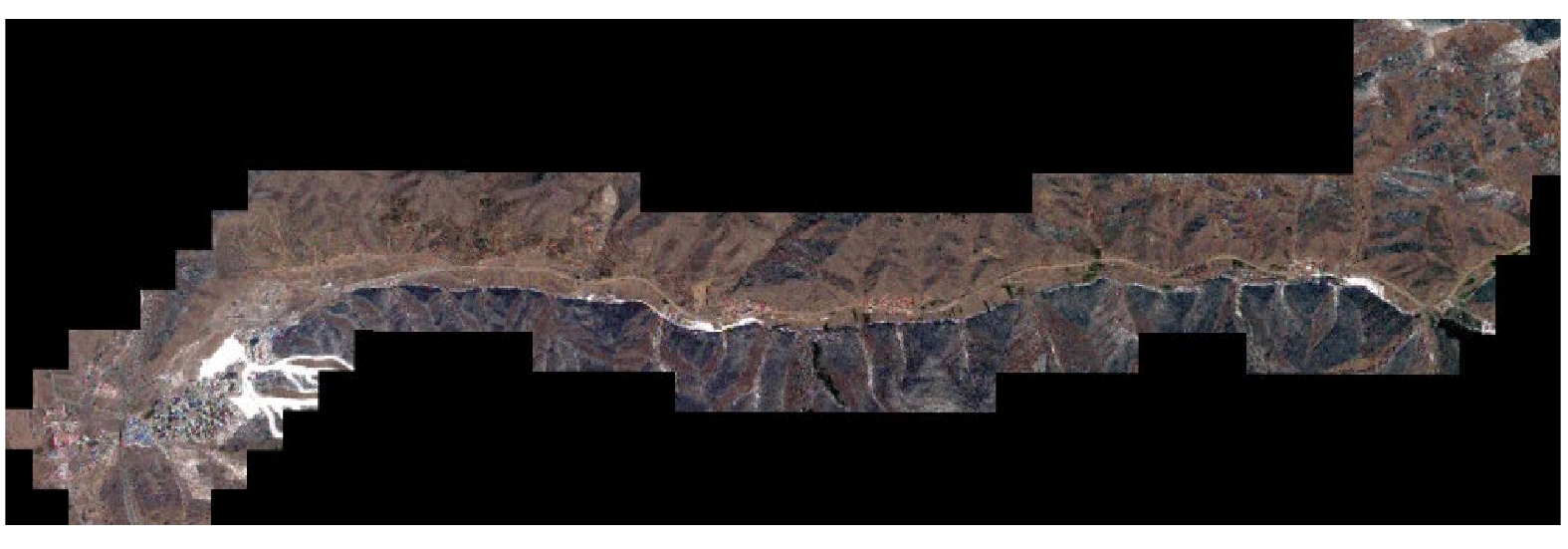
各种范围面向铁路工程的带状走廊地表DEM的获取,一般宜采用航空摄影测量或激光扫描、干涉雷达获取的方法。若考虑成本因素,可采用精度较高的既有地形图数字化法。以航空摄影测量为代表的数字摄影测量系统,利用计算机进行影像匹配,通过解析摄影测量的方法,得到所拍摄物体的空间三维坐标,可自动化、大规模创建DEM。以某段铁路为例,采用航空摄影测量的方法,利用卫星立体像对构建出该区域DEM,再通过矢量化裁剪得到该线路带状DEM,如图3所示。同时,可对该线路带状走廊的坡度、坡向等地形指标进行初步判断,如图4所示。
2.1.2 影像场景融合
线路处于前期规划阶段时,可采用公共网络平台发布的地理信息来获取地表影像 [8]。本文采用的地理信息地图投影方式为Web墨卡托(Web Mercator)投影,该投影使用的大地基准面是WGS-84椭球体,基于球面墨卡托的投影计算公式来进行网络格式化。设球面经纬度为(
λ,ϕ ),地图平面坐标为(E,N ),其投影计算公式为E=R⋅λ (1) N=R⋅ln[tan(π4+ϕ/2)] (2) 其中,R为球体半径,取WGS-84椭球的长半轴半径为6 378 137 m。
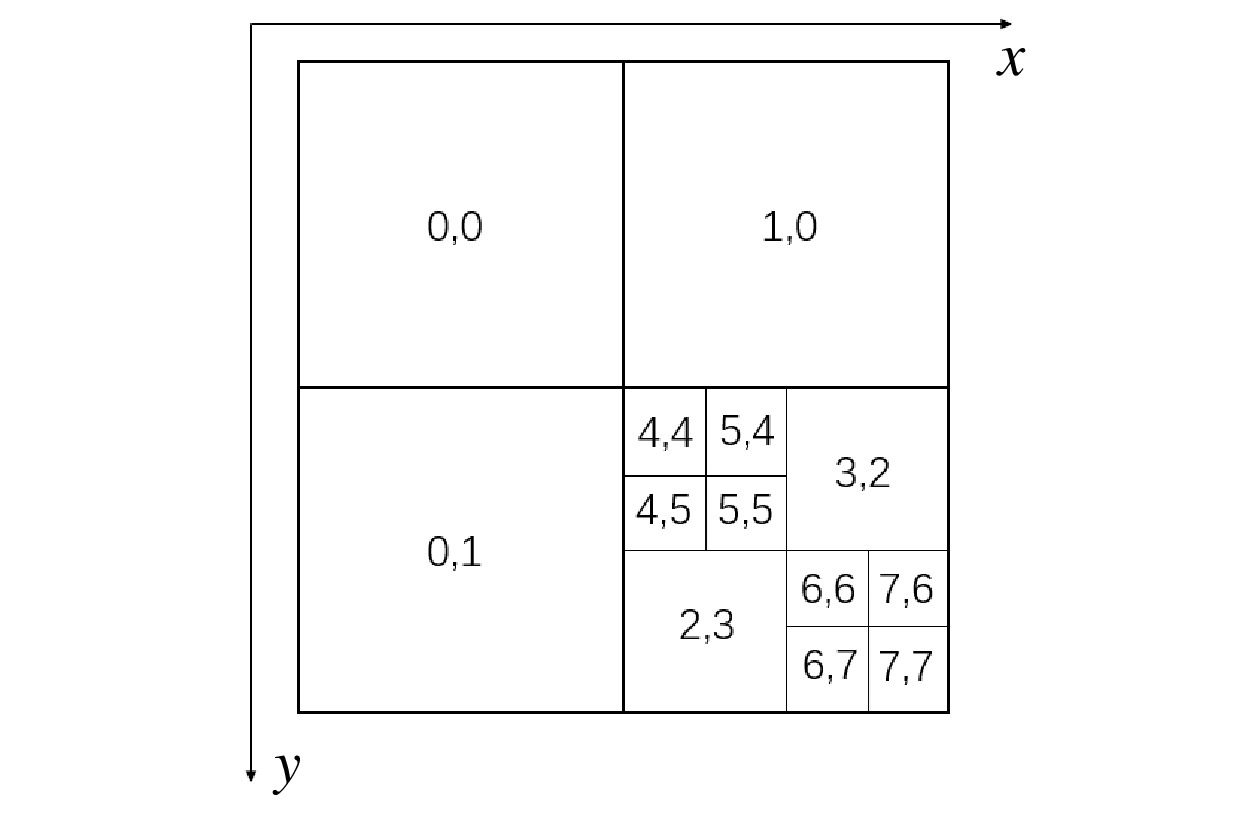
