

Cooperative control scheme for operation control system of 600 km/h high speed maglev train
-
摘要: 介绍时速600 km高速磁浮运行控制系统的构成及原理,研究运行控制系统在其他系统协同配合下完成轨道控制、列车控制、牵引控制的方案,并介绍运行控制系统与其他系统的接口及控制内容。结合运行控制系统的功能,进一步说明实现对时速600 km高速磁浮列车的运行控制需要其他系统的协同配合。研究结果表明,运行控制系统是高速磁浮列车关键系统之一,对高速磁浮列车的控制还需要牵引控制系统、车辆系统等其他系统的协同配合。Abstract: This paper introduced the composition and principle of the high-speed maglev operation control system with a speed of 600 km/h, and studied the scheme that the operation control system completed track control, train control and traction control under the cooperation of other systems, and described interfaces and control contents between the operation control system and other systems. Combined with the functions of the operation control system, it further showed that the operation control of 600 km/h high-speed maglev train needed the cooperation of other systems. The results show that the operation control system is one of the key systems of high-speed maglev train. The control of high-speed maglev train also needs the cooperation of traction control system, vehicle system and other systems.
-
高速磁浮列车作为新型交通工具,其运行速度接近航空运输的运行速度,客运容量与高速铁路(简称:高铁)动车相当。与传统的轮轨高铁相比,高速磁浮列车具有噪声小、速度快、相同运力条件下能耗低、无脱轨风险、安全性高,以及乘坐舒适、方便快捷等优点,能够较好地满足人们的出行需求,是未来轨道交通发展的方向[1]。
1 研究背景
现阶段,我国正在统筹推进“交通强国”发展战略。中共中央、国务院发布了《交通强国建设纲要》,提出要强化前沿关键科技研发,合理统筹安排时速600 km级高速磁悬浮系统、时速400 km级高速轮轨(含可变轨距)客运列车系统、低真空管(隧)道高速列车等技术储备研发[2]。高速磁悬浮技术研究已掀起一番新热潮,我国正在开展一批高速磁悬浮技术的研究和工程项目,例如,粤港澳大湾区广深港高速磁浮铁路工程、济南—泰安—曲阜高速磁浮项目,并有望在“一带一路”倡议的契机下推动磁悬浮技术走出去[3],因此高速磁浮列车核心技术的研发至关重要。
运行控制系统是高速磁浮列车的中枢控制系统,控制并确保列车的安全运行。由于高速磁浮列车运行控制系统(简称:运行控制系统)与传统的轮轨高铁列车控制系统存在较大区别[4-5],除了保证安全距离控制速度外,还需保证列车在轨道上悬浮,司机对高速磁浮列车的控制能力有限,传统的轮轨高铁列车控制系统控制模式无法满足高速磁浮的控制需求[6],因而,针对高速磁浮列车的运行控制,需要研究新的控制方案。目前,运行控制系统的研究内容主要是速度防护及停车区域设置[7],而对与其他系统之间接口的研究较少。
为了解决运行控制系统与其他系统之间接口的问题,本文主要研究时速600 km高速磁浮列车运行控制系统对其他关键系统的控制,通过与其他系统的接口,实现运行控制系统的主要功能,为后续开展高速磁浮工程建设奠定基础。
2 运行控制系统
