

Vibration displacement measurement method for railway bridge support based on line feature tracking
-
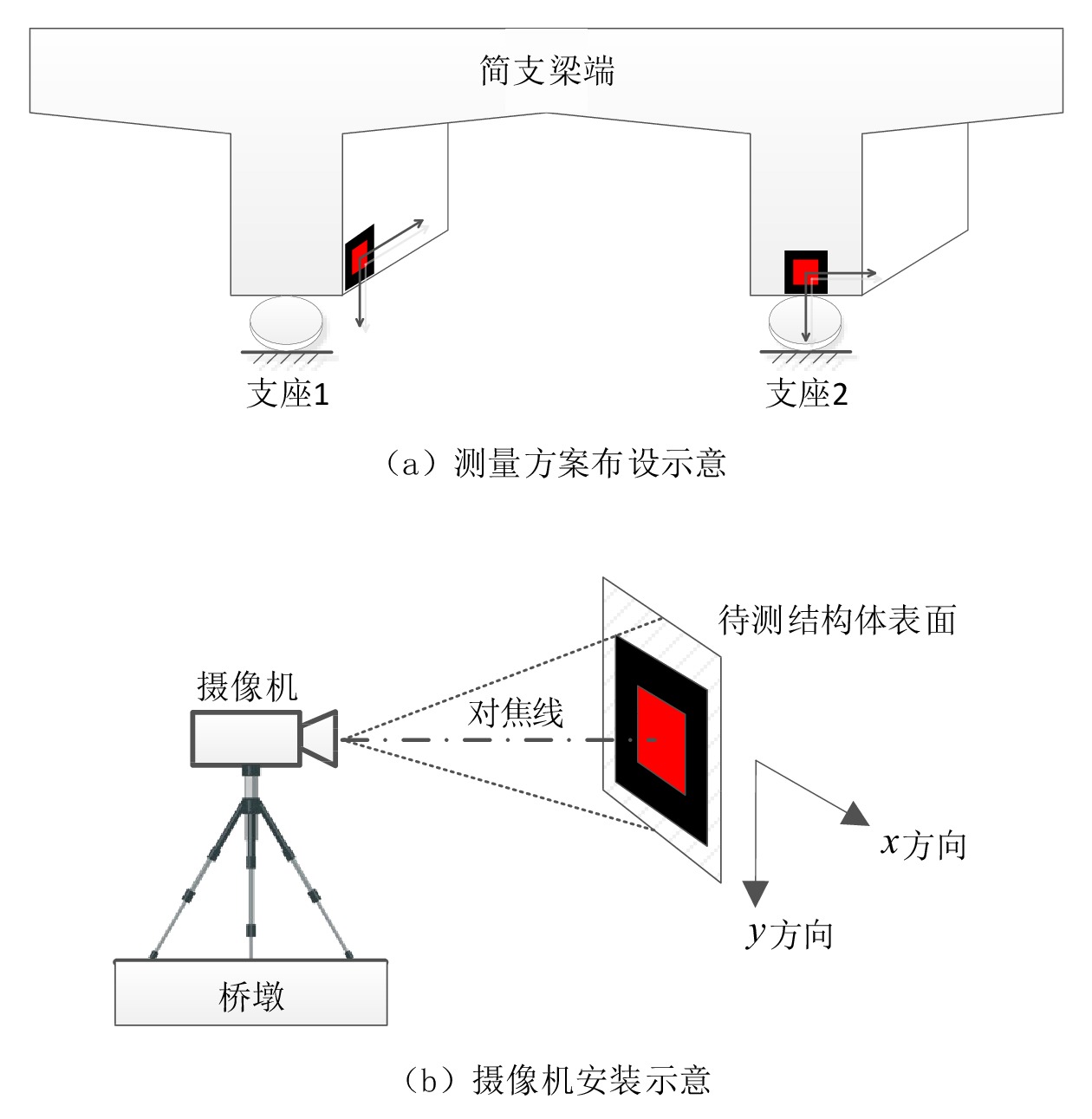
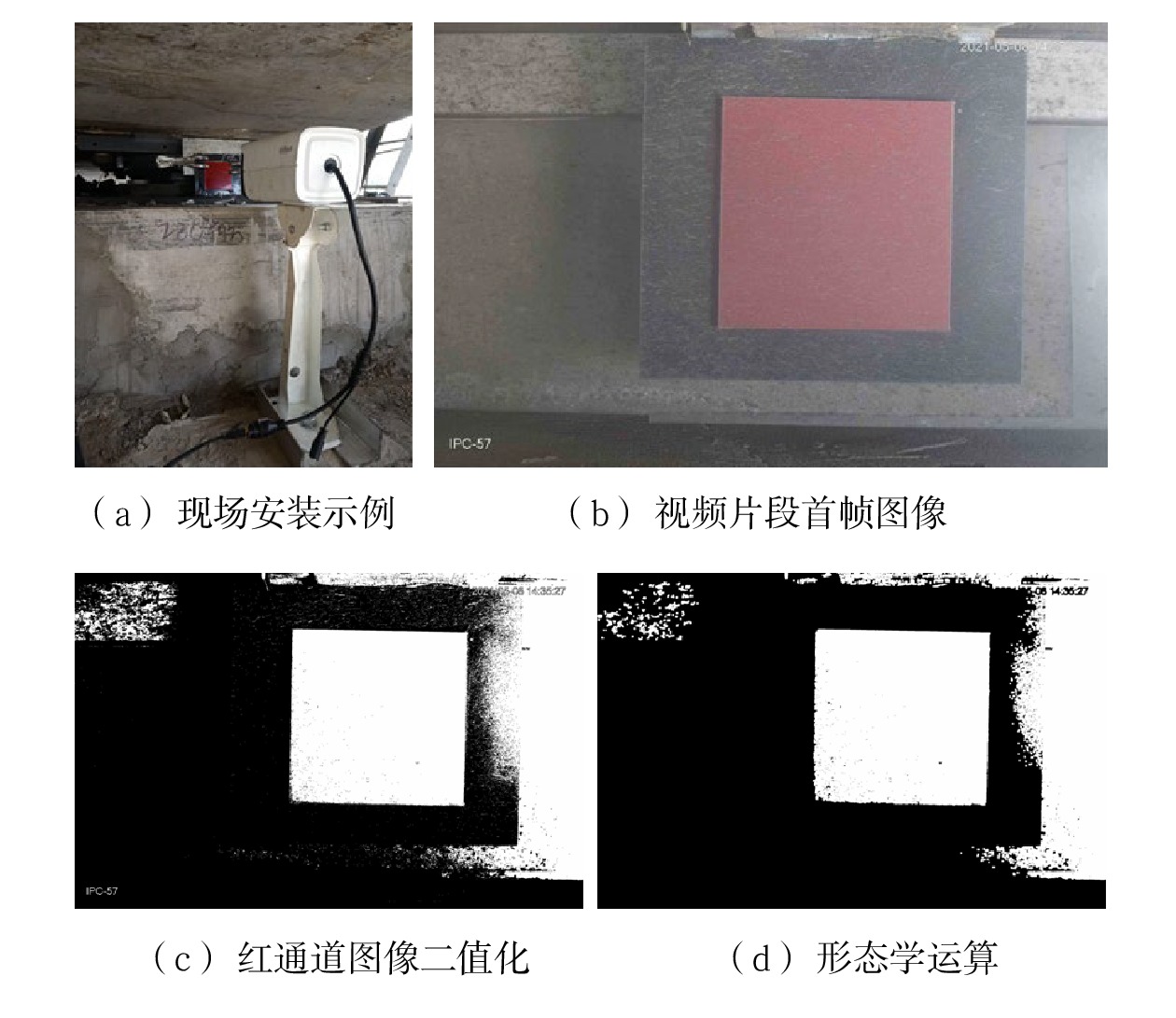
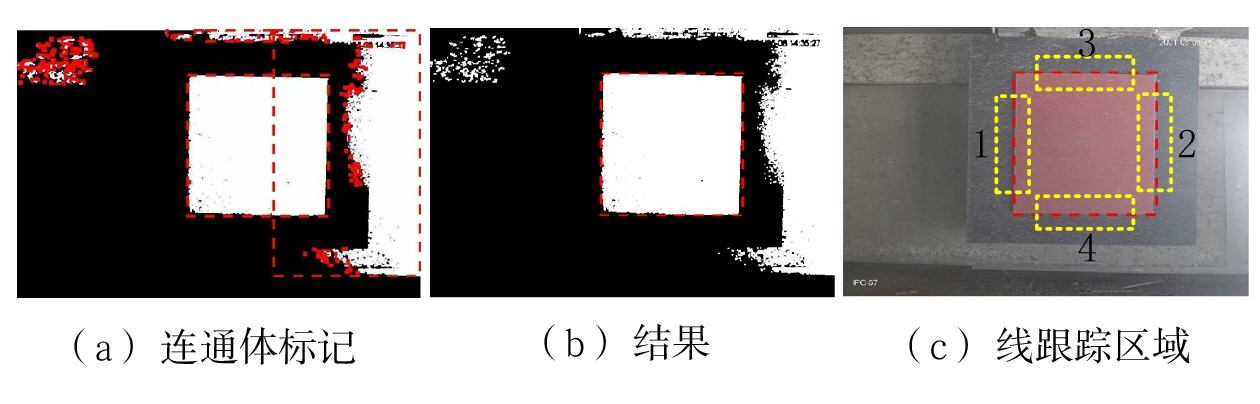
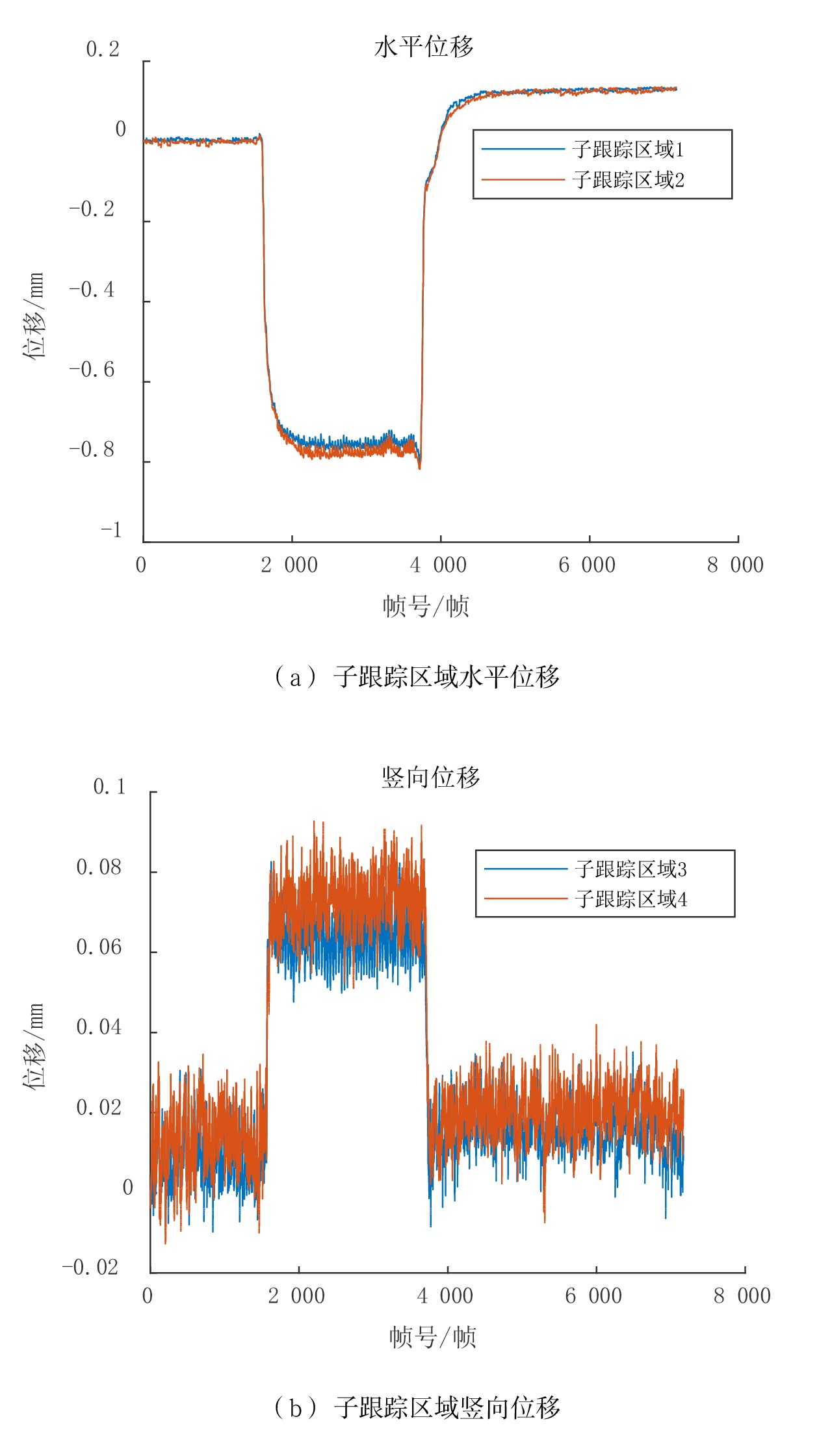
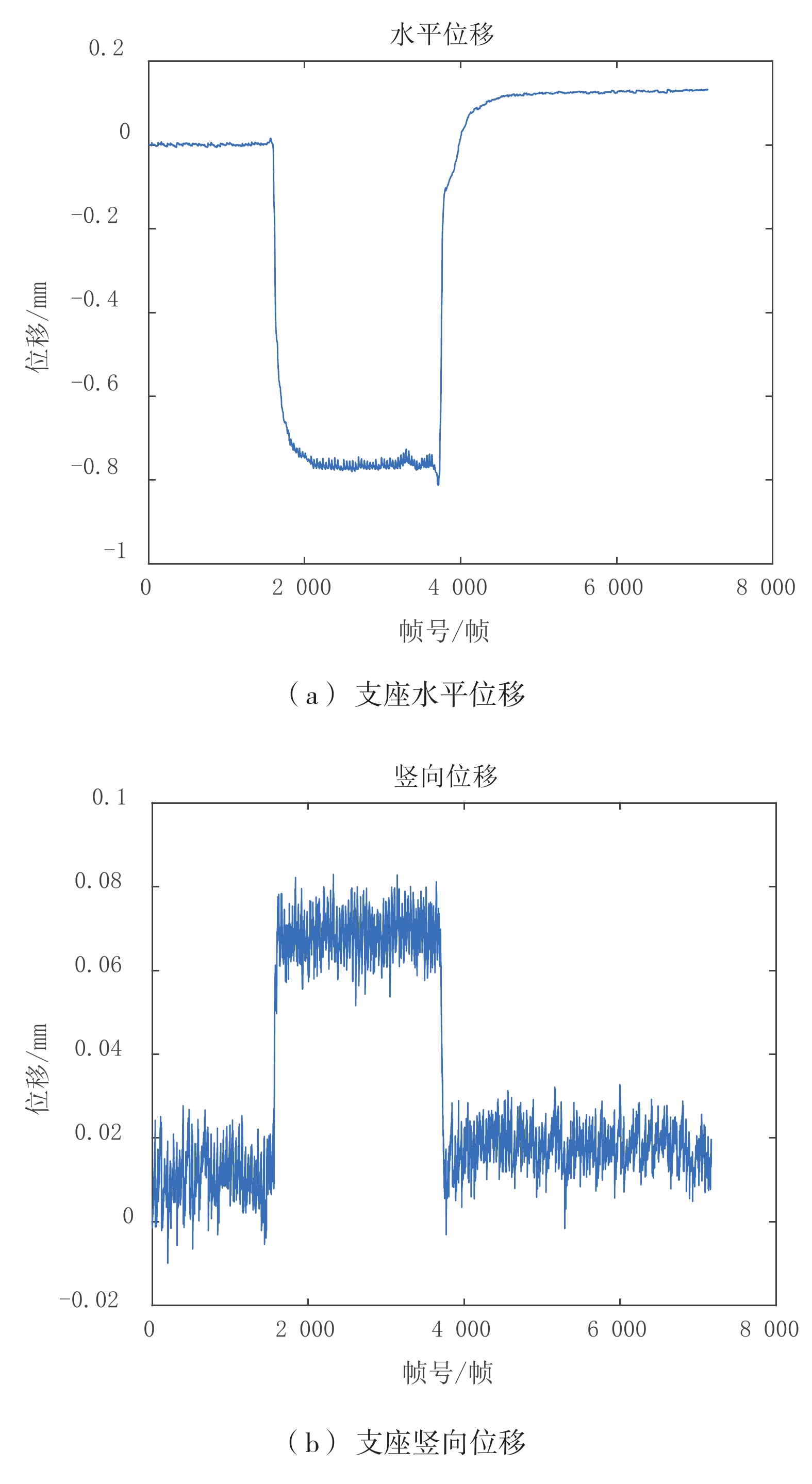
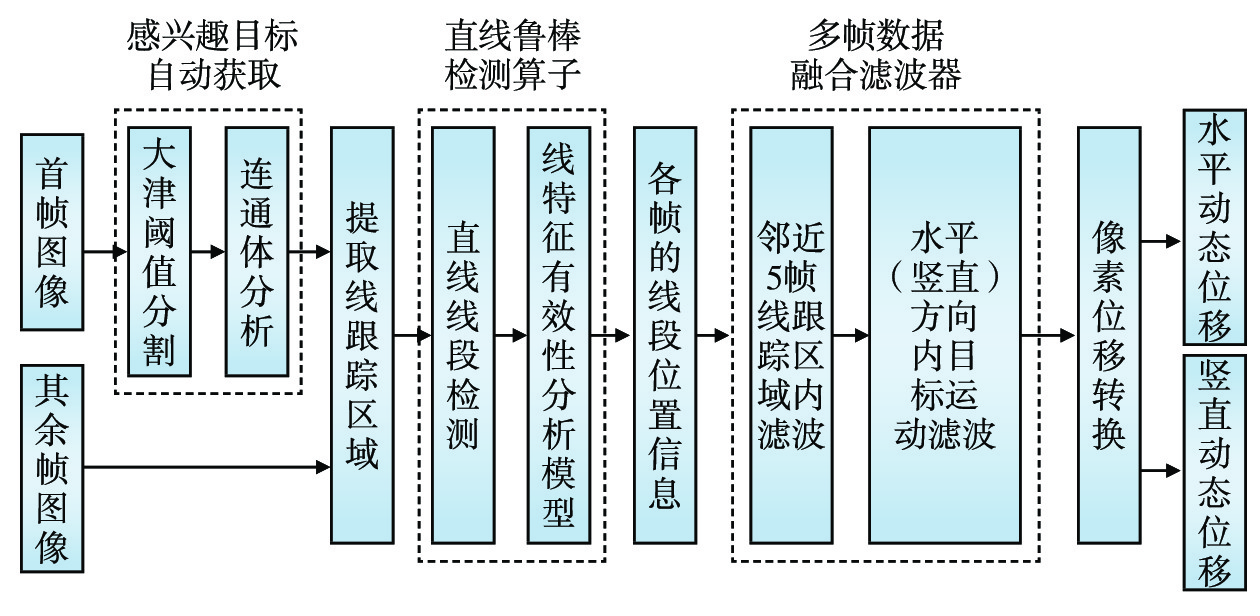
摘要: 针对现有基于结构物表面纹理特征跟踪的支座振动位移测量算法易受光照、背景杂波、运动模糊等因素干扰的问题,提出一种基于线特征跟踪的铁路桥梁支座振动位移测量方法。利用大津法与连通体分析法获取感兴趣目标,并基于感兴趣目标确定线跟踪区域,提高支座位移计算效率;利用一种直线鲁棒检测算子,快速提取桥梁支座振动过程中线跟踪区域中的线目标坐标变化;采用一种多帧数据融合滤波器,对桥梁支座振动位移数据进行后处理,从而实现对桥梁支座振动位移的精准计算。将该测量方法应用于实际搭建的桥梁支座振动位移监测系统中,应用结果表明,该方法在测量精度上取得较好结果,满足桥梁结构健康监测需求。Abstract: Aiming at the problem that the existing support vibration displacement measurement algorithm, which is based on surface texture feature tracking of structures, easily disturbed by lighting, background clutter, motion blur and other factors, this paper proposed an accurate measurement method for railway bridge support vibration displacement based on line feature tracking. In order to improve the calculation efficiency of the support displacement, the paper obtained the target of interest by using Otsu method and continuum analysis method, and