本文基于瓦片金字塔模型对采用的地图影像瓦片进行组织与管理。瓦片数据利用四叉树进行编码,缩放级别为0的单张全球影像瓦片对应树的根节点,缩放等级每提高一级,上一级叶节点就分为4个子节点,每个节点对应一块瓦片数据。可利用瓦片左上角坐标(i , j )对每个瓦片进行定位,其中,
i 、j 均为整数,将0级瓦片左上角坐标设置为(0,0 ),对应第n级右下角瓦片的左上角坐标为(2n−1,2n−1 ),各级瓦片左上角坐标及四叉树分割如图5所示。根据经纬度(
λ,ϕ )计算每一等级瓦片左上角坐标(i,j ),当缩放等级为n 级时,整个影像所在的区域被划分为4n 块,瓦片在x、y 两个方向上各均分为2n 等份,第n 级瓦片的分辨率(单位:m/ 像素)为γres=2π⋅R256×2n (3) 投影坐标系与瓦片坐标系具有等比例关系,利用该等比例关系得到瓦片坐标与投影坐标的计算公式为
i=ent(E+π⋅R256γres) (4) j=ent(−N+π⋅R256γres) (5) 将公式(1)、(2)与公式(4)、(5)联立得到瓦片坐标与球面经纬度坐标间关系为
i=ent(λ+π2π⋅2n) (6) j=ent(−ln[tan(π4+ϕ2)]+π2π)⋅2n (7) 其中,
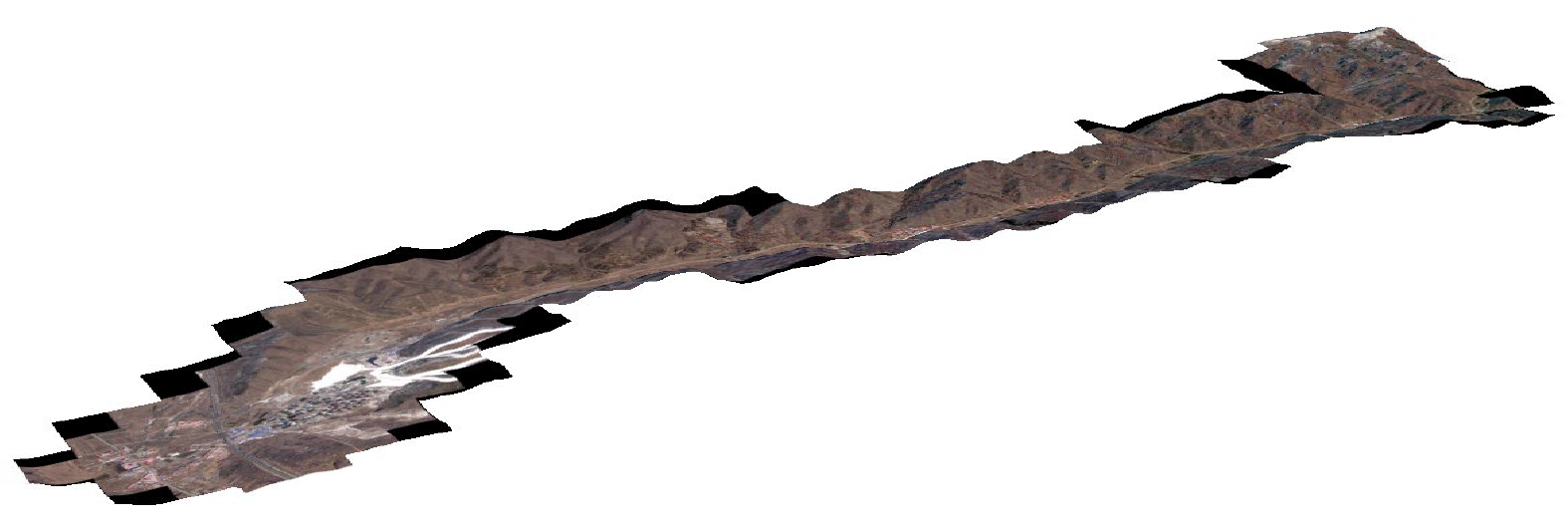