高速磁浮铁路包括3个关键系统,分别为车辆系统、牵引供电系统和运行控制系统,其中,车辆系统主要负责高速磁浮列车的悬浮及导向;牵引供电系统主要为高速磁浮列车提供运行所需的牵引动力;运行控制系统主要完成列车调度、安全定位、系统防护及通信等功能。此外,高速磁浮列车还有轨道系统、通信系统、防灾系统等。上述系统相互配合,共同完成高速磁浮列车的运行及控制。运行控制系统是一种安全系统,遵循故障−安全原则,具有很高的自动控制和安全防护特性,采用自动或人工方式来实现高速磁浮列车的正常运行。
2.1 运行控制系统架构
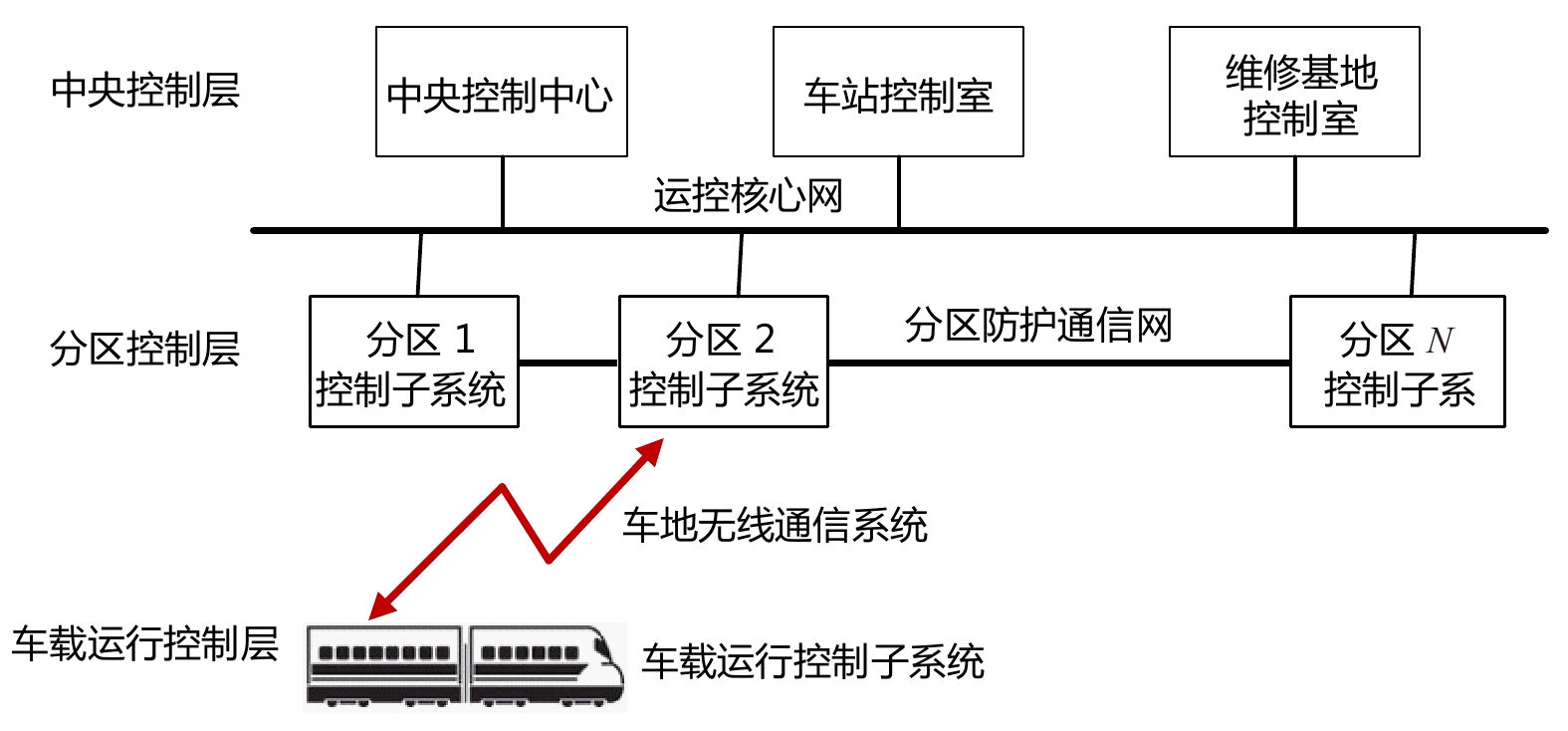
运行控制系统为三层架构,分别是中央控制层、分区控制层和车载运行控制层[8]。各控制层之间及控制层内部的通信由通信网连接,其中,中央控制层与分区控制层之间的通信采用运行控制核心网,分区控制层与车载运行控制层之间的通信采用车−地无线通信技术。运行控制系统架构,如图1所示。
2.1.1 中央控制层
中央控制层主要负责全线行车的调度及安全运行,是运行控制系统的“大脑”。中央控制层的主要功能包括制订列车运行计划和运行图、按照行车计划组织和调度列车的运行、监督整条高速磁悬浮线路的列车运行状况、对运行控制系统的各个子系统进行自动诊断和报警,并输出设备故障信息、记录存储运行过程的数据进行等。
中央控制层的设备主要布置在中央控制中心,主要包括列车自动调度(ATO,Automatic Train Operation)系统、操作员终端系统(中央操作员终端、站级操作员终端、维修基地操作员终端)、中央诊断终端系统,以及网络交换机等设施设备,并留有与乘客信息系统及防灾系统等交互的接口。
(1)ATO系统可以降低操作员的工作强度,根据事先设置的行车时刻表,自动实现列车运行调度。
(2)操作员终端主要实现分区控制层的分区控制子系统和ATO系统的操作和显示。
(3)中央诊断终端系统显示所有操作员终端输出的诊断信息,并向维护人员提供故障诊断和参考信息。
2.1.2 分区控制层
运行控制系统将高速磁浮列车运行范围划分为多个运行控制分区,每个运行控制分区包含一个分区控制子系统。各分区控制子系统负责完成列车运行的行驶顺序控制、进路防护、道岔防护、牵引切断等功能,同时还与车载运行控制层的车载运行控制子系统一起,共同实现高速磁浮列车的防护、安全定位、速度曲线监控等功能。各分区控制子系统构成分区控制层,是运行控制系统的实现手段。
