

Analysis and application of high-speed railway disaster monitoring data
-
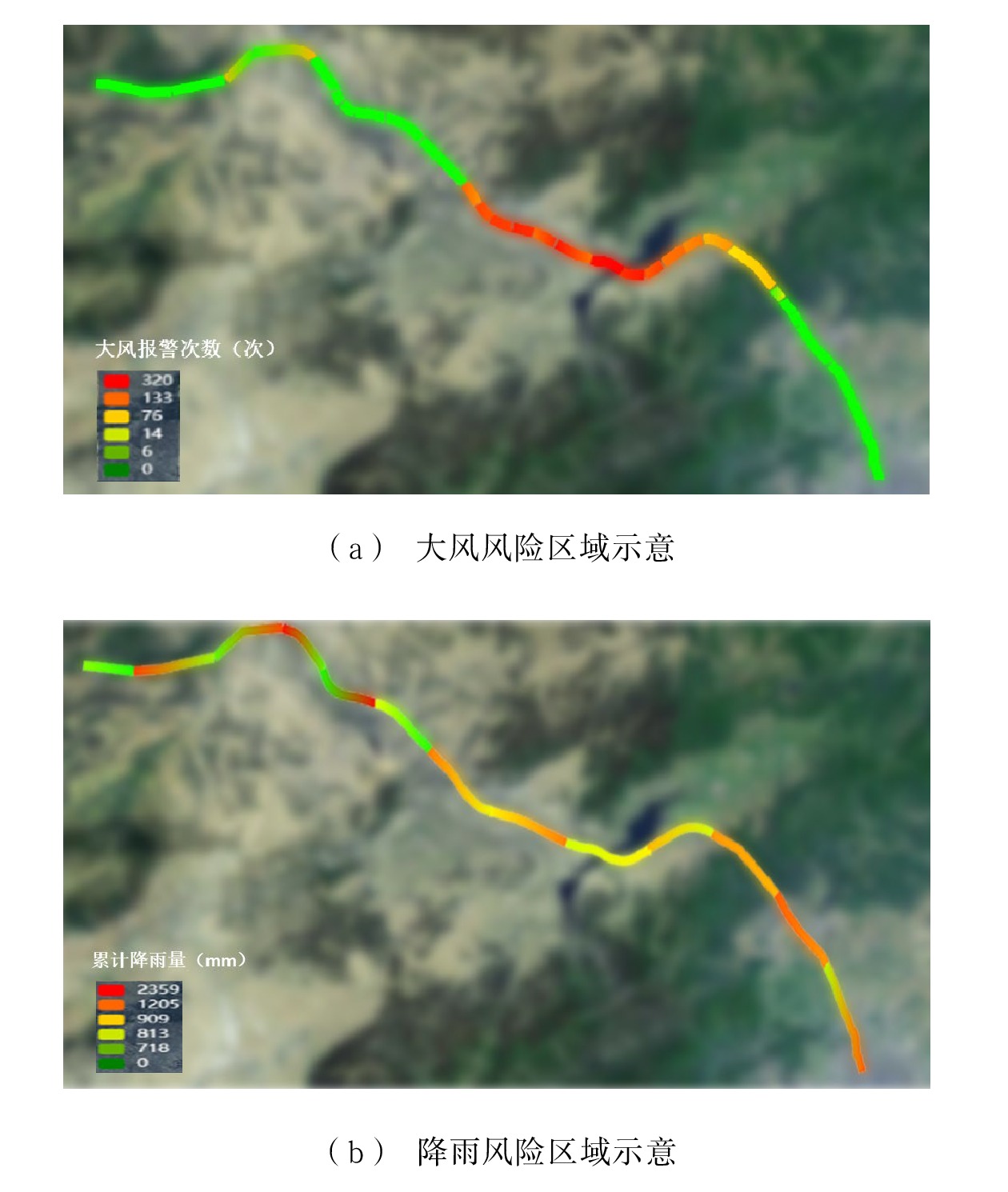
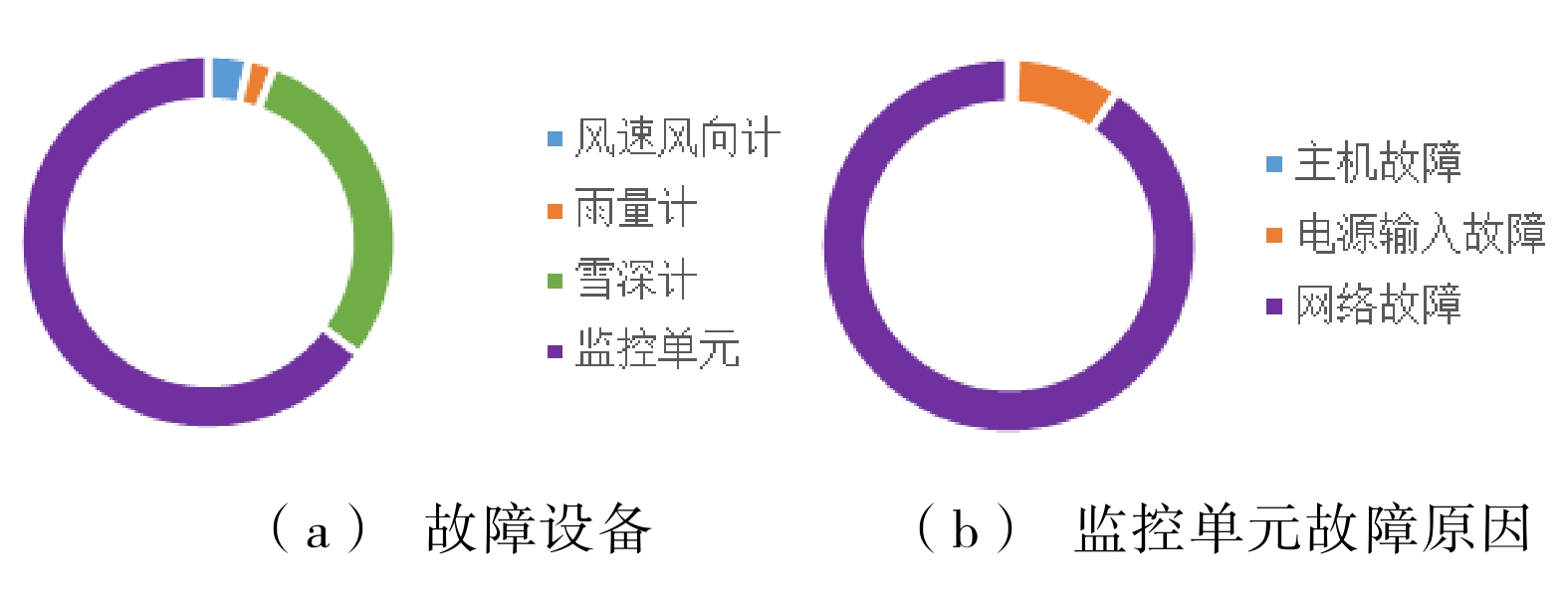
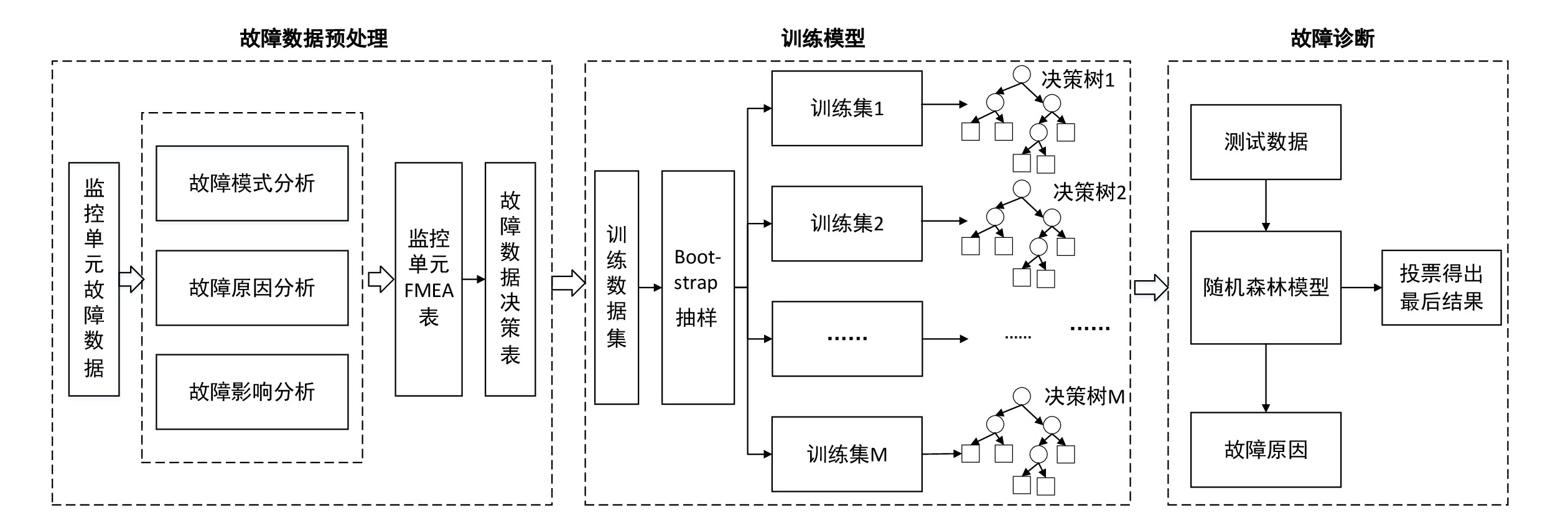
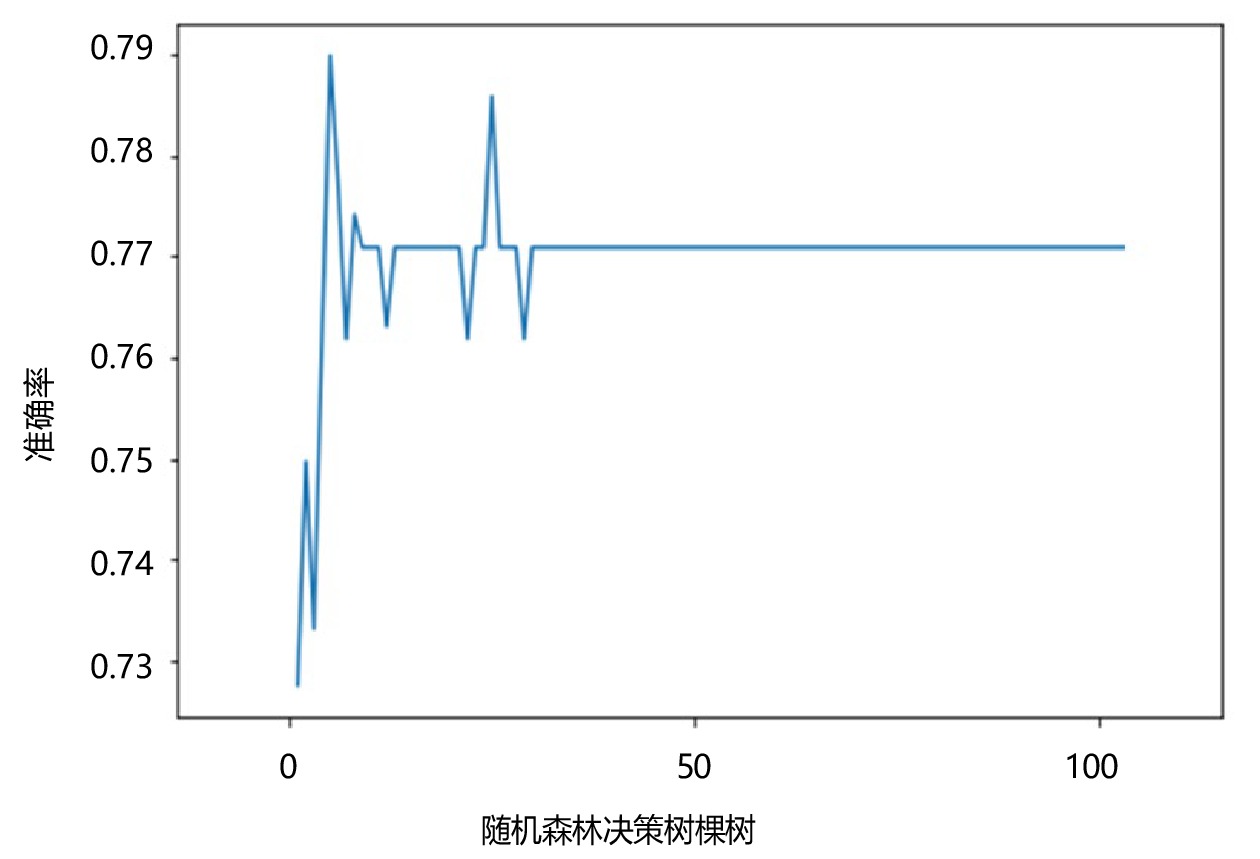
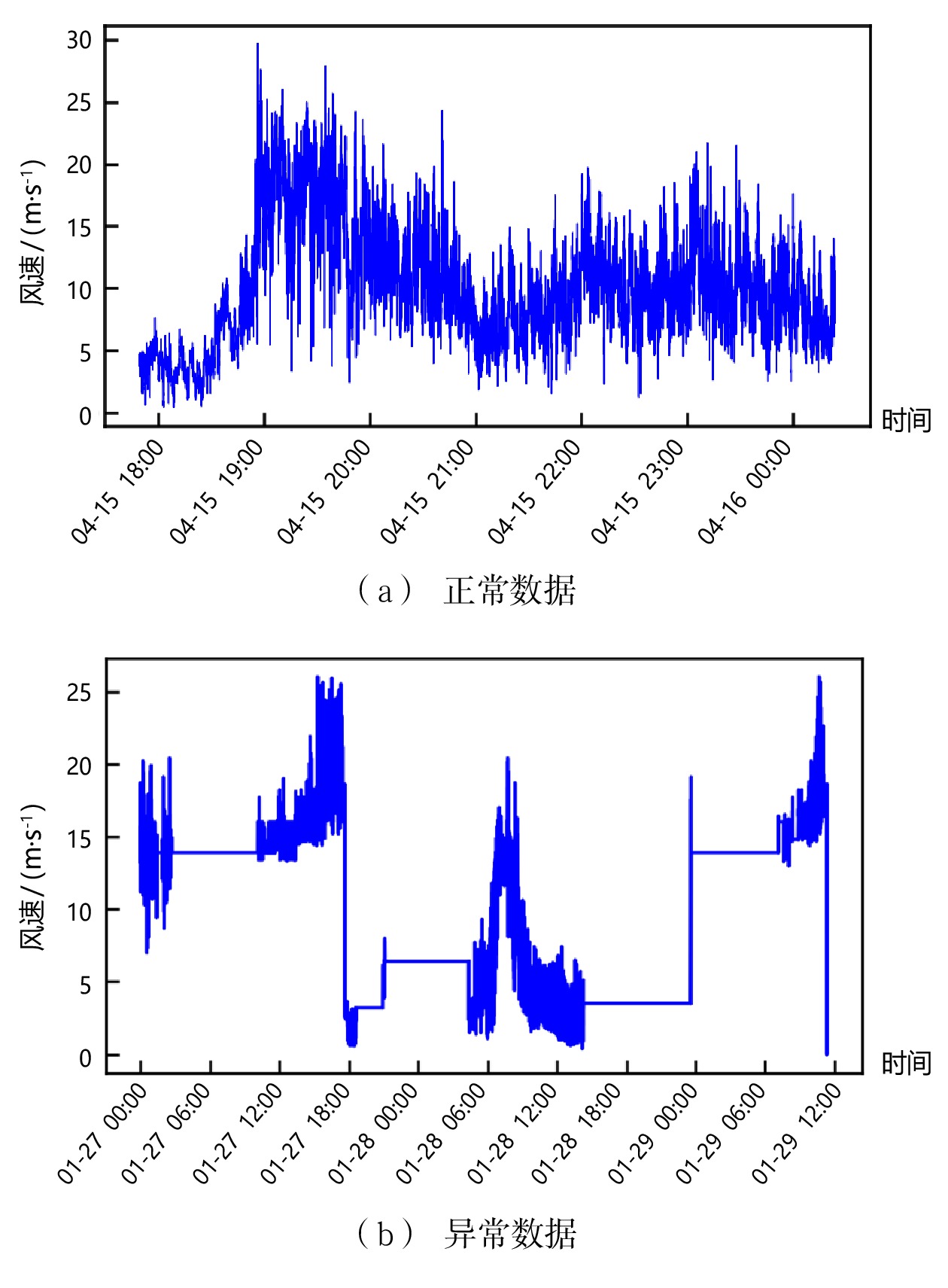
摘要: 高速铁路自然灾害及异物侵限监测系统(简称:灾害监测系统)的运行与维护(简称:运维)工作是保障系统可靠运行的基础,灾害监测报警及设备状态数据的分析应用,可为系统运维提供决策支撑。文章概述了灾害监测系统的运维管理工作,对风监测异常数据进行了研究,提出了风速风向计异常数据判识方法;通过分析灾害报警数据开展高速铁路沿线大风、强降雨灾害风险识别研究;对系统故障数据进行分析,提出了基于失效模式与影响分析(FMEA ,Failure Mode and Effects Analysis)和随机森林算法的监控单元故障诊断方法。试验表明,诊断准确率可达77%,为灾害监测系统运维提供参考。Abstract: The operation and maintenance of high-speed railway Natural disaster and foreign matter intrusion monitoring system(abbreviation: disaster monitoring system)is the basis to ensure the reliable operation of the system. The analysis and application of disaster monitoring alarm and equipment status data can provide decision support for system operation and maintenance. this paper summarized the operation and maintenance management of disaster monitoring system, studied the abnormal data of wind monitoring, and put forward the identification method of abnormal data of anemometer, identified the strong wind and rainfall disaster risk along the high-speed railway through the analysis of disaster alarm data, analyzed the system fault data, proposed a fault diagnosis method of monitoring unit based on Failure Mode and Effects Analysis(FMEA) and random forest. The example shows that the diagnosis accuracy can reach 77%. The research result can provide reference for the operation and maintenance of disaster monitoring system.