ent 为取整符号。将获取到的该线路瓦片影像进行拼接,并按照带状走廊DEM矢量范围对拼接后的瓦片影像进行裁剪,结果如图6所示。将其与DEM融合后得到该线路完整的带状走廊三维模型,如图7所示。
2.2 BIM场景融合
2.2.1 BIM参数化建模
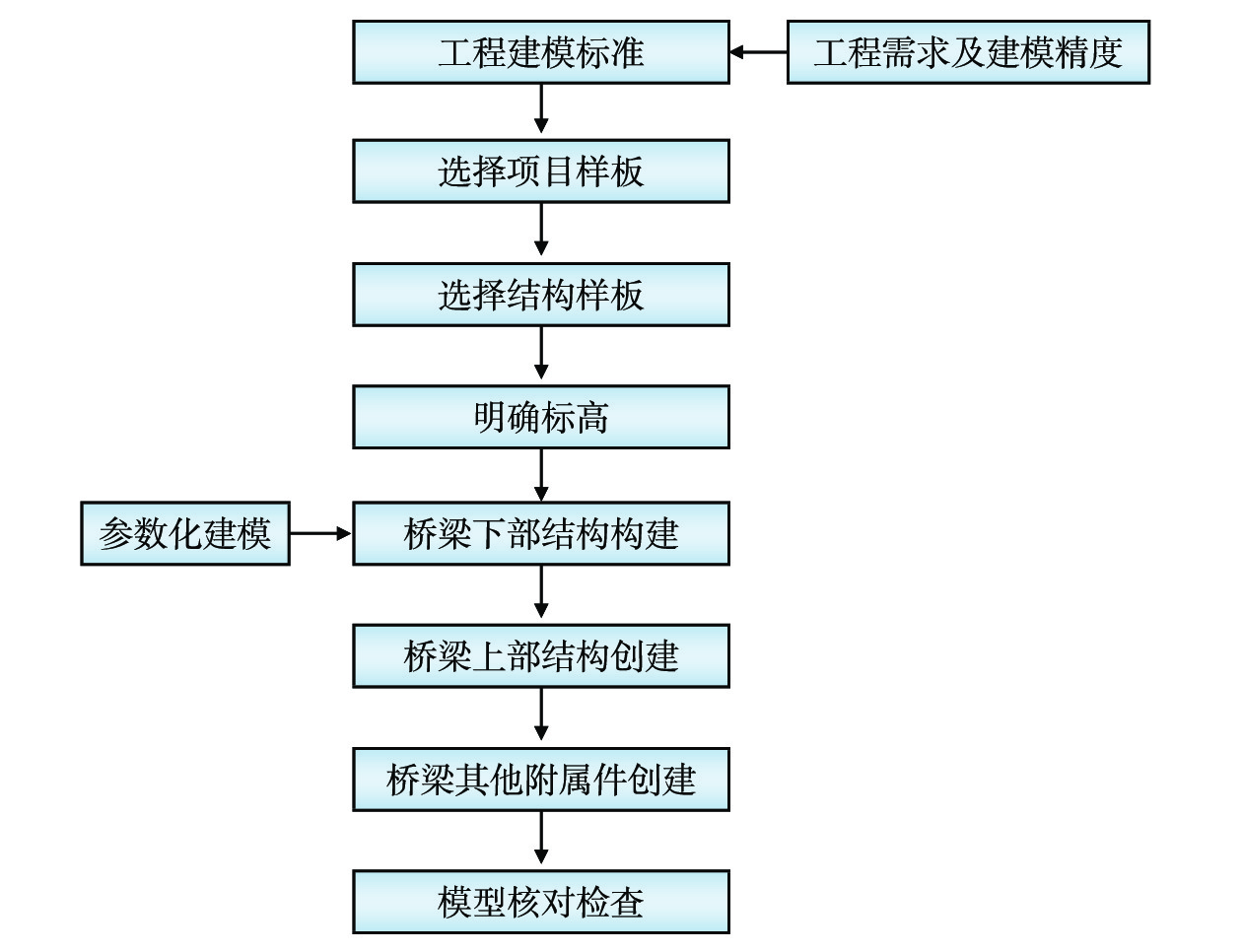
采用BIM技术对铁路工程结构进行三维建模,可有效提高管理效率与信息化水平[9]。本文以铁路桥梁建模为例,基于Autodesk Revit平台研究了BIM参数化建模的具体应用。桥梁工程建模需遵循的步骤和流程如图8所示,按该流程建模可确保模型的准确性、通用性及易用性。确定项目的建模标准后,完成项目基本设置,再依次按照桥梁下部结构、上部结构、相关附属件进行模型创建,并对模型进行核查。
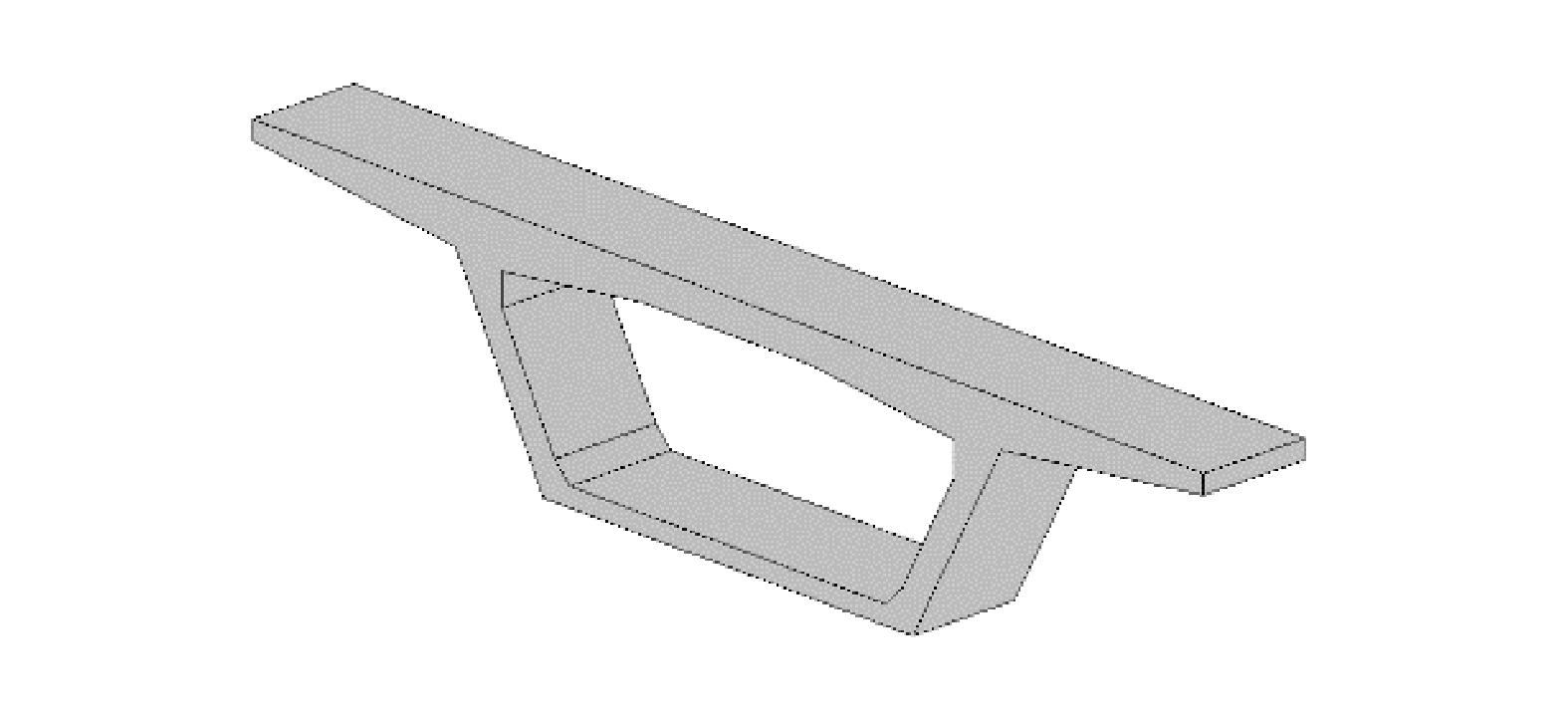
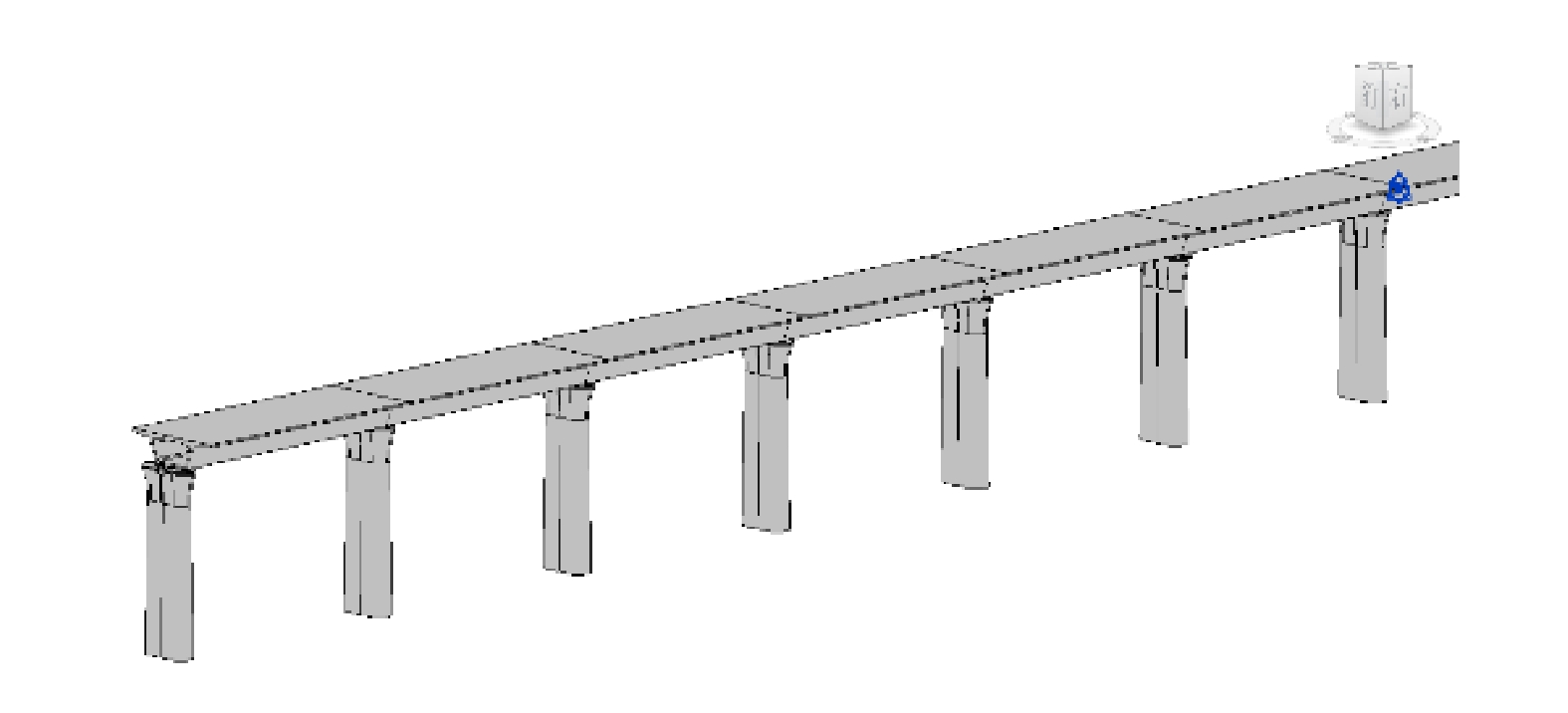
在Autodesk Revit平台上,需针对铁路工程的组成构件及构件特点自行建立族库,其中,铁路箱梁族实例如图9所示。实际工程中,桥梁桩基数量较多,手动定位较困难,本文采用Dynamo可视化编程插件放置桥梁桩基模型来保证建模数据的精度。