determined the line-tracking area based on the target of interest, enhanced the calculation efficiency of support displacement; used a linear robust detection operator to quickly extract the coordinate changes of the line-tracking area during the bridge support vibration; used the fusion filter to post-process the bridge support vibration displacement data and finally implement the accurate calculation of the bridge support vibration displacement. The measurement method was applied to the actual bridge support vibration displacement monitoring system. The application results show that the method achieves good results in measurement accuracy and meets the needs of bridge structure health monitoring.
-
在地铁营运的高峰时段,站台人流量大且非常密集。若地铁闸机出现故障不及时修复,车站通行效率将大幅降低,且增加安全隐患。
时间序列预测通过将某一现象统计指标的数值按时间先后顺序形成数列,从中分析发现该现象随时间变化的规律,得出一定的模式,并基于此模式预测该现象将来的情况。时间序列预测在经济、金融、工程等领域有着广泛的应用[1-2]。产品的故障时间序列作为重要的可靠性指标,能够反映产品故障的动态演化过程。目前,常用的分析故障时间序列预测的方法有:自回归移动平均(ARIMA,Autoregressive Integrated Moving Average)[3]、奇异谱分析(SSA,Singular Spectrum Analysis)[4]、支持向量回归(SVR,Support Vector machines Regression)[5]、人工神经网络[6](ANN,Artificial Neural Network)等。
本文采用CNN+LSTM混合神经网络,对地铁闸机扇门机构故障时间序列预测进行研究,以期准确掌握故障规律,制定合理的维修计划,减少应急维修频次,保障地铁车站运营可靠性和安全性。