运行控制系统与牵引供电系统关系紧密。运行控制分区的划分与牵引供电分区完全对应,各分区控制子系统设置于各牵引变电站内的信号设备室。每个分区控制子系统包括分区控制计算机、分区安全计算机、分区传输计算机、分区牵引切断模块、分区道岔模块等设施设备,其中,分区牵引切断模块与牵引供电系统的功率模块相对应,分区道岔模块与轨道的道岔设备相对应。
(1)分区控制计算机负责控制对应运行控制分区的高速磁浮列车运行,根据高速磁浮列车、牵引供电系统等相关参数确定高速磁浮列车的运行模式。
(2)分区安全计算机是每个运行控制分区的核心设备,执行轨道防护、进路防护、列车管理、安全操作及显示、牵引切断、分区控制子区段划分、分区交接、速度曲线监控、列车定位等与行车安全相关的功能。
(3)分区传输计算机实现各分区控制子系统与车载运行控制子系统之间无线通信的安全连接和数据交换。
(4)分区牵引切断模块是运行控制系统对牵引供电系统进行安全监控与防护的关键部件,负责在牵引供电系统发生故障或其他运行条件下安全地切断高速磁浮列车的牵引驱动。
(5)分区道岔模块负责对道岔的安全控制和防护,包括道岔的锁闭、解锁、转换、位置确认和动力电的安全切断。
2.1.3 车载运行控制层
车载运行控制层又称车载运行控制子系统,是高速磁浮列车安全运行的重要保障。主要功能包括开启和关闭车载电源、强制停车管理、运行模式变更、安全定位、列车悬浮控制、速度曲线监控、涡流制动、车载控制设备的监控、释放受流器、车门控制等。
每辆高速磁浮列车配置一套车载运行控制子系统,车载运行控制子系统设备主要由采用安全冗余架构的车载安全计算机组成。高速磁浮列车的两端驾驶室内各设置一套车载安全计算机。列车两端的车载安全计算机之间通过数据线接口连接,并采取相应的防护措施来实现安全数据传输。车载运行控制层设备通过车载传输计算机,以及车−地无线电设备实现与分区控制设备之间的通信。
2.2 运行控制系统控制原理
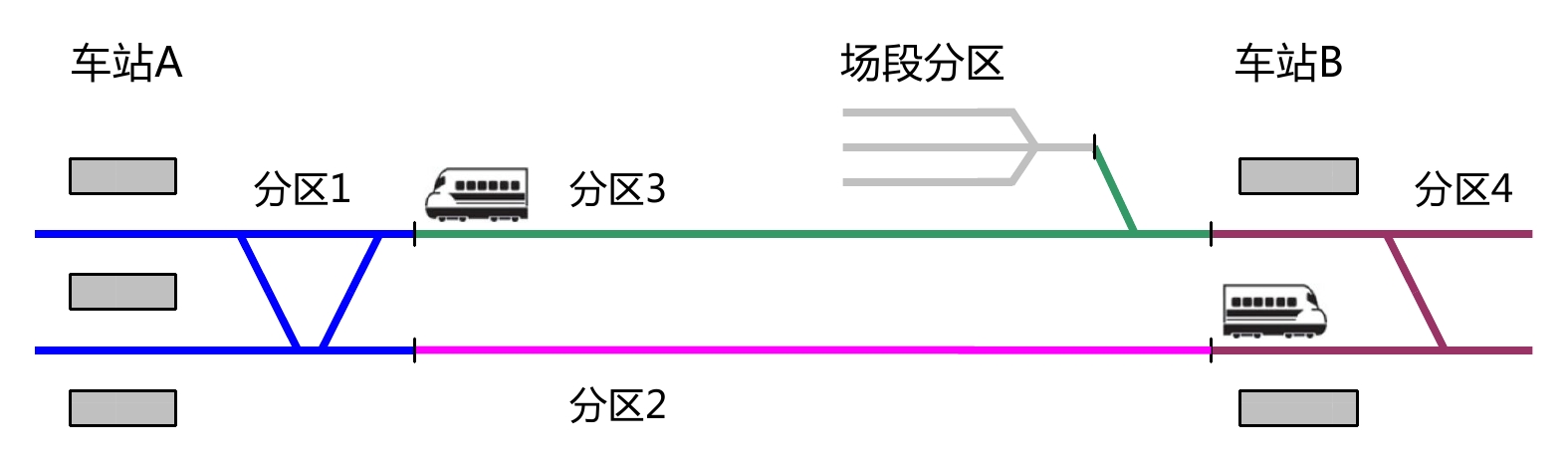