-
Keywords:
- high-speed railway /
- disaster monitoring /
- abnormal data /
- risk identification /
- fault diagnosis
-
城市轨道交通在为居民提供便捷乘车服务的同时也产生了巨大的能源消耗[1]。据统计,牵引能耗为列车运行的主要消耗[2]。荀径对列车节能操纵优化求解方法进行了综述[3];许立、耿晨歌采用遗传算法对列车运行速度曲线生成进行研究,但评价模型过于苛刻[4-5];丁圣采用非支配排序遗传算法研究列车多目标操纵优化,运算复杂度较高[6];刘炜采用时间逼近搜索算法建立节能优化模型,但未考虑舒适度要求[7]。本文根据惰行控制理论[8],建立分段渐进式的评价模型,并将舒适度要求纳入约束条件,采用改进的差分进化(DE,Differential Evolution)算法研究列车节能优化速度曲线的生成,以减少列车牵引能耗。
1 问题分析与模型构建
1.1 问题分析
城轨列车节能问题本质上是一个多目标优化问题,包含列车准时到达、定点停车和牵引能耗最小的目标。多目标问题求解可将多目标转化为单目标,或是直接采用多目标优化方法。采用Pareto非支配排序方法可对多目标问题进行求解[9],但实验研究表明,仅数代之后,种群中的个体都进化为Pareto非支配个体,此时再将Pareto非支配个体作为最优解的评价标准将失去意义[10]。因此本文采用建立各目标的评价模型,再通过权重分配合成单目标的方法。
1.2 力学模型与能耗计算
本文采用多质点列车模型,遵循如下假设条件:
(1)列车为质量分布均匀的刚体,是由足够多数量的质点组成的质点链;
(2)不考虑车钩间作用力对列车的影响;
(3)牵引和制动级位各5级。
在列车运行过程中,作用在列车上的运行方向的力分为3类:牵引力、运行阻力和制动力。
以列车沿斜坡向上运行为例,如图1所示,其中F、B、W分别为列车受到的牵引力、制动力、阻力,F与运动方向一致,B、W与运动方向相反;N为支持力;G为重力。则列车沿运动方向所受合力Fh为:
Fh=F−W−B (1) 列车牵引力、制动力主要与列车型号、列车运行速度有关。当列车处于牵引状态时,B为0;处于惰行状态时,F和B均为0;处于制动状态时,F为0。
列车运行阻力一般由基本阻力和线路附加阻力组成。基本阻力公式如下:
w0=a+bv+cv2 (2) 其中,w0为单位基本阻力;a、b、c为经验常数,v为列车速度。
线路附加阻力主要包括坡道附加阻力和曲线附加阻力。当单列车厢处于不同的坡道上时,其坡道附加阻力ws为:
ws=G⋅LsL⋅y11000+G⋅L−LsL⋅y21000 (3) 其中,车厢一长为Ls部分处在千分坡度数为y1的坡道上,车厢另一长为L–Ls部分处在千分坡度数为y2的坡道上;G为该车厢重量。如果单列车厢位于同一坡道,则只需计算该公式的前半部分即可。
同理,单列车厢位于不同的曲线半径,其曲线附加阻力wr为:
wr=600R1⋅G1000⋅LrL+600R2⋅G1000⋅L−LrL (4) 其中,车厢一长为Lr部分处在半径为R1的弯曲线路上,车厢另一长为L–Lr部分处在半径为R2的弯曲线路上。
将各个车厢所受阻力相加,即为列车受到的总阻力W。
{W=n∑i=1wsi+wri+w0iF=f_force(v,ws)B=f_brake(v,ws)Fh=F−W−BA=Fh(1+r)M (5) 其中,i为车厢号,i=1,···,n,n为车厢数;A为列车加速度;r为列车旋转质量系数,M为列车质量;以时间步长0.1 s,得到列车在各时间步长内的参数计算公式。f_force(v,ws)、f_brake(v,ws)分别为牵引力、制动力计算函数,与列车速度v和工况状态ws有关。
牵引能耗是列车运行过程中牵引力做的功,计算公式如下:
E=n∑iFi⋅ΔSi (6) 其中,n为根据牵引力的改变而划分的区段数;Fi、∆Si分别为第i段的牵引力和牵引力作用的距离;i=1,···,n;E为列车牵引力在站间所做的功,即牵引能耗。
1.3 列车运行工况转换原则
根据惰行控制方式,列车运行由牵引、惰行和制动3种工况组成,工况转换需要满足转换规则才能进行,如表1所示。
表 1 工况转换规则当前工况 待转工况 惰行 制动 牵引 惰行 —— 可以 可以 制动 可以 —— 禁止 牵引 可以 禁止 —— 2 改进DE算法
DE算法是Rainer Storn等人于1995年提出的一种采用实数编码模拟生物进化的算法,具有高效的全局搜索效果和收敛性能 [10]。但在求解多目标最优化问题时,有易过早收敛、陷入局部最优等问题。本文对现有的DE算法进行改进,根据多目标优化的特点提出了新的交叉策略,提升基于DE进化策略的收敛性能和全局搜索能力。
改进算法对种群进行约束条件下的初始化,经变异和改进的交叉策略,再通过评价模型得到个体适应值,选出高适应个体组成下一代种群,使种群进化反复循环,直到满足终止准则,则算法结束,如图2所示。
2.1 个体基因设计与初始化种群
本文采用位置与工况状态值组合的实数编码对个体基因进行设计,位置向量组和工况状态组均包含D个点,起始点位置为0,工况状态为牵引工况,末点位置为目标停车点Se、工况状态为制动工况。种群的个体基因组合GE为:
{GE=[g1,g2,⋅⋅⋅,gD]gi=si⋅100+wsi (7) 其中,gi表示第i个点的个体基因,i=1,···,D,由位置si和工况状态值wsi组合而成。
根据1.2小节的假设条件,牵引和制动级位各5级,如表2所示。其中工况值1 ~ 5分别代表制动输出19%、39%、59%、79%、99%,6 ~ 10分别代表牵引输出19%、39%、59%、79%、99%。
表 2 工况状态值工况 惰行 制动 牵引 工况值 0 [1 ~ 5] [6 ~ 10] 在种群初始化过程中,生成的个体需要约束,以筛选初始种群,其流程如图3所示。
2.2 约束条件分析
本文以区间限速、最大加速度、最大减速度、运行工况转换原则和牵引制动特性做为约束条件,将舒适度也纳入其中[11],约束条件为:
{min(q⋅Jve+p⋅JE+y⋅Jse+(1−q−p−y)⋅Jte)wsRequire=workStatePrncp(workstate)Co=average(6⋅√a2t+d2t)s.t{wsRequire=true0⩽ (8) 其中,Jve、Jse、JE和Jte分别是末速度、末位置、牵引能耗和运行时间评价值;q、p、y分别是末速度、能耗和末位置评价值所占适应度函数的权重,1–q–p–y为运行时间评价值的权重,min为所有个体中的最小值;wsRequire为工况评价值,为true表满足工况转换原则;workstate为列车运行工况转换序列;workStatePrncp是工况转换原则判断函数;Co为舒适度评价值,其值小于4时,舒适度满足要求;vt、at、dt、Ft、Bt分别为t时刻列车运行速度、加速度、减速度及受到的牵引力、制动力;Ft,max、Bt,max为t时刻可输出的最大牵引力、最大制动力;Vt,max为线路在时刻t的最大允许速度;Amax、Dmax为最大允许加速度、最大允许减速度。
2.3 目标评价模型与终止准则
为了保证个体较好的适应性和全局收敛性,结合本文的节能优化模型,基于Matlab进行实验仿真,建立了分段渐进式评价模型,如图4~图7所示。评价模型在形式上保持一致,可有效抑制种群优化趋势向某个目标倾斜,保证种群优化的目标多样性。
末速度评价模型对个体的末速度在0 ~ 80 km/h之间进行分段评价,其评价值范围为0 ~ 10 000,末速度超出80 km/h按最高记。牵引能耗评价模型、停车位置误差和运行时间误差评价模型也类似。
种群终止准则是种群停止进化的一个标准。根据实测数据,如图8所示,在60代以内的收敛幅度较大,60代以后,收敛幅度趋于平缓。故本文设置迭代次数为100,即可达到预期效果。