1 机器学习相关研究及应用
机器学习模型在过去几年中取得显著进步,在轨道交通领域已有不少应用。茅飞[7]使用ARIMA模型预测分析闸机口各个时段的客流量,合理安排工作人员,疏导城市交通,并调节闸机参数,提高其工作效率;徐文文等人[8]针对列车供电系统无法有效拟合和预测受电弓滑板的磨损趋势问题,利用优化的SVR对其进行预测,提升受电弓的效能;李建伟等人[9]采用BP神经网络对故障数据进行学习训练,检测学习相关度,预测城市轨道交通车辆的可靠性。
作为机器学习的热门分支,深度学习逐渐被应用到故障时间序列的研究中。常见的深度学习诊断模型包括深度自动编码器、递归神经网络和长短期记忆神经网络(LSTM)等[10]。LSTM擅长学习具有长程依赖关系的时间序列数据,对识别高维时间序列中的长程依赖性和时序性具有明显优势,而卷积神经网络(CNN)[11]适合处理具有统计平稳性和局部关联性的数据。基于CNN+LSTM混合神经网络的时间序列预测已在多个领域得到应用,如图像识别、自然语言处理、智能电表故障检测[12]、能源资产能量预测、设备剩余使用寿命预测[13]等方面,具有精度高、适用性广、可拓展的特点。
目前,国内尚未见针对地铁闸机故障时间序列预测分析的相关研究。
2 基于CNN+LSTM的故障时间序列预测方法
2.1 CNN
用于时间序列预测的典型CNN由1个用于提取特征图的单卷积层、1个用于特征图二次采样的单合并层及1个用于学习输出的完全连接层组成。
令
X={X1,⋯,XN},Xi=[x1,⋯,xT]T 作为具有N 个样本和T 个嵌入维的输入时间序列,且Yi=[xT+1,⋯,xT+H]T 是具有H 个预测范围的相应输出序列,带有C的卷积滤波器可以表示为:fc=c∑j=1(T−K+2∑i=1βijpij)+β0 (1) pij=∑Kpkp=1mi+kpjKp,i=1,⋯,T−Kp−Km+2 (2) mtj=σ(Km∑km=1wkmjxt+km−1+bj),t=1,⋯,T−Km+1 (3) 其中,
K=KP+Km,Kp 和Km 分别是池化层和卷积运算层的内核大小,pj 表示特征图向量[p1j,⋯,pT−K+2j]T ,mj 表示特征图像量[m1j,⋯,mT−Km+1J]T ,σ(.) 是非线性激活函数,wj=[w1j,⋯,wKmj] 和bj 分别是第j 个滤波器的权重和偏差。2.2 LSTM
LSTM由3个门组成,分别为遗忘门、输入门和输出门。
遗忘门是
sigmod 函数的常用单元,用于决定保留或者删除现有信息;通过ht−1 和xt 输出值ft (0~1)来表示细胞状态Ct−1 ,0表示完全与学习值脱节,1则表示保留完整的值,输出公式为:ft=σ(Wfh⋅[ht−1]+Wfx[xt]+bf) (4) 其中,