桥墩建模与桩基建模相似,采用Dynamo插件放置桥墩模型,将放置完成后的桥墩模型与桥墩中心平面位置及高程进行核对。箱梁的参数化建模依据桥墩位置、采用Dynamo插件进行箱梁族模型放样,箱梁族模型放样结果如图10所示。
2.2.2 空间场景交互定位
在GIS平台下通常采用空间大地坐标(
B,L,H )作为数据的基本表达方式[10],而在以Autodesk Revit为代表的BIM设计平台中通常采用空间直角坐标(X,Y,Z )作为数据的基本表达方式。为实现BIM与GIS地理环境的融合,在相同的基准下,需将空间直角坐标(X,Y,Z )转换成为空间大地坐标系(B,L,H ),转换方式如下L=arctan(YX) (8) B=arctan(Z+e′2bsin3θ√X2+Y2−e2acos3θ) (9) H=√X2+Y2cosB−N (10) 其中:
e′2=a2+b2b2 (11) θ=arctan(Z⋅a√X2+Y2⋅b) (12) N为卯酉圈半径;a为参考椭球长半轴;b为参考椭球短半轴。
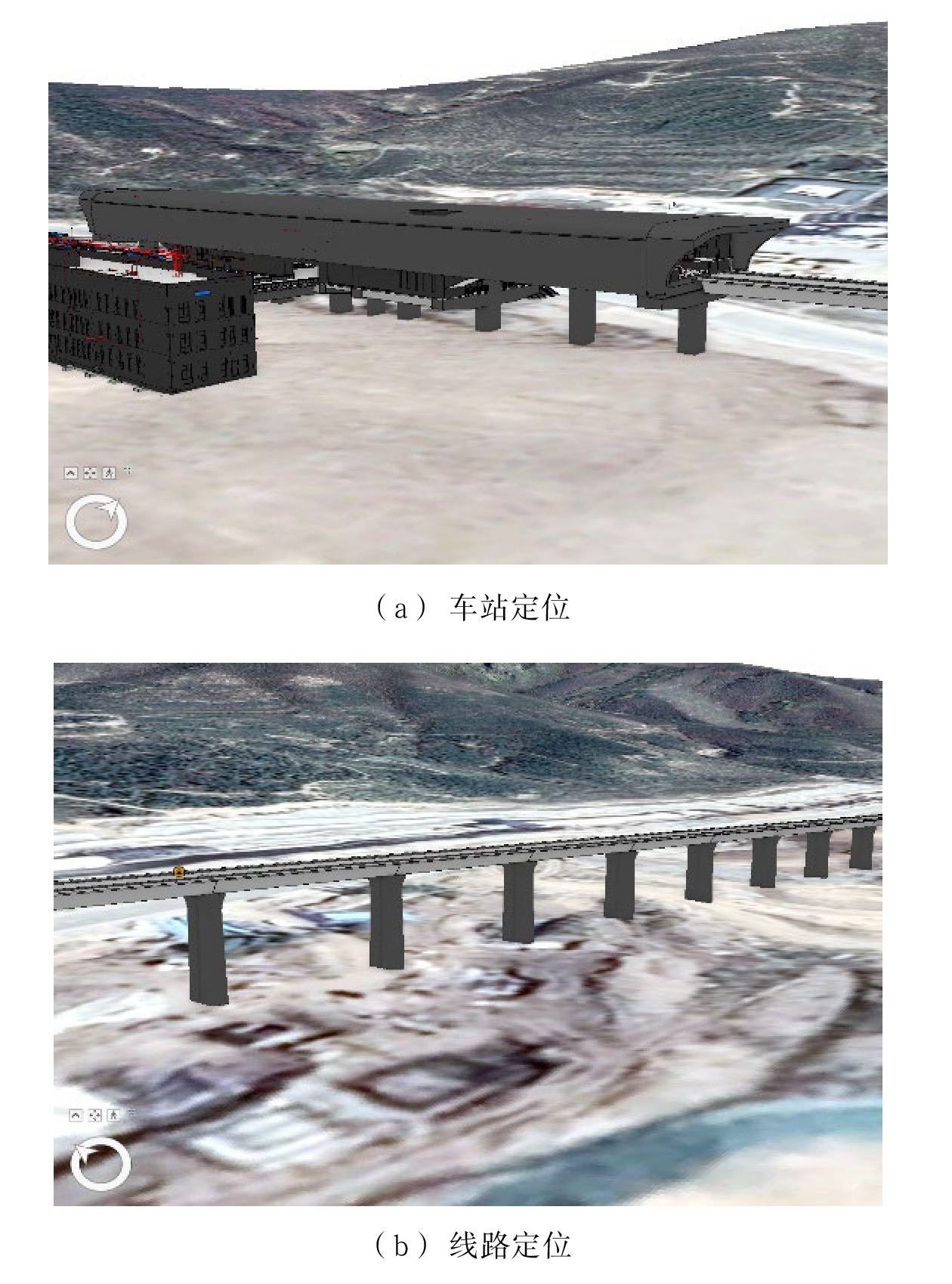
本文以某铁路线路车站场景构建为例,将空间直角坐标下的BIM转化为大地坐标。利用ArcGIS平台将BIM与带状走廊三维场景相结合,实现了BIM与PC端GIS平台的交互融合,如图11所示。在PC端完成铁路场景三维漫游、数据查询等基本功能,可为铁路设计方案比选提供三维交互场景。