3 算法参数设计与中间参数生成
改进DE算法包含2个重要参数:缩放因子和交叉概率。
3.1 缩放因子
缩放因子Fs是控制差分矢量对基向量影响大小的参数。本文对Fs的取值进行了测试,Fs为0.5时,收敛效果好,如表3所示。
表 3 缩放因子对收敛的影响缩放因子取值 收敛效果 (0, 0.3] 不收敛 0.4 收敛速度慢 0.5 收敛速度快 [0.6, +∞) 不收敛 3.2 交叉策略的改进
为进一步增强种群多样性,DE算法交叉目标个体Xk(ts)与变异个体Vk(ts+1),产生候选个体Uk(ts+1),ts代表迭代的代数,k表示第k个个体。
采用DE算法的交叉策略求解发现,下一代个体中变异个体较少,使算法的收敛效果较差。个体被淘汰的原因有:变异个体的基因值不符合个体基因向量组的要求,交叉概率使一部分个体淘汰。
为使变异个体有效,对变异策略进行如下改进:
(1)对变异的无效个体进行有效化处理。
v_{kj} = v_{kj}\frac{{S_{\rm{e}} \cdot 100 + WS_{\rm{e}}}}{{v_{kD}}},j = 1,2, \cdot \cdot \cdot ,D (9) 其中,vkj和vkD分别为变异个体Vk(ts+1)中的第j维分量和第D维分量,WSe为制动工况值。
(2)增大交叉概率为1,使收敛效果最好。
3.3 中间数据生成
图9为个体末速度生成流程,其他数据生成也类似。
4 算例分析
本文采用文献[7]中提供的上海地铁的线路数据,如表4~表6所示;实现带线路区段限速的列车自动运行(ATO,Automatic Train Operation)曲线生成。列车型号为AC-03,车长144 m,AW2质量327.6 T,牵引特性[8]如图10所示。
表 4 线路坡度起点/m 终点/m 坡度/‰ 0 230 3.1 230 430 2.9 430 630 30.1 630 880 30 880 1 200 4.05 1200 1 810 0 表 5 线路曲线起点/m 终点/m 曲线半径/m 181 373 355 394 609 350 846 1 341 404 1396 1 730 704 表 6 线路限速起点/m 终点/m 区段限速/km·h-1 0 609 62 609 1 710 75 1710 1 810 35 如图11可知,随着迭代次数的增加,个体评价值不断减小,个体适应度不断提高,表明算法的收敛效果良好。
图12是算法生成的最优ATO速度曲线。图13是工况距离曲线,列车在平坡段施加牵引力加速,然后进行缓慢牵引,在上坡段惰行一段时间,最后施加制动减速停车。在满足区间运行时分的前提下,尽可能地利用了线路优势,减少了牵引能耗。其牵引能耗为28.8 kW·h,较文献7节能38%。
5 结束语
本文采用多质点模型分析列车运动情况,基于改进的DE算法,分析线路约束条件,建立评价模型,构建适应度函数,使种群向低能耗、末速度小的方向进行优化。以上海地铁3号线数据为例,经仿真试验,牵引能耗28.8 kW·h,生成的ATO速度曲线,在满足定点准时停车的前提下,达到了节能的目标,证明改进DE算法可用于解决列车节能优化速度曲线问题。但该算法在限速较多的区段,速度曲线计算时间较长,仍需进一步研究和改进。
-
表 1 监控单元故障诊断FMEA表
故障现象 故障原因 故障影响 UPS故障告警 UPS输入故障 设备状态报警 UPS电压异常 UPS故障 其他施工作业导致市电断电 市电输入不稳 配电箱故障 市电输入不稳 设备状态报警 串口心跳告警 基站内通信元件损坏 设备状态报警 防雷模块故障报警 数据远程传输单元防雷模块损坏 设备状态报警 监控主机故障报警 监控主机故障 设备状态报警 数据采集异常 监控主机故障 无数据上传 脱离监控 基站内通信元件损坏 灰屏 监控主机故障 雷击导致设备故障 异物继电器无法吸起 保险管损坏 设备状态报警 异物列控回采状态不一致 雷击导致设备故障 设备状态报警 指示灯不亮 监控主机故障 设备状态报警 主机网络故障 RTU反应迟钝 设备状态报警/无数据上传 其他施工作业导致 监控主机故障 主机网络水晶头虚接 注: ①UPS:不间断电源(Uninterruptible Power Supply);