bf 为常数,σ 表示sigmod 函数。输入门决定是否将新信息添加至LSTM中,由sigmod层和tanh层组成;sigmod层决定哪些值需要更新替换,tanh层为新候选值创建一个向量并添加到LSTM中,这些信息更新到现有细胞信息中,可表达为:
it=σ(Wih[ht−1]+Wix[xt]+bi) (5) ~ct=tanh(Wch[ht−1]+Wcx[xt]+bc) (6) 其中,
it 表示该值是否需要更新,~ct 表示新候选值的向量,ht−1 表示细胞输出。输入门为LSTM的存储提供更新,使用遗忘门将旧值(
i ,ct−1 )相乘,然后加上新的候选值it⋅ ~ct 来忘记当前值,可表达为:ct=ft⋅ ct−1+it⋅ ~ct (7) 输出门通过sigmod层来决定LSTM内存的哪一部分对输出做出贡献,再使用非线性tanh函数将向量值映射至−1和1之间,最后将结果乘以sigmod函数并输出,可表达式为:
ot=σ(Woh[ht−1]+Wox[xt]+bo) (8) ht=ot⋅ tanh(ct) (9) 其中,
ot 表示输出值,ht 表示介于−1和1之间的值,W 和b 分别指代各状态的权重和偏置量。2.3 基于CNN+LSTM的故障时间序列预测
基于从简设计循环神经网络的原则,分析高维多变量时间序列数据,构建基于CNN+LSTM的时间序列预测模型,其整体框架如图1所示,包括输入层、隐藏层、输出层及Adam优化4个功能模块。
其中,输入层完成闸机故障数据的采集和处理;隐藏层采用CNN+LSTM构建循环神经网络,采用经过归一化的特征数据,通过卷积层和池化层,提取出数据中重要特征后,输入到多层结构的LSTM网络中,并利用全连接层中Dropout(全连接层中的一个功能)来防止过拟合,提升模型泛化能力;再经Adam算法优化和损失计算,最后通过输出层进行迭代,输出预测结果。
具体算法描述如下:
(1)以月为单位,通过滑动窗口训练,采用归一化数据集输入,迭代次数
epochs 设置,从卷积层获取特征向量x ,I={i|xi≠0} ,将x 输入,进行卷积与池化操作得到特征向量y ,使用ReLU函数激活,即max 通过池化层输入LSTM神经网络。(2)通过LSTM神经网络,将输出概率
{h_t} 输入ReLU函数中,得到0~1之间的值,设置阈值后对结果进行分类,并将结果与样本标签进行比对,计算交叉熵损失函数,并使用Adam优化算法对权值进行优化,即有:{o_t} = {\rm{\sigma}} \left( {{W_{{x_o}}} \cdot\ {x_t} + {W_{{h_o}}} \cdot\ {h_{t - 1}} + {W_{{c_o}}} \odot {C_t} + {b_o}} \right) (10) {h_t} = {o_t} \cdot\ \tanh \left( {{c_t}} \right) (11) (3)按照上述步骤调整输入,结束前向传播,得到预测输出值。再利用真实值,进行反向传播并更新参数,完成训练。