3 应用实例
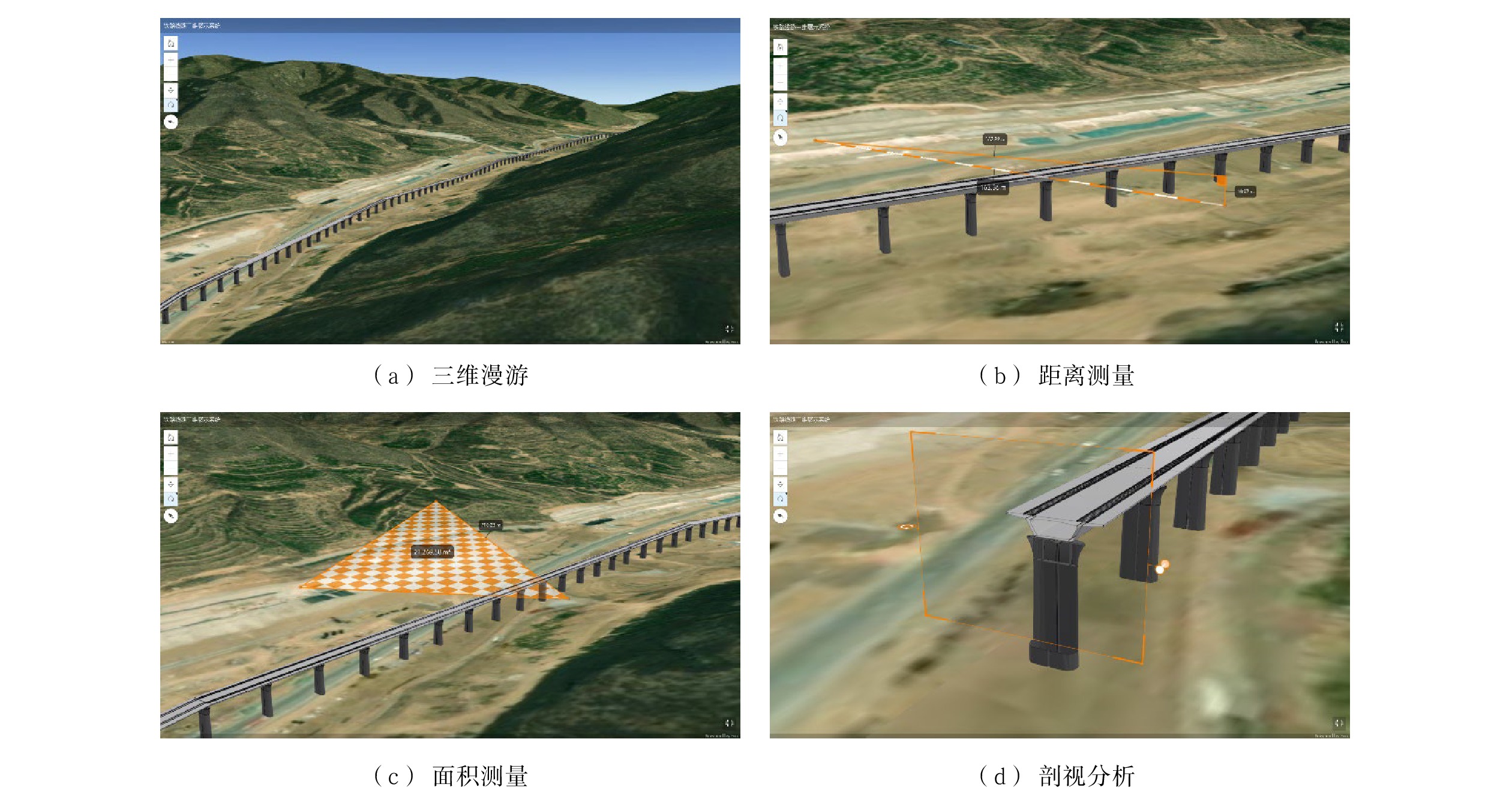
目前,BIM与GIS的融合交互主要以PC端软件为主,随着Web技术与WebGL网页三维绘图技术的发展,BIM与GIS的三维场景交互逐渐向网页端发展。本文利用ArcGIS Online实现了本地三维场景的网络服务发布与基本功能应用 。基于ArcGIS Online,将某条铁路线路的BIM参数化模型与三维带状走廊融合后构建的本地三维模型打包成SLPK场景图层包,并实现网络服务发布。同时,在网页端,实现了融合BIM三维地理场景功能应用,如图12所示,包含三维漫游、距离测量、面积测量、剖视分析、淹没分析等基本应用功能,对铁路工程多专业协同设计,综合信息化管理提供了有力支持。
4 结束语
本文研究基于WebGIS的铁路线路三维场景构建方法,在网页端融合了铁路工程BIM与带状走廊三维地理环境可视化漫游技术,实现了三维数据的可视化管理与综合利用。为铁路工程建设提供了地理信息数据与三维模型数据,便于工程设计与管理人员进行实时交互,提升铁路工程建设信息化水平。
-
表 1 DEM获取方式及对比