高速磁浮列车的控制方式与传统轮轨列车存在一定的差异,其运行控制系统与牵引供电系统之间的耦合度和集成度高,与牵引供电系统的接口复杂且紧密。高速磁浮列车的运行控制及安全防护由运行控制系统和牵引供电系统共同完成。运行控制系统将高速磁浮列车的运行范围划分为多个运行控制分区,每个运行控制分区范围与牵引供电分区一一对应,正线每个运行控制分区范围内只允许对一辆高速磁浮列车提供牵引力。运行控制分区划分示意如图2所示。高速磁浮列车通过地面无线设备及车载无线设备进行高速磁浮列车定位,通过速度防护功能对高速磁浮列车当前位置的速度进行监视,确保高速磁浮列车速度在所设定的速度范围之内,处于安全驾驶状态。当高速磁浮列车正常运行时,运行控制系统执行自动驾驶功能,依据列车行车时刻表来确定驾驶参数,自动调度高速磁浮列车运行,无须人工干预。
运行控制系统的自动驾驶主要依靠中央控制层。当高速磁浮列车正常运行时,中央控制层的ATO系统根据列车行车时刻表,自动下发进路指令给分区控制子系统,由分区控制子系统完成进路办理、道岔防护、速度防护曲线计算等功能,并将线路数据、速度防护曲线等信息发送给车载控制子系统。高速磁浮列车接收并处理调度指令或驾驶员控制台下达的指令,完成对高速磁浮列车的驾驶顺序控制。
3 高速磁浮列车系统之间的协同控制
高速磁浮列车各系统间联系紧密,通过对运行控制系统的构成及原理分析,对高速磁浮列车的控制还需要完成关键系统配合,主要体现在轨道控制、列车控制和牵引控制。关键系统的统筹管理通过多项联动,共同保证高速磁浮列车的行车安全。
3.1 轨道控制
轨道控制主要对高速磁浮列车定位及道岔位置进行控制。运行控制系统在管控各个运行控制分区时,通过轨道控制功能将各运行控制分区进一步划分为多个轨道区段。轨道区段是构成进路的基本单元,轨道区段的占用和出清通过高速磁浮列车定位和与运行控制系统中线路电子地图的映射计算实现。
运行控制系统根据高速磁浮列车的最大速度限制曲线和制动曲线参数,实时计算高速磁浮列车当前位置到前方停车点的距离,并把计算得到的速度曲线发送给牵引供电系统。相关参数通过分区控制子系统的分区安全计算机获得,如果高速磁浮列车的停车点在下一个运行控制分区,则相关数据被传送到下一个运行控制分区的运行控制子系统设备,由下一个运行控制分区的运行控制子系统计算相应速度曲线和制动曲线,实现高速磁浮列车定位及速度防护。