3 闸机扇门机构故障数据分析与度量指标
采用某型号地铁闸机2015年—2019年期间237条在役闸机的扇门机构故障记录,包括站点及闸机编号、故障时间、故障原因、故障现象、电机运行电流、线缆连接是否稳固、扇门门体与中门间隙值、运行噪声值、扇门主要机构动作是否正常等数据。
对故障时间序列中的冗余数据和空值进行清洗,移除冗余数据,采用均值对空值进行填充。
故障率指工作到
t 时刻尚未失效的产品,在t 时刻后的单位时间内发生失效的概率,记为\lambda \left( t \right) 。对于有限样本,设样本数目为N ,经过时间t 有n\left( t \right) 个样本失效,而在\left( {t + \Delta t} \right) 时刻产品的失效数为n\left( {t + \Delta t} \right) ,则故障率估计值为:\widehat \lambda \left( t \right) = \frac{{n(t + \Delta t) - n(t)}}{{N\Delta t}} (12) 地铁闸机发生故障后,会更换故障模块,被更换的模块返厂维修,相当于总体样本在维修后进行了一次更新。本文近似的认为下一个周期(单位时间)的故障率约等于故障数除以样本总数。
经整理得到包含70个数据点的月度故障时间序列数据,如图2可知,随着不断的维修,闸机系统级故障率总体呈上升趋势。
故障率样本分组方式:故障率样本总数为
n ,将其分为m 个组;每组包含n - m + 1 个值,其中前n - m 个值为训练用输入样本,第n - m + 1 个值为期望映射;m 个组中前k 组用于训练,后m - k 组用于检测。如表1所示,将这70条数据分成60组,每组包含11个值;前10个值为训练用输入样本,第11个值为期望映射;60组数据中,前40组用来训练,后20组进行检测。
表 1 故障率数据分组组号 输入样本 期望映射 X1 0.004 311,…,0.034 483 0.004 213 X2 0.004 213,…,0.025 862 0.017 241 \vdots \vdots \vdots X61 0.107 758,…,0.129 311 0.116 379 为评价预测模型的预测准确性,选择3个统计指标:均方根误差(RMSE)、平均绝对误差(MAE)和测定系数(R2)。