获取方式 DEM精度 速度 成本 更新难度 应用范围 地面测量 厘米级 很慢 高 非常困难 小范围区域 既有地形图 图上精度
(厘米级至米级)较慢 较低 困难 中小比例尺
地形采集航空摄影测量 厘米级至米级 较快 较高 容易 大型工程项目,
国家范围激光扫描、
干涉雷达厘米级 很快 很高 非常容易 高分辨率,适用于
各种范围 下载: 导出CSV
下载: 导出CSV
-
[1] 夏 宇,谭衢霖,蔡小培,等. 铁路BIM应用三维线路场景构建研究 [J]. 铁路计算机应用,2018,27(7):95-98. DOI: 10.3969/j.issn.1005-8451.2018.07.021 [2] 张 钰,董凤翔,赵亮亮,等. 基于BIM+GIS的铁路三维场景快速建立方法研究 [J]. 铁路技术创新,2021(4):27-31. [3] 王 玮. 基于三维GIS的铁路BIM空间信息系统构建及其工程应用 [J]. 测绘通报,2020(7):138-142. [4] Sherong Zhang, Dejun Hou, Chao Wang, etal. Integrating and managing BIM in 3D web-based GIS for hydraulic and hydropower engineering projects [J]. Automation in Construction, 2020, 112(4).