②RTU:远程终端单元(Remote Terminal Unit) 下载: 导出CSV
下载: 导出CSV
-
[1] 张翠兵. 异物侵限监测子系统运用失效的故障树分析 [J]. 铁路计算机应用,2016,25(1):4-7. DOI: 10.3969/j.issn.1005-8451.2016.01.003 [2] 李亚群,姜 勇,雷 震,等. 高速铁路自然灾害及异物侵限监测系统监控单元设备可靠性验证试验方法研究 [J]. 铁路计算机应用,2013,22(12):25-27. DOI: 10.3969/j.issn.1005-8451.2013.12.007 [3] 周绍华. 浅谈异物侵限监测子系统维护 [J]. 铁道通信信号,2013(7):61-67. DOI: 10.3969/j.issn.1000-7458.2013.07.024 [4] 刘 岩. 高速铁路自然灾害及异物侵限监测系统可靠性研究[D]. 北京: 中国铁道科学研究院, 2015. [5] 李晓宇, 刘敬辉. 高速铁路自然灾害及异物侵限监测系统可靠性分析与优化研究[J], 中国铁路, 2019(5): 27-32. [6] 王娇娇,王 瑞,包 云,等. 高速铁路灾害监测系统现场监测设备脱离监控分析及改进措施研究 [J]. 铁路计算机应用,2018,27(6):48-52. DOI: 10.3969/j.issn.1005-8451.2018.06.012 [7] 中国铁路总公司. 高速铁路自然灾害及异物侵限监测系统维护试行办法[Z]. 中国铁路总公司, 2013. [8] 李 隆,王 瑞,张惟皎. 基于LSTM的高铁大风预测模型及算法研究 [J]. 铁路计算机应用,2021,30(2):18-21. [9] 魏昱洲,许西宁. 基于LSTM长短期记忆网络的超短期风速预测 [J]. 电子测量与仪器学报,2019,33(2):64-71. [10] 陈苏雨,方 宇,胡定玉. 基于随机森林方法的地铁车门故障诊断 [J]. 测控技术,2018,37(2):20-24. DOI: 10.3969/j.issn.1000-8829.2018.02.006 [11] 孙志鹏,孙志龙,魏 建. 基于决策树支持向量机算法的电力变压器故障诊断研究 [J]. 电气工程学报,2019,14(4):42-45. DOI: 10.11985/2019.04.006 [12] 赵锦阳,卢会国,蒋娟萍,等. 基于改进决策树的故障诊断方法研究 [J]. 成都信息工程大学学报,2018,33(6):624-631. [13] 周旺平,王 蓉,许沈榕,等. VMD能量熵与随机森林相结合的齿轮故障诊断 [J]. 机械设计与制造,2021(3):270-275. DOI: 10.3969/j.issn.1001-3997.2021.03.061 -
期刊类型引用(3)
1. 张晓冬. 基于VR技术的铁路调车作业安全仿真系统研究. 铁道货运. 2024(04): 32-37+45 .  百度学术
百度学术
2. 刘祯祥,党建武,王阳萍,岳彪,王文润. 铁路机车车载设备数字孪生体构建方法研究. 铁道通信信号. 2023(03): 8-13 . 百度学术
3. 张晓梅 ,鲁工圆 ,彭其渊 ,李力 ,何必胜 . 大型编组站作业仿真实验平台建设与实验教学. 实验科学与技术. 2023(03): 29-35 . 百度学术
其他类型引用(1)






















计量
- 文章访问数: 198
- HTML全文浏览量: 81
- PDF下载量: 28
- 被引次数: 4