{\rm{RMSE}} = \sqrt {\frac{1}{n}\sum\limits_{t = 1}^n {{{({y_t} - \widehat {{y_t}})}^2}} } (13) {\rm{MAE}} = \frac{1}{n}\sum\limits_{t = 1}^n {|{y_t} - \widehat {{y_t}}|} (14) {\rm{{R^2}}} = 1 - \dfrac{{\displaystyle \sum\nolimits_{t = 0}^{n - 1} {{{({y_t} - \widehat {{y_t}})}^2}} }}{{\displaystyle \sum\nolimits_{t = 0}^{n - 1} {{{({y_t} - \overline {{y_t}} )}^2}} }} (15) 其中,
n 为样本数,{y_t} 表示真实值,\widehat {{y_t}} 为预测值,\overline {{y_t}} 表示闸机门机构故障数据真值的均值。RMSE和MAE接近0意味着性能更好,而R2接近1则性能更佳。
4 预测结果与分析
4.1 实验环境配置
实验环境配置见表2。
表 2 实验环境配置实验环境 配置 操作系统 Windows 10 CPU I7-9750H GPU RTX 2060 运行内存 16 GB 程序语言 Python 3.7.4 程序框架 Tensorflow 2.1.0 4.2 参数调节
为获得最优结果,需要调节故障时间序列预测模型中多个超参数,主要包括:卷积核的大小、CNN的移动步长、激活函数的选取、CNN的深度、LSTM的步长、隐藏层节点数、Dropout值和优化方法的选取。经测试发现,CNN的移动步长、CNN的深度、LSTM的隐藏层节点数、每次训练所选取的样本数对预测结果的影响较大。经实验对比,CNN+LSTM故障时间序列预测模型的参数设置见表3。
表 3 CNN+LSTM故障时间序列预测模型的参数设置模型层 参数 Conv1D (32,5,1) Dropout 0.01 Batch Normalization - Activation relu Conv1D (32,5,1) Activation relu Maxpooling1D 1 LSTM 64 LSTM 64 Activation sigmod Flatten - Dense 32 Dense 1 4.3 结果分析
本文采用故障率指标对数据集中每条故障数据进行归一化,并将数据集随机分为2组:训练数据集(占70%)和验证数据集(占30%)。经预训练,从规范化故障数据中提取时序特征,利用预测模型所准备的数据进行再训练。
为评估CNN+LSTM混合神经网络时间序列预测模型的性能,与CNN、LSTM及ARIMA这3种单一预测模型进行比较,结果如图3~图6所示,表4列出了这4种模型预测结果准确性的对比。