[5] 李永才. 基于WebGL的铁路三维虚拟踏勘与遥感判释系统设计与实现[D]. 成都: 西南交通大学, 2019. [6] 付品德, 秦耀辰, 闫卫阳, 等. Web GIS原理与技术[M]. 北京: 高等教育出版社, 2018. [7] 宋伟华,谭衢霖,夏 宇,等. 线路工程带状走廊三维地形构建及轻量化研究 [J]. 铁路计算机应用,2020,29(1):29-33. DOI: 10.3969/j.issn.1005-8451.2020.01.006 [8] 朱 颖, 吕希奎, 许右顶, 等. 铁路三维地质选线理论与方法[M]. 北京: 中国铁道出版社有限公司, 2019. [9] 刘智敏. 建筑信息模型(BIM)技术与应用[M]. 北京: 北京交通大学出版社, 2020. [10] 梁月吉,谢劭峰,庞光锋. 基于Matlab的坐标转换程序设计 [J]. 地理空间信息,2014,12(2):124-125,129. DOI: 10.11709/j.issn.1672-4623.2014.02.044 -
期刊类型引用(7)
1. 赵帅锋. 面向铁路工务设备养护管理的三维WebGIS平台研究. 铁道勘察. 2024(03): 51-56+102 .  百度学术