运行控制系统与轨道系统之间的接口位于分区道岔模块与线路道岔及道岔控制系统处的接口,该接口用于实现运行控制分区内运行控制系统对轨道道岔的移动控制和状态检测,实现对道岔的控制。分区道岔模块是道岔系统控制的最高层。当移动道岔时,分区道岔模块先向道岔驱动供电单元提供电源释放命令,然后向道岔控制机发出移动道岔的指令报文指示道岔移动的位置。当道岔移动结束后,分区道岔模块通过读取道岔上的位置传感器判断道岔是否到位。
3.2 列车控制
列车控制主要对每辆高速磁浮列车的状态、上线高速磁浮列车数量进行控制。运行控制系统依据高速磁浮列车的运行状况对高速磁浮列车状态进行控制,从行车角度来分,列车状态包括运行、停止和存车这3种;从牵引供电系统角度来分,列车状态包括当前和虚拟两种。
(1)运行状态指运行控制系统已为高速磁浮列车分配了牵引供电系统,并完成了进路排列,高速磁浮列车可以在通过规定的检查后悬浮并开始行车。
(2)停止状态是指运行控制系统对高速磁浮列车进行轨道区段预锁闭,高速磁浮列车已准备开始运行或刚刚中止运行的状态,当某个运行控制分区内已有一列高速磁浮列车处于运行状态时,则该分区的控制设备将允许另有一辆高速磁浮列车处于停止状态,当某个运行控制分区内没有高速磁浮列车处于运行状态时,则该分区控制系统可容许有两辆高速磁浮列车处于停止状态。
(3)存车状态的高速磁浮列车已经在运行控制系统中完成登录,但运行控制系统没有为该列车的运行分配任何进路,该列车占用了一个轨道区段,高速磁浮列车的位置和方向等数据已被运行控制系统所获得。
(4)当前状态与运行和停止状态对应。牵引供电系统可以驱动处于当前状态的高速磁浮列车。
(5)虚拟状态与存车列车状态对应。牵引供电系统不可以驱动处于虚拟状态的高速磁浮列车。
当ATO系统或调度员发出调度指令后,高速磁浮列车将进入列车状态调整阶段。为此,高速磁浮列车必须在相关系统进行登录,并且依次发出关门指令、悬浮指令。牵引供电系统也要对高速磁浮列车的牵引指令,使高速磁浮列车进入相应的列车状态,实现列车控制。
3.3 牵引控制
牵引控制主要对车辆牵引供电系统的状态进行控制,使牵引供电系统进入相应的运行状态。由于高速磁浮列车牵引变电站在其供电范围内只允许驱动一辆高速磁浮列车运行,因此运行控制系统的每个分区控制系统与牵引供电分区一一对应。运行控制系统与牵引供电系统之间的接口位于分区控制层的分区控制计算机及分区牵引切断计算机内,与牵引控制系统电机控制单元进行数据交换。