表 4 4种模型预测结果准确性对比模型名称 RMSE MAE R2 CNN+LSTM 0.024 971 0.141 886 0.73 ARIMA 0.051 942 0.164 640 0.37 CNN 0.026 694 0.145 570 0.67 LSTM 0.026 880 0.144 942 0.63 由表4可知:
(1)ARIMA模型要求时序数据(不论是否经过差分化)具备稳定性,即只能捕捉线性关系,未考虑地铁闸机工作中各种复杂变量所带来的影响,其RMSE和MAE指标上的表现都是最差的。
(2)CNN模型与LSTM模型的预测效果及各项性能指标均相差不大,但由于训练数据量不足,CNN与LSTM图像分析的中后期均出现一定的滞后现象;CNN仅考虑当前输入,不具备记忆功能,会丢失部分信息,也会忽略局部与整体之间的关联性;LSTM因具有全局性记忆功能,但在训练大数据量时,需要更高的硬件条件。
(3)CNN+LSTM混合神经网络模型利用CNN通道提取时序特征,并通过LSTM输出到全连接层,以获得预测信息,其性能优于其它单一模型;相比CNN模型和LSTM模型,其RMSE值分别提升6.45%与7.11%,R2值分别提升8.96%与15.87%。
5 结束语
构建基于CNN+LSTM混合神经网络的故障时间序列预测模型,利用某型号地铁闸机扇门机构的故障数据,以降低预测误差为目标,调节模型参数,对高维故障数据进行特征提取,经神经网络迭代训练后输出预测结果;并与ARIMA、CNN和LSTM模型的预测结果进行对比,结果表明:CNN+LSTM混合神经网络时间序列预测模型的预测结果准确性较高,具有较好的应用前景。
研究成果可用于支持地铁闸机维修计划的制定和优化,减少应急维护频次,保障地铁车站运营的可靠性与安全性。
-
[1] 杜 鹏,邵 帅,余忠儒,等. 桥梁全息性态特征提取方法试验研究 [J]. 科学技术与工程,2020,20(25):10459-10465. DOI: 10.3969/j.issn.1671-1815.2020.25.049 [2] 崇爱新,尹 辉,刘艳婷,等. 基于双目视觉的无缝线路钢轨纵向位移测量方法研究 [J]. 仪器仪表学报,2019,40(11):82-89. [3] 涂 伟,李清泉,高文武,等. 基于机器视觉的桥梁挠度实时精密测量方法 [J]. 测绘地理信息,2020,45(6):80-87. [4] Tung Khuc, F. Necati Catbas. Completely contactless structural health monitoring of real‐life structures using cameras and computer vision[J]. Structural Control and Health Monitoring, 2017, 24(1): 1-17.