百度学术
2. 彭涛. 基于.NET6的铁路BIM可视化综合应用系统研究. 铁路计算机应用. 2023(02): 53-57 . 本站查看
3. 吕晓煜,熊丹,赵振洋. 基于无人机航摄的铁路工务智能分析系统应用. 铁道勘察. 2023(02): 19-22 . 百度学术
4. 陈昱行. 基于多源数据的高铁运营监测数据管理系统研发. 铁道勘察. 2023(04): 35-41 . 百度学术
5. 杨文东,张银虎,刘强,明杰,郑伦英,黄新文,吕东,李伟,张顺顺. 基于三维大场景的铁路数字勘察与设计优化技术研究及应用. 铁道标准设计. 2023(10): 1-7+14 . 百度学术
6. 涂文博,孔紫亮,张鹏飞,刘林芽,宋立忠,张洪. 基于BIM技术的铁路路基设计施工应用现状及发展趋势. 华东交通大学学报. 2023(05): 106-119 . 百度学术
7. 张娜. 生态环境信息管理中WebGIS的运用策略探究. 皮革制作与环保科技. 2022(22): 172-174 . 百度学术
其他类型引用(3)































计量
- 文章访问数: 201
- HTML全文浏览量: 151
- PDF下载量: 102
- 被引次数: 10