在列车运行前,运行控制系统分区控制计算机向牵引控制系统的电机控制单元发送线路数据、车辆参数、停车点、允许的最大速度曲线等信息,牵引控制系统的电机控制单元根据运行控制系统的各类数据信息及最大速度曲线计算该次运行的牵引运行曲线,并按照该曲线控制高速磁浮列车运行。在列车运行期间,运控系统监视列车运行的位置和速度,监测列车速度是否处于由最大速度曲线和最小速度曲线构成的安全速度范围之内。当高速磁浮列车速度超过最大速度曲线或者低于最小速度曲线时,采取措施使高速磁浮列车能够安全停在设定的停车点,从而让高速磁浮列车运行始终处于系统的安全防护之下。
当列车运行速度超过最大速度曲线或者低于最低速度曲线,又或者出现其他影响安全运行的故障时,运行控制系统的分区牵引切断计算机通过该接口向牵引变流器控制单元及变流器系统发出牵引切断指令,控制牵引变流器系统切断电流输出,从而切断牵引力,实现对牵引供电系统的控制。
4 运行控制系统与其他系统的接口
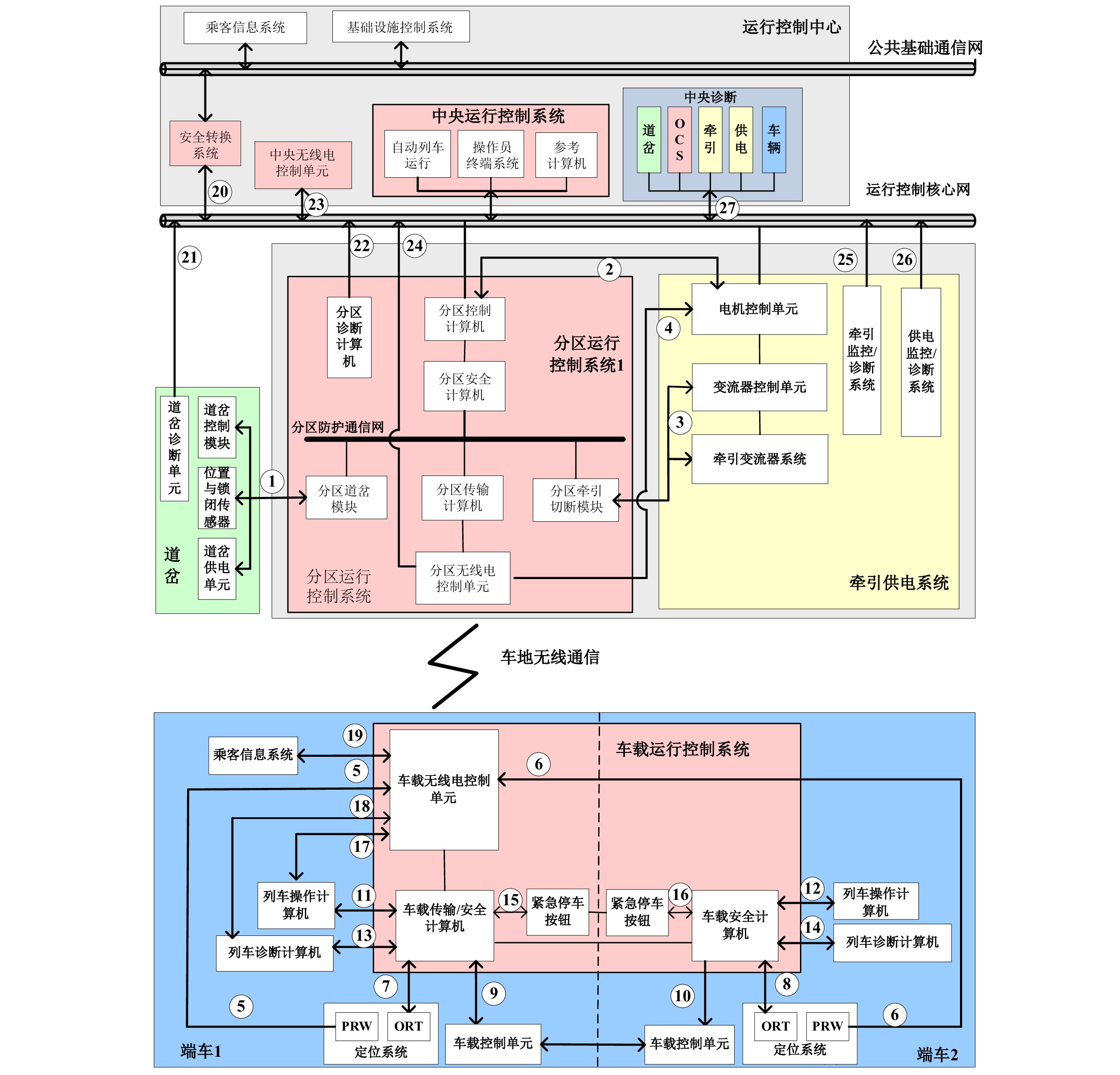
运行控制系统完成轨道控制、列车控制和牵引控制后即可实现对高速磁浮列车的基本运行控制,进而实现运行控制系统的主要功能,包括:运行模式控制、列车自动调度、操作与显示、驾驶顺序控制、进路防护、道岔防护、列车防护、安全定位、速度曲线监控、牵引安全切断、在线诊断、系统通信、时钟同步、数据安全传输与隔离防护等。运行控制系统对其他系统实现控制的方式是通过与其他系统的接口完成数据交换。其他系统主要包括轨道系统、车辆系统、牵引控制系统,如图3所示。
4.1 与轨道系统的接口
运行控制系统与轨道系统之间的接口主要是分区道岔模块与道岔及道岔控制系统的接口,包括与道岔控制机的接口、与位置及锁闭传感器的接口、与道岔驱动供电单元的接口。该接口用于实现分区控制子系统对轨道道岔的移动控制和状态检测。
4.2 与车辆系统的接口
4.2.1 车载安全计算机接口
车载安全计算机与车辆的接口主要包括与列车定位系统单元的接口、与车载控制单元仿真模块的接口、与列车诊断计算机的接口及与列车操作台紧急停车按钮。
(1)与定位系统的接口主要是为运行控制系统传递高速磁浮列车上定位系统得到的定位数据.