[5] Rolands Kromanis, Prakash Kripakaran. A multiple camera position approach for accurate displacement measurement using computer vision [J]. Journal of Civil Structural Health Monitoring, 2021, 11(3): 661-678. DOI: 10.1007/s13349-021-00473-0
[6] Vicente Miguel A, Gonzalez Dorys C, Minguez Jesus, Schumacher Thomas. A Novel Laser and Video-Based Displacement Transducer to Monitor Bridge Deflections. [J]. Sensors, 2018, 18(4): 970. DOI: 10.3390/s18040970
[7] DUDA R O, HART P E. Use of the Hough transform to detect lines and curves in pictures [J]. Communications of the ACM, 1972, 15(1): 11-15. DOI: 10.1145/361237.361242
[8] 汪 林,王燕午,王 琳,等. 基于无人机的航空影像电力线提取方法的研究 [J]. 城市勘测,2013(3):92-95. DOI: 10.3969/j.issn.1672-8262.2013.03.023 [9] VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: A Fast Line Segment Detector with a False Detection Control [J]. IEEE transactions on pattern analysis and machine intelligence, 2010, 32(4): 722-732. DOI: 10.1109/TPAMI.2008.300
-
期刊类型引用(1)
1. 吴强,屈利杰. 基于ARIMA和XGBoost算法的辅逆系统故障预测. 大连交通大学学报. 2021(01): 96-100 .  百度学术
百度学术
其他类型引用(3)











































 下载:
下载:






































计量
- 文章访问数: 140
- HTML全文浏览量: 79
- PDF下载量: 28
- 被引次数: 4