(2)与车载控制单元仿真模块的接口主要是将运行控制系统的与安全相关的控制命令发给车载控制系统,由车载控制系统执行悬浮、导向、车载供电、开/关车门等指令。
(3)列车诊断计算机的接口主要目的是接受车辆的状态信息并诊断高速磁浮列车状态并及时反馈给运控系统。
(4)与列车操作台紧急停车按钮的接口是将高速磁浮列车紧急停车的指令发送给运行控制系统,运行控制系统接收到该指令后会控制高速磁浮列车停在当前停车点。
4.2.2 车载传输计算机接口
车载传输计算机的接口主要包括与牵引供电定位系统的接口及与列车诊断计算机的接口,上述接口主要负责车−地通信,将车辆定位、状态等数据直接传输至轨旁子系统,并将地面的控制信息传输至高速磁浮列车。
4.3 与牵引供电系统的接口
(1)分区安全计算机接口
运行控制系统的分区安全计算机与牵引控制系统的电机控制单元之间的存在接口,该接口的目的主要是将控制车辆运行的状态数据传送给牵引控制系统电机控制单元。
(2)分区牵引切断模块接口
运行控制系统的分区牵引切断模块与牵引变流器控制单元之间存在接口,该接口主要作用是当高速磁浮列车运行时出现车速超过最大速度曲线或者低于最低速度曲线等运行故障时,运行控制系统控制牵引变流器系统切断电流输出,从而切断牵引力。
(3)分区传输计算机接口
运行控制系统的分区传输计算机与牵引控制系统的电机控制单元的接口之间存在接口,该接口主要作用是通过车—地无线电系统向牵引供电系统传送高速磁浮列车定位数据,完成对牵引供电系统牵引电机的控制。
5 结束语
本文介绍了运行控制系统的构成及原理,通过对高速磁浮列车各系统间接口的研究,得出高速磁浮列车的运行控制需要多个系统的协同配合,才能共同保证高速磁浮列车运行的安全的结论。后续应当积极开展高速磁浮列车运行控制系统核心技术的国产化研究工作,为即将到来的实际工程化应用打下理论和技术基础。
-
[1] 李开成,佘江枫,马连川. 高速磁浮车载运行控制系统综述 [J]. 铁道通信信号,2020,56(8):1-5. [2] 中共中央国务院. 交通强国建设纲要[N]. 人民日报, 2019-09-20(4). [3] 孙玉玲,秦阿宁,董 璐. 全球磁浮交通发展态势、前景展望及对中国的建议 [J]. 世界科技研究与发展,2019,41(2):109-119. [4] 吴卫平,胡 剑,高 原. 高速磁浮运行控制系统与城轨信号系统CBTC的对比分析 [J]. 控制与信息技术,2018(3):56-59,64. [5] 杨 光,唐祯敏. 高速磁浮列车运行控制系统体系结构研究 [J]. 中国铁道科学,2006(6):68-72. DOI: 10.3321/j.issn:1001-4632.2006.06.014 [6] 王梓丞,易立富,谭冠华,等. 时速600 km高速磁浮运行控制系统关键技术研究 [J]. 铁道通信信号,2020,56(11):1-3,11. [7] 虞 翊,姜 西,林 辉,等. 基于防护速度的高速磁浮辅助停车区设置 [J]. 同济大学学报(自然科学版),2019,47(9):1310-1316. DOI: 10.11908/j.issn.0253-374x.2019.09.011 [8] 晏仁先. 基于离散事件的高速磁浮铁路车站作业仿真研究 [J]. 铁路计算机应用,2021,30(5):42-47. -
期刊类型引用(6)
1. 邱莹辉. 600 km/h高速磁浮列车追踪间隔时间计算方法及车站参数设计研究. 铁道运输与经济. 2025(03): 122-132 .  百度学术
百度学术
2. 孟川舒. 高速磁浮列车测速定位问题综述. 铁道标准设计. 2024(01): 178-184+211 . 百度学术
3. 葛鹭明. 基于线性二次调节器(LQR)的列车协同控制研究. 铁路通信信号工程技术. 2024(12): 1-8 . 百度学术
4. 谢联莲,虞凯,刘孜学,王梓丞. 长大干线高速磁浮无线通信系统工程方案研究. 铁路通信信号工程技术. 2023(06): 20-25+49 . 百度学术
5. 孟川舒,刘阳学. 常导高速磁悬浮运行安全监控总体方案研究. 铁路计算机应用. 2023(12): 33-37 . 本站查看
6. 徐东超,赵鹏,李宗亮,盖猛. 基于工业以太网的高速磁浮列车车载监控系统研究. 智慧轨道交通. 2022(05): 65-70 . 百度学术
其他类型引用(2)
 下载:
下载:
计量
- 文章访问数: 208
- HTML全文浏览量: 126
- PDF下载量: 40
- 被引次数: 